
Abstract
Environmental stressors in city traffic are a relevant health threat to urban cyclists and pedestrians. These stressors are multifaceted and include noise pollution, heat, and air pollution such as particulate matter. In the present chapter, we describe the use of wearable sensors carried by volunteers to capture their exposure to environmental stressors on their everyday routes. These wearable sensors are becoming increasingly important to capture the spatial and temporal distribution of environmental factors in the city. They also offer the unique opportunity to provide individualized feedback to the person wearing the sensor as well as possibilities to visualize different stressors in their temporal and spatial distribution in a virtual reality environment. We used the option of providing individualized feedback on personal exposure levels in two randomized controlled field studies. In these experiments, we studied the psychological health-related outcomes of carrying a wearable sensor and receiving feedback on one’s individual exposure levels.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
Volunteered geographic information (VGI) that is collected by laypeople can be utilized by other citizens and enables scientific investigations that can be seen as a special form of citizen science (Connors et al. 2012; Goodchild 2007). User-generated content such as VGI has proliferated in recent years and is a form of crowdsourcing, where information is drawn together from several non-expert individuals (Elwood et al. 2012). Besides many other applications, VGI has been used in environmental monitoring (Connors et al. 2012) and public transport planning (Giuffrida et al. 2019). Multi-level data mashups—the integration of different forms of information—are becoming increasingly important to layer information in respect to specific locations (Elwood et al. 2012). While some VGI is socially embedded and subjective (Elwood et al. 2012), sensor data can be objectively geotagged.
The aim of this chapter is to demonstrate how VGI can take advantage of smart sensors for the assessment of environmental data that is relevant for human health. In the approach described here, we develop a specific design of VGI techniques that can support city planners and urban authorities as well as individuals who are vulnerable to elevated levels of environmental pollutants and heat. We hypothesize that VGI can improve health protection, which is particularly important for susceptible and vulnerable individuals. The following sections outline the methods and the design of our studies and summarize the results.
2 Measuring Environmental Stressors
Epidemiological studies have consistently demonstrated links between exposure to particulate matter and adverse health effects (World Health Organization 2016; Stafoggia et al. 2022). To protect human health, air quality monitoring is regulated by European Directives (European Parliament 2008). Personal exposure to environmental stressors is multifactorial and includes exogenous factors contributing to human health risks (Schlink and Ueberham 2020), such as air temperature, air humidity, air pollutants (gasses, particulate matter), and noise. In Leipzig, traffic is a major source of intra-city PM10 and NOx emissions, while small combustion plants are a source of other emissions (Stadt Leipzig 2018).
Due to the individual differences in daily activities, each person has very individual exposure patterns, which obviously cannot be adequately captured by measurements at a few monitoring stations in the city (improved approach; see Steininger et al. 2020) but require person-specific measurements (Dias and Tchepel 2018; Hinwood et al. 2007). However, air pollution data from a terrestrial monitoring station can only be considered representative of the surrounding district. Such measurements are strongly influenced by the location of the stations, and the dispersion and dilution of air pollutants are affected by meteorological and local conditions (e.g., urban structure; built-up areas, street canyons, traffic networks, and green areas). Therefore, it does not adequately capture the spatial variability of locally sourced pollutants and cannot be an indicator of human exposure (Adams and Kanaroglou 2016; Dionisio et al. 2013). The activities of individuals and air pollution levels exhibit a large degree of spatiotemporal dynamics. This emphasizes the necessity to investigate near-real-time measurements and to develop methods for data assessment (Yang et al. 2022).
With advances in technology in the fields of electrical engineering and wireless networks, “low-cost” air quality sensors have been developed to make air quality monitoring more accessible and portable (Castell et al. 2017; Snyder et al. 2013). In the past several years, evidence has begun to emerge about the usefulness of low-cost sensors. Studies have shown various applications, for example, the classification of emissions sources. Low-cost sensors have a limited ability to detect nanoparticle real-time emissions from residential sources (Wang et al. 2020). However, low-cost sensors were found to perform well in both ambient (field) and controlled (laboratory) conditions (Connolly et al. 2022).
3 Citizen Science and VGI in the Context of Environmental Tracking
Including the general public in the production of scientific knowledge is becoming increasingly important (Eitzel et al. 2017). From collecting data (e.g., about local wildlife sightings), processing large amounts of data on private computers, or contributing tedious work by cataloging pictures of animal colonies or galaxies to a deeper involvement in identifying research questions and procedures, laypeople can contribute to scientific progress (Strasser et al. 2019). While citizen science can arise from grassroots movements with an activist agenda (Ottinger 2010), it is most often initiated by scientific and educational institutions (Eitzel et al. 2017). Citizen science can not only shift workload to interested citizens and create unique monitoring opportunities (Aceves-Bueno et al. 2015; Verplanke et al. 2016). It can also serve in educating laypeople about the scientific process and increase public interest and trust in science (Strasser et al. 2019). The use of wearable sensors to collect data on environmental stressors around the city can be understood in the framework of citizen science, as laypersons collect data and investigate their own exposure to pollution as they explore their surroundings. This immersion in the scientific process can not only aid in data collection but also help citizens to identify the least polluted areas in their city. Platforms that integrate data from citizen scientists have been developed to share and visualize environmental information from different sources (Lautenschlager et al. 2018). A plethora of studies indicates that volunteers have a high interest in their personal exposure to environmental stressors, though behavior change to avoid these stressors is often hard to implement (see Becker et al. 2021 for a review).
4 A Health-Psychological Perspective
Tracking environmental stressors with a wearable sensor makes it possible to give individualized feedback to the users. Thereby, they receive information on potentially harmful exposure levels to air pollution, heat, and noise pollution. As these stressors (e.g., particulate matter) cannot be perceived directly, this is new information that may elicit fear in the user. Fear appeals have been studied by psychologists in the past, showing that effects of fear appeals on behavior change (e.g., smoking cessation) are strongest when the negative consequences of a harmful behavior are seen as personally relevant and likely to occur (Rosenstock 1974; Rogers 1975). Choosing highly polluted routes in the city can be framed as a harmful behavior to one’s health, and messaging should motivate people to choose less polluted routes, e.g., smaller streets with less traffic. Two influential theories in health psychology, namely, the health belief model (Rosenstock 1974) and protection motivation theory (Rogers 1975, 1983; Maddux and Rogers 1983), have studied health-related behavior change such as smoking cessation or physical exercise. Both theories have in common that they predict a healthy behavior change when negative health outcomes of a current behavior are seen as severe and a person feels susceptible to these negative outcomes. In our case, this may be that people perceive the health effects of particulate matter to be serious and that it is likely that they will be affected by these, if they do not lower their exposure. Additionally, persons must see a behavior change as useful to mitigate the risk of illness and feasible to implement (Rogers 1983; Maddux and Rogers 1983). Perceived psychological costs or barriers will reduce the likelihood of behavior change (Rogers 1983). For example, if a person is not willing to take a longer route to work or to use a side street with a less comfortable surface to cycle on, this will reduce the likelihood of them changing their route. In more technical terms, protection motivation theory posits that both threat appraisal (harmful outcomes of the current situation are severe and likely to occur) and coping appraisal (alternative behaviors will be effective in mitigating the threat and are feasible to implement) contribute to health-related behavior change (Rogers 1983; Maddux and Rogers 1983). Research on protection motivation theory has found that both threat appraisal and coping appraisal must interact to elicit a problem-focused coping response (Babcicky and Seebauer 2019; Rippetoe and Rogers 1987). If a person only perceives high threat but has a low coping appraisal, they might choose emotion-focused coping strategies rather than problem-focused coping. These emotion-focused strategies, such as denial, fatalism, or wishful thinking, will reduce the emotional burden of the threat but not result in healthy behavior change (Babcicky and Seebauer 2019; Rippetoe and Rogers 1987). Protection motivation is most commonly applied to health behaviors (Plotnikoff and Trinh 2010; Prentice-Dunn et al. 2009). However, it can also be applicable to other behavioral safety measures, for example, in relation to flood events (Babcicky and Seebauer 2019), climate change (Bagagnan et al. 2019), the adoption of electric vehicles (Bockarjova and Steg 2014), household water management (Bryan et al. 2019), earthquake preparedness (Mulilis and Lippa 1990), and wildfire protection (Dupéy and Smith 2019).
5 Visualizing Environmental Stressors
The amount and variety of data are increasing in all research fields, which means that analyzing these large, complex datasets has become a challenging task (Avazpour et al. 2019). That includes integrating data from multiple heterogeneous sources, normalizing these data, and providing a unified view of these data sets to users (Tian and Li 2019). Collecting, integrating, aligning, and efficiently extracting information from heterogeneous and autonomous data sources are considered a major challenge (Fusco and Aversano 2020). In this context, visualization is an important tool that makes it possible to analyze complex data. Scientific visualization assists scientists in analyzing data by transforming data into geometric representations, thus supporting the analysis of complex data (Gershon and Eick 1995; Defanti and Brown 1991). In addition, virtual reality (VR) is recognized as a powerful human-computer interface (Burdea and Coiffet Philippe 2003). Users can immerse themselves in a virtual world and manipulate it by changing their viewpoint and interacting (Brooks 1999). VR environments are a promising tool for scientists to visualize their large and complex data sets and to control the behavior of virtual objects using interaction functions (Simpson et al. 2000). The combination of the power of a VR system and the human ability to detect interesting patterns and inconsistencies in the data makes VR a suitable tool to solve future scientific visualization tasks (van Dam et al. 2002). VR is also used in the context of urban planning in some prototypical projects, for example, in knowledge transfer on the value of urban greenery (Mokas et al. 2021), the investigation of the perceived safety level of cyclists (Nazemi et al. 2021), different planning phases of high-rise building construction (Lu et al. 2021), green landscape planning and design (Pei 2021), and the evaluation of urban spaces (Luigi et al. 2015; Zhang and Zhang 2021). One way to combine methods of visualization and VR, as well as to implement analysis methods and make them available via a graphical user interface (GUI), is to use the Unity Game Engine (Helbig et al. 2015). Its use in scientific projects has increased in recent years, e.g., for integration of 3D building model data (Keil et al. 2021), visualizing 3D point clouds captured by drones (Weißmann et al. 2022), implementing a walkable virtual city model (Schmohl et al. 2020), and simulating secure hazardous transportation (Yang et al. 2020). Another argument for the use of game engines is the possibility to integrate audio data in a straightforward way, which increases the degree of immersion considerably (Hruby 2019; Berger and Bill 2019; Rafiee et al. 2017) and is not available in conventional visualization tools for geodata. In the presented project, we implemented a visualization and analysis application for mobile sensing data and questionnaire data in combination with other urban data such as 3D city model, traffic data and noise maps from the city of Leipzig, and weather station data to explore the data with scientists as well as decision makers and citizens.
6 Implementation: Two Field Experiments Using Wearable Sensors
We conducted two field experiments with wearable sensors in order to explore the spatiotemporal distribution of environmental stressors in the city of Leipzig. Another aim of these studies was to test the psychological effects of carrying wearable sensors and receiving feedback about one’s personal exposure levels. Lastly, one of our aims was to implement innovative ways to integrate and visualize sensor data and subjective experiences of participants with the sensors.
6.1 Field Study 1
6.1.1 Design and Procedure of Study 1
To test the psychological effects of carrying the sensors, we conducted experiments as randomized controlled trials, including a measurement group that carried the wearable sensors and a control group that did not receive the sensor kit. The first field experiment was run from July to September 2020. After registering on our website, participants were allocated to a week of participation. Within each study week, participants were randomly allocated to either the measurement group or the control group. Persons in the measurement group carried the measurement kit for three days and received individualized feedback about their exposure to heat, particulate matter, and noise after the measurement phase. Participants in the control group did not carry the measurement kits but received questionnaires including the same questions as in the measurement group. This allowed us to compare the answers of those in the control group to those in the measurement group and identify the effects of the intervention. On Fridays before their allocated study week, all participants received a first questionnaire. Persons in the measurement group then picked up the measurement device on Monday and used it for three consecutive days to measure their exposure on everyday routes by bike or as pedestrians. They returned the measurement kit on Thursdays. The next day, all participants received a link to the second questionnaire (both those who carried the measurement kit and those in the control group). We then retrieved the data from the measurement kits and compiled individual feedback reports for those who wore the sensors. One week after the measurement ended, each person from the measurement group received their feedback report and a third questionnaire. The feedback report included general information about particulate matter, heat, and noise as environmental stressors. The report also showed graphs indicating the accumulated stressor levels throughout the measurement phase. A color-coded legend indicated the magnitude of exposure with reference to noise levels (silent room–pain threshold) or temperature ranges (no temperature stress–extreme temperature stress). Approximately 2 to 4 months after their participation, both the measurement and the control group were sent the link to a follow-up questionnaire (with some outliers submitting after 1.6 to 4.7 months) (Fig. 11.1).

Experimental procedure for the measurement group in study 1
6.1.2 Sensors Used for Measuring Environmental Stressors in Study 1
The measurement system consisted of three different devices: (1) smartphone Motorola, Moto G3, launched in July 2015 and operated with android system; (2) Little Environmental Observatories (LEO) Electrochemical sensors widely used for the detection of toxic gasses at the parts per million (ppm) level and for oxygen in levels of percent of volume (% vol)—toxic gas sensors are available for a wide range of gasses, including NO2, NO, and O3 (Robinson et al. 2018), providing the current temperature and relative humidity (Ateknea Solutions Catalonia S.A.; https://ateknea.com); and (3) Dylos-DC1100, an air quality monitor that measures particulate matter (PM) number concentration to provide a continuous assessment of ambient suspended particles. The unit counts particles in two size ranges: large and small. According to the manufacturer, large particles have diameters between 2.5 and 10 micrometers, \(\upmu \mbox{m}\) (i.e., PM10); small particles have diameters from \(0.5~\upmu \mbox{m}\) up to \(2.5~\upmu \mbox{m}\) (i.e., PM1 and PM2.5).
6.2 Field Study 2
6.2.1 Design and Procedure of Study 2
The second field experiment was conducted from September 2021 to August 2022. Similar to study 1, there was a control group and a measurement group. However, we extended the design of the field experiment by providing participants with daily feedback about their personal exposure as well as suggestions for alternative routes as a strategy to strengthen participants’ coping capacity. After signing up through our website and being allocated to a study week, participants were randomly assigned to their group. Both groups received a first questionnaire, before the measurement group was given the wearable sensor and smartphone kit. Participants in the measurement group used the sensor and smartphone for 3 days on their everyday routes. They received feedback about their exposure in the smartphone app every evening. The app allowed them to (a) see the measured levels of heat, noise, and particulate matter along the routes they had used during the day and to (b) receive an alternative route suggestion for each route they had recorded that day. These alternative route suggestions were based on a set of routing preferences optimized for low pollution and developed in collaboration with the VGI-Routing team (see Chap. 3). Participants in the measurement group were asked to fill in a short daily questionnaire after looking at their feedback and the alternative route suggestions. After their study week, both the measurement group and the control group received the link to another questionnaire. Approximately 3 to 6 months after their study week, all participants received a follow-up questionnaire (with some outliers submitting after 2 to 8.7 months).
6.2.2 Sensors Used for Measuring Environmental Stressors in Study 2
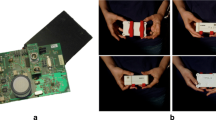
The system included a smartphone and the PAM AS520 wearable air quality monitor (www.atmosphericsensors.com), which can assess air quality in the wearer’s immediate environment. The PAM uses electrochemical cells (“Alphasense” sensors with 2 electrodes), a laser-optical particle monitor, temperature and humidity sensors, and a high-sensitivity GPS receiver and 3-axis accelerometer. A built-in microphone records ambient noise. At night, the PAM is stored in a docking station where the battery is charged. The docking station is equipped with a modem and SIM card that transmits the data stored on the device to the project’s central database for further processing (Fig. 11.2).

The sensor and smartphone kit used in Study 2 (Foto by André Künzelmann, UFZ)
6.3 The Questionnaires
Multiple questionnaires were used to assess psychological variables in our field experiments. Questionnaires of each participant were linked through an identifier code that was indicated at each measurement point. This code was also used to identify each participant’s sensor measurements and connect this information to the questionnaire data. In the first questionnaire, participants were asked for their preferred mode of transport (public transport, car, bike, or by foot) and which aspects were particularly important to them when choosing a route as a cyclist or pedestrian (e.g., speed, green space, etc.) (adapted from Ueberham et al. 2019). Participants were also asked about the stage of action they were in regarding healthy routing choices with low pollution levels (adapted from Olsson et al. 2018). To capture the main predictors of protection motivation theory (Rogers 1975, 1983), we measured health risk perception for particulate matter, noise, and heat (e.g., particulate matter, noise, and heat on my daily routes have very negative effects for my health), as well as coping appraisals regarding these three environmental stressors (e.g., I can reduce my exposure to environmental stressors in street traffic) (partly adapted from Ueberham et al. 2019). As our main dependent variable, we measured individual protection intentions to change one’s everyday routes in a way that would avoid environmental stressors (e.g., avoiding streets with a lot of car traffic). We further measured collective action intentions to fight for lower levels of environmental stressors in city traffic (e.g., by signing petitions), as well as willingness to pay for a service providing daily information on current low-pollution routes. We measured a range of other constructs in the questionnaire, including emotion-focused coping strategies that may come into play when facing a threat while coping appraisals are low (Rippetoe and Rogers 1987) and routing behavior habits when traveling to school/university, when going shopping, and during leisure time (Verplanken and Orbell 2003). Further measures included, among others, social norms (e.g., whether participants thought that others in their city were avoiding environmental stressors on everyday routes); identification with the city of Leipzig, cyclists, pedestrians, and car drivers; derogation of car drivers; general health concerns (Fahrenberg et al. 2003); and preference for technology use.
7 Results of the Field Experiments
7.1 Results Regarding the Sensor Measurements
The two field experiments (FE) were designed to monitor individual’s experiences on a trajectory based real-time (FE\({ }_{1}\); \(\Delta t=5~\mbox{sec.}\) and FE\({ }_{2}\); \(\Delta t=10~\mbox{sec.}\)) for a given population (i.e., volunteer cyclists and pedestrians) during their daily life activities. These specific conditions of personal exposure are used to develop a new perception of the spatial categories of the road network in Leipzig, where our population activities took place. The framework of the developed system includes (1) mobile sampling using low-cost air quality sensors along road segments of individual’s routes traveled (first field experiment), (2) empirically identified classes of microenvironments for road segments in Leipzig, and (3) recognition of classes developed by applying supervised machine learning (ML) models (e.g., Random Forest, RF; logistic regression, LR; support vector machines, SVM; and K-nearest neighbors, KNN). The outdoor microenvironment is categorized into three categories, each of which is virtually differentiated by buildings, road structure, traffic rate, vehicle fleet number, and driving mode with OSM-based field categories (such as highway, bicycle, and pedestrian lane), helping to reduce the multiple factors affecting personal exposure in urban data areas such as weather conditions, land use, and traffic. The three categories are (1) main, characterized by detached blocks and broad road structure, e.g., avenues, semi-continuous pollutant line source from fleet flow of vehicles with large number and high rate of dissipation, which also depends on weather conditions, i.e., wind factors; (2) secondary, spaced by linear semi-tall buildings, secondary streets (e.g., residential streets and parking areas, i.e., idle driving mode), discrete emissions from vehicle critical dual periods (i.e., daily back-and-forth movements of the workforce), and large eddy currents which counteract or reduce aerodynamic dispersal for pollutants in street canyons; and (3) green, vegetation cover, e.g., forests and parks. Several non-parametric ML algorithms were also tested with the same selected urban stressors (10 features, PM2.5, PM10, NO, NO2, O3, temperature, specific humidity, light intensity, speed, and noise) to determine which ones are suitable for our data set. The results showed that the performance difference between the individual models (RF, LG, SVM, and KNN) was significant, while RF models performed best over others, achieving >90% accuracy. Model confusion from multiple experimental samples is less than 10%, and this can be explained in terms of the following: (1) the high degree of overlap between classes is one of the main challenges affecting the accuracy of the classifier (Deberneh and Kim 2021), and (2) the developed categories are strongly coherent in a heterogeneous urban environment, so sensor response time and recording interval must also be considered when interpreting the results. In addition, the time to transfer a cyclist or pedestrian from one category to another is always much less than the response time of the sensors (Ueberham and Schlink 2018). This poses a great challenge in the crossings and adjacent parts between the three classes.
7.2 Results Regarding the Questionnaires
7.2.1 Statistical Analysis
To identify effects of our intervention, we computed linear mixed-effect models with random intercepts to estimate within-participant changes from pretest to follow-up for our outcome measures while also assessing differences between the intervention group and the control group. The mixed models included time (pretest, posttest, test after receiving exposure feedback, follow-up) as well as the group (intervention vs. control) and their interaction term to predict each outcome variable. When using an additional moderator, we entered time, group, the moderator variable, as well as the two-way and three-way interaction terms into the mixed model.
7.2.2 Results of Study 1: Descriptive Analysis
One hundred and eighty-two participants completed the pretest questionnaire, 167 participants completed the posttest questionnaire, and 121 participants completed the follow-up questionnaire. The datasets were merged based on an identifier code, generated by each participant at the start of each questionnaire, resulting in a final sample of 109 participants (N\({ }_{intervention}\) = 56, N\({ }_{control}\) = 53; 59.89% of the pretest sample). Sixty-one participants identified as female and 48 identified as male. Ages ranged from 19 to 67 years (M = 36.33, SD = 9.68). Most participants (72.5%) had a university degree. 6.4% reported having a respiratory health condition such as asthma, and 29.4% reported having allergies. Overall, participants rated their health as good (Mdn = 6 on a seven-point scale ranging from 1, very bad, to 7, very good) and reported medium levels of health concerns (M = 4.04, SD = 1.00). All scales were 7-point Likert scales. Participants rated their previous knowledge about particulate matter, heat, and noise pollution as medium (for PM, Mdn = 3; heat, Mdn = 3; noise, Mdn = 3). Satisfaction with the measurement kit was medium (Mdn = 4.5). 57.1% of the participants rated the handling of the measurement kit as at least somewhat easy, indicating that the ease of use was only medium (Mdn = 3). More than 70% reported a high or very high tracking frequency throughout the measurement phase (Mdn = 6). Participants reported that they used the tracker on typical everyday routes (Mdn = 7). More than 74% of the respondents at least somewhat agreed that wearable sensors can help people reduce their personal exposure to environmental health risks (Mdn = 5), and 63% at least somewhat agreed that wearable sensors may support behavior change aimed at reducing personal exposure (Mdn = 5). Following the individualized feedback report, participants rated their exposure to particulate matter (Mdn = 5) and noise (Mdn = 5) as medium to high while rating the heat exposure as lower (Mdn = 3.00). The feedback did not greatly differ from participants’ expectations, as participants indicated it being neither much higher nor lower than expected (PM, Mdn = 4.00; noise, Mdn = 4.00; heat, Mdn = 4.00). Participants perceived the feedback to be mostly representative for their everyday exposure (PM, Mdn = 6.00; noise, Mdn = 6.00; heat, Mdn = 5.00).
7.2.3 Results of Study 1: Mixed Model Results
For individual action intentions, results showed no significant main effects of time and group and, more importantly, no significant interaction effect of time and group. In other words, our results did not indicate that participation in the measurement group (vs. control group) would increase respondents’ action intentions to protect themselves against environmental health risks. However, results of exploratory analysis, including routing behavior habits as an additional moderator in the analysis, revealed an interesting pattern of results. First, participation in the measurement group (vs. control group) increased action intentions from pretest to posttest for respondents with weak (but not strong) routing behavior habits. This initial increase, however, was not stable throughout the intervention period. At the follow-up measurement point, we found no differences in action intentions between respondents with weak and strong routing behavior habits. For perceptions of environmental health risks, our findings indicate that participation in the measurement group (vs. control group) led to a significant increase in the perception of particulate matter health risks from pretest to posttest. Importantly, increased health risk perceptions for particulate matter were retained throughout the follow-up period, indicating a robust intervention effect. There were no intervention effects on health risk perceptions for noise and heat.
7.2.4 Results of Study 2: Descriptive Analysis
The pretest questionnaire was completed by 267 eligible participants, 225 completed the posttest questionnaire, and lastly 151 eligible participants completed the follow-up questionnaire. After matching participants’ codes, the final sample with complete data sets consisted of 136 participants (N\({ }_{intervention}\) = 67, N\({ }_{control}\) = 69; 50.9% of pretest sample). Eighty-eight participants identified as female, 45 identified as male, and three participants identified as diverse. Ages ranged from 18 to 70 years (M = 29.76, SD = 10.43). Approximately half of the respondents had a university degree. Regarding health condition, 7.4% reported a respiratory health condition such as asthma, and 27.9% reported having allergies. Overall, participants rated their health as good to very good (Mdn = 6) and reported medium levels of health concerns (M = 4.15, SD = 1.08). Satisfaction with the measurement kit was high (Mdn = 6). Approximately 85% of the participants rated the handling of the measurement kit as somewhat easy, easy, or very easy (Mdn = 2), and more than 90% reported a high or very high tracking frequency throughout the measurement phase (Mdn = 6). More than 77% of the respondents at least somewhat agreed that wearable sensors can help people reduce their personal exposure to environmental health risks (Mdn = 5), and more than 62% at least somewhat agreed that wearable sensors may support behavior change aimed at reducing personal exposure (Mdn = 5).
7.2.5 Results of Study 2: Mixed Model Results
For individual action intentions, results showed no significant interaction effect of time and group. While inspection of simple effects showed a trend indicating that participation in the measurement group (vs. control group) increased action intentions from pretest to posttest, the intervention effect was not significant. In contrast to Study 1, we found no effects of routing behavior habits on changes in action intentions. Regarding perceptions of environmental health risks, our findings indicate a robust intervention effect on perceived particulate matter risk. Specifically, results revealed that participation in the measurement group (vs. control group) led to a significant increase in perceived PM health risks from pretest to posttest. Importantly, increased levels of perceived PM health risk were retained throughout the follow-up period. For perceived heat and noise health risks, results indicate no significant treatment effects.
7.3 The Visualization and Analysis Application and Achieved Results
As part of the project, a visualization and analysis application was implemented that allows the data from the measurement campaign to be evaluated in combination with data on building structure, weather, GI, and traffic (Helbig et al. 2022). The application was implemented with the Unity Game Engine, which provides a development environment for computer games and other interactive 3D graphic applications and enables us to meet the following requirements: (1) Provide a user interface and interaction functionality, (2) performance (avoid long loading times), (3) Integrate various data sources/data types, (4) 3D visualization, (5) integrate analysis methods, and (6) presentation on PC and VR environment. By using mobile sensors within the measurement campaign of our project, we get data from two different perspectives: (1) the individual exposure to environmental stressors for a participant and (2) the distribution of environmental stressors within the urban area. In the application, methods must be provided that enable the analysis to be carried out from both perspectives. This is possible by displaying individual routes or the routes of individual participants in the 3D city model, as well as in a 2D representation. The distribution of all measurement points over the urban space can also be displayed. In addition, a hot and cold spot analysis of the distribution of the values can be carried out. The application also offers a range of functions that allow a comprehensive analysis, such as different perspectives (perspective and orthographic), showing/hiding of data layers, display of individual routes (incl. extracting GPS outliers), different coding of values (by color and/or size), chained filtering by parameters, and space-time cube visualization (Fig. 11.3).

Analysis and visualization of the trajectories of mobile sensor data
The analysis of the data with the help of the application showed that paths, especially on which many cyclists move and which also allow faster speeds due to their condition, are polluted with high nitrogen oxide levels due to their location directly on main roads. The evaluation so far also shows the temperature differences that occur between parks and heavily sealed surfaces, especially on hot days. There, the surroundings heat up strongly, especially in the second half of the day, and can be poorly ventilated with dense development at the same time.
8 Conclusions
Our study was conducted in the frame of the ExpoAware projectFootnote 1 and supported by the German Research Foundation DFG within the Priority Research Program 1894 Volunteered Geographic Information: Interpretation, Visualization and Social Computing. The research developed an integrated design that demonstrated (1) the feasibility of individuals applying advanced VGI techniques to explore the urban environmental conditions and provide useful information for city planners and officials; (2) the potential of VGI for the assessment of personal exposure that is highly relevant for adverse health effects, especially in vulnerable persons; and (3) the ability to study protective behavior of individuals and to develop actions for behavior changes and individual adaptation strategies. From our results of the urban measurements, we conclude that the proposed novel microenvironment classifications successfully reduced the complexity of urban data, and the results of the random forest models emphasized the validity of the hypothesized classification method. Nonparametric methods such as random forest are promising approaches when the model is complex and can benefit from a large number of training examples. The study also highlights the benefits and potential of low-cost sensors in categorizing street-level personal exposure in urban areas. The field experiments are an important contribution to improving the framework conditions for cycling and walking and make it more attractive. For a sustainable and resilient city, the mobility transition and thus the reduction of motorized individual transport and at the same time the promotion of active mobility are a decisive component. By integrating the results of mobile measurements into long-term planning, urban planners can reduce the level of environmental stressors in cities and better react to extreme events (e.g., heat waves) in the short term. Very short-term reactions to elevated exposure can be made by the individuals themselves. In our study, the application of personal sensors increased participants’ health risk perceptions (with regard to particulate matter) and was also able to temporarily elevate their action intentions to protect themselves against environmental health risks, albeit only for participants with weak routing habits in the first study. With the help of Unity, we were able to combine methods from 2D and 3D visualization, as well as implement analysis methods and make them available via GUI. Unity supports various platforms and enables us to use it in different contexts, ranging from PC for individual analysis to VR environments for collective analysis and presentation. We claim that our approach should be used for implementing analysis and visualization tools in future projects because (1) it has the potential to become a modular system for applications by reusing and further developing methods, (2) it enables the combination of modern 3D visualization with various analysis methods, and (3) it supports presentation in VR environments and thereby facilitates multidisciplinary, research in collaborative projects, and projects with high interdisciplinary (Helbig et al. 2022).
References
Aceves-Bueno E, Adeleye AS, Bradley D, Tyler Brandt W, Callery P, Feraud M, Garner KL, Gentry R, Huang Y, McCullough I, Pearlman I, Sutherland SA, Wilkinson W, Yang Y, Zink T, Anderson SE, Tague C (2015) Citizen science as an approach for overcoming insufficient monitoring and inadequate stakeholder buy-in in adaptive management: Criteria and evidence. Ecosystems 18(3):493–506. https://doi.org/10.1007/s10021-015-9842-4
Adams MD, Kanaroglou PS (2016) Mapping real-time air pollution health risk for environmental management: Combining mobile and stationary air pollution monitoring with neural network models. J Environ Manag 168:133–141. https://doi.org/10.1016/j.jenvman.2015.12.012
Avazpour I, Grundy J, Zhu L (2019) Engineering complex data integration, harmonization and visualization systems. J Ind Inf Integr 16:100103. https://doi.org/10.1016/j.jii.2019.08.001
Babcicky P, Seebauer S (2019) Unpacking protection motivation theory: evidence for a separate protective and non-protective route in private flood mitigation behavior. J Risk Res 22(12):1503–1521. https://doi.org/10.1080/13669877.2018.1485175
Bagagnan A, Ouedraogo I, M Fonta W, Sowe M, Wallis A (2019) Can protection motivation theory explain farmers’ adaptation to climate change decision making in the gambia? Climate 7(1):13. https://doi.org/10.3390/cli7010013
Becker AM, Marquart H, Masson T, Helbig C, Schlink U (2021) Impacts of personalized sensor feedback regarding exposure to environmental stressors. Curr Pollut Rep 7:579–593. https://doi.org/10.1007/s40726-021-00209-0
Berger M, Bill R (2019) Combining vr visualization and sonification for immersive exploration of urban noise standards. Multimodal Technol Interact 3(2):34. https://doi.org/10.3390/mti3020034
Bockarjova M, Steg L (2014) Can protection motivation theory predict pro-environmental behavior? explaining the adoption of electric vehicles in the netherlands. Glob Environ Change 28:276–288. https://doi.org/10.1016/j.gloenvcha.2014.06.010
Brooks FP (1999) What’s real about virtual reality? IEEE Comput Graph Appl 19(6):16–27. https://doi.org/10.1109/38.799723
Bryan K, Ward S, Barr S, Butler D (2019) Coping with drought: Perceptions, intentions and decision-stages of south west england households. Water Resour Manag 33(3):1185–1202. https://doi.org/10.1007/s11269-018-2175-2
Burdea GC, Coiffet Philippe (2003) Virtual reality technology. Wiley-IEEE Press, New York
Castell N, Dauge FR, Schneider P, Vogt M, Lerner U, Fishbain B, Broday D, Bartonova A (2017) Can commercial low-cost sensor platforms contribute to air quality monitoring and exposure estimates? Environ Int 99:293–302. https://doi.org/10.1016/j.envint.2016.12.007
Connolly RE, Yu Q, Wang Z, Chen YH, Liu JZ, Collier-Oxandale A, Papapostolou V, Polidori A, Zhu Y (2022) Long-term evaluation of a low-cost air sensor network for monitoring indoor and outdoor air quality at the community scale. Sci Total Environ 807(Pt 2):150797. https://doi.org/10.1016/j.scitotenv.2021.150797
Connors JP, Lei S, Kelly M (2012) Citizen science in the age of neogeography: Utilizing volunteered geographic information for environmental monitoring. Ann Assoc Am Geogr 102(6):1267–1289. https://doi.org/10.1080/00045608.2011.627058
Deberneh HM, Kim I (2021) Prediction of type 2 diabetes based on machine learning algorithm. Int J Environ Res Public Health 18(6). https://doi.org/10.3390/ijerph18063317
Defanti TA, Brown MD (1991) Visualization in scientific computing. Advances in Computers, vol 33. Elsevier, Amsterdam, pp 247–307. https://doi.org/10.1016/S0065-2458(08)60168-0. https://www.sciencedirect.com/science/article/pii/S0065245808601680
Dias D, Tchepel O (2018) Spatial and temporal dynamics in air pollution exposure assessment. Int J Environ Res Public Health 15(3). https://doi.org/10.3390/ijerph15030558
Dionisio KL, Isakov V, Baxter LK, Sarnat JA, Sarnat SE, Burke J, Rosenbaum A, Graham SE, Cook R, Mulholland J, Özkaynak H (2013) Development and evaluation of alternative approaches for exposure assessment of multiple air pollutants in atlanta, georgia. J Exposure Sci Environ Epidemiol 23(6):581–592. https://doi.org/10.1038/jes.2013.59
Dupéy LN, Smith JW (2019) Close but no cigar: how a near-miss wildfire event influences the risk perceptions and mitigation behaviors of residents who experienced a recent, nearby wildfire. https://digitalcommons.usu.edu/extension_curall/1959
Eitzel MV, Cappadonna JL, Santos-Lang C, Duerr RE, Virapongse A, West SE, Kyba CCM, Bowser A, Cooper CB, Sforzi A, Metcalfe AN, Harris ES, Thiel M, Haklay M, Ponciano L, Roche J, Ceccaroni L, Shilling FM, Dörler D, Heigl F, Kiessling T, Davis BY, Jiang Q (2017) Citizen science terminology matters: Exploring key terms. Citiz Sci Theory Pract 2(1):1. https://doi.org/10.5334/cstp.96
Elwood S, Goodchild MF, Sui DZ (2012) Researching volunteered geographic information: spatial data, geographic research, and new social practice. Ann Assoc Am Geogr 102(3):571–590. https://doi.org/10.1080/00045608.2011.595657
European Parliament (2008) Directive 2008/50/EC of the European Parliament and of the Council of 21 May 2008 on ambient air quality and cleaner air for Europe. Consolidated text: https://eur-lex.europa.eu/eli/dir/2008/50/2015-09-18
Fahrenberg J, Hampel R, Selg H (2003) Das Freiburger Persönlichkeitsinventar FPI. Hogrefe, Oxford
Fusco G, Aversano L (2020) An approach for semantic integration of heterogeneous data sources. PeerJ Comput Sci 6:e254. https://doi.org/10.7717/peerj-cs.254
Gershon N, Eick S (1995) Foreword in proc. ieee symp. information visualization, infovis 95. IEEE CS Press, Washington, DC, pp vii–viii
Giuffrida, Le Pira, Inturri, Ignaccolo (2019) Mapping with stakeholders: An overview of public participatory gis and vgi in transport decision-making. ISPRS Int J Geo-Inf 8(4):198. https://doi.org/10.3390/ijgi8040198
Goodchild MF (2007) Citizens as sensors: the world of volunteered geography. GeoJournal 69(4):211–221
Helbig C, Bilke L, Bauer HS, Böttinger M, Kolditz O (2015) Meva–an interactive visualization application for validation of multifaceted meteorological data with multiple 3d devices. PloS one 10(4):e0123811. https://doi.org/10.1371/journal.pone.0123811
Helbig C, Becker AM, Masson T, Mohamdeen A, Sen ÖO, Schlink U (2022) A game engine based application for visualising and analysing environmental spatiotemporal mobile sensor data in an urban context. Front Environ Sci 10. https://doi.org/10.3389/fenvs.2022.952725
Hinwood AL, Rodriguez C, Runnion T, Farrar D, Murray F, Horton A, Glass D, Sheppeard V, Edwards JW, Denison L, Whitworth T, Eiser C, Bulsara M, Gillett RW, Powell J, Lawson S, Weeks I, Galbally I (2007) Risk factors for increased btex exposure in four australian cities. Chemosphere 66(3):533–541. https://doi.org/10.1016/j.chemosphere.2006.05.040
Hruby F (2019) The sound of being there: Audiovisual cartography with immersive virtual environments. KN J Cartogr Geogr Inf 69(1):19–28. https://doi.org/10.1007/s42489-019-00003-5
Keil J, Edler D, Schmitt T, Dickmann F (2021) Creating immersive virtual environments based on open geospatial data and game engines. KN J Cartogr Geogra Inf 71(1):53–65. https://doi.org/10.1007/s42489-020-00069-6
Lautenschlager F, Becker M, Steininger M, Hotho A (2018) Everyaware gears: A tool to visualize and analyze all types of citizen science data. In: Burghardt D, Chen S, Andrienko G, Andrienko N, Purves R, Diehl A (eds) Proceedings of VGI Geovisual Analytics Workshop, colocated with BDVA 2018, KOPS
Lu X, Tomkins A, Hehl-Lange S, Lange E (2021) Finding the difference: Measuring spatial perception of planning phases of high-rise urban developments in virtual reality. Comput Environ Urban Syst 90:101685. https://doi.org/10.1016/j.compenvurbsys.2021.101685
Luigi M, Massimiliano M, Aniello P, Gennaro R, Virginia PR (2015) On the validity of immersive virtual reality as tool for multisensory evaluation of urban spaces. Energy Procedia 78:471–476. https://doi.org/10.1016/j.egypro.2015.11.703
Maddux JE, Rogers RW (1983) Protection motivation and self-efficacy: A revised theory of fear appeals and attitude change. J Exp Soc Psychol 19(5):469–479. https://doi.org/10.1016/0022-1031(83)90023-9
Mokas I, Lizin S, Brijs T, Witters N, Malina R (2021) Can immersive virtual reality increase respondents’ certainty in discrete choice experiments? A comparison with traditional presentation formats. J Environ Econ Manag 109:102509. https://doi.org/10.1016/j.jeem.2021.102509
Mulilis JP, Lippa R (1990) Behavioral change in earthquake preparedness due to negative threat appeals: A test of protection motivation theory. J Appl Soc Psychol 20(8):619–638. https://doi.org/10.1111/j.1559-1816.1990.tb00429.x
Nazemi M, van Eggermond MAB, Erath A, Schaffner D, Joos M, Axhausen KW (2021) Studying bicyclists’ perceived level of safety using a bicycle simulator combined with immersive virtual reality. Accid Anal Prev 151:105943. https://doi.org/10.1016/j.aap.2020.105943
Olsson LE, Huck J, Friman M (2018) Intention for car use reduction: Applying a stage-based model. Int J Environ Res Public Health 15(2). https://doi.org/10.3390/ijerph15020216
Ottinger G (2010) Buckets of resistance: Standards and the effectiveness of citizen science. Sci Technol Hum Values 35(2):244–270. https://doi.org/10.1177/0162243909337121
Pei L (2021) Green urban garden landscape design and user experience based on virtual reality technology and embedded network. Environ Technol Innov 24:101738. https://doi.org/10.1016/j.eti.2021.101738
Plotnikoff RC, Trinh L (2010) Protection motivation theory: is this a worthwhile theory for physical activity promotion? Exerc Sport Sci Rev 38(2):91–98. https://doi.org/10.1097/JES.0b013e3181d49612
Prentice-Dunn S, McMath BF, Cramer RJ (2009) Protection motivation theory and stages of change in sun protective behavior. J Health Psychol 14(2):297–305. https://doi.org/10.1177/1359105308100214
Rafiee A, van der Male P, Dias E, Scholten H (2017) Developing a wind turbine planning platform: Integration of “sound propagation model–gis-game engine” triplet. Environl Modell Softw 95:326–343. https://doi.org/10.1016/j.envsoft.2017.06.019
Rippetoe PA, Rogers RW (1987) Effects of components of protection-motivation theory on adaptive and maladaptive coping with a health threat. J Pers Soc Psychol 52(3):596–604. https://doi.org/10.1037/0022-3514.52.3.596
Robinson JA, Kocman D, Horvat M, Bartonova A (2018) End-user feedback on a low-cost portable air quality sensor system-are we there yet? Sensors (Basel, Switzerland) 18(11). https://doi.org/10.3390/s18113768
Rogers RW (1975) A protection motivation theory of fear appeals and attitude change1. J Psychol 91(1):93–114. https://doi.org/10.1080/00223980.1975.9915803
Rogers RW (1983) Cognitive and physiological processes in fear appeals and attitude change: A revised theory of protection motivation. In: Cacioppo J, Petty R (eds) Social psychophysiology. Guilford Press, New York
Rosenstock IM (1974) Historical origins of the health belief model. Health Educ Monogr 2(4):328–335. https://doi.org/10.1177/109019817400200403
Schlink U, Ueberham M (2020) Perspectives of individual-worn sensors assessing personal environmental exposure. Engineering (Beijing, China) https://doi.org/10.1016/j.eng.2020.07.023
Schmohl S, Tutzauer P, Haala N (2020) Stuttgart city walk: A case study on visualizing textured dsm meshes for the general public using virtual reality. PFG J Photogramm Remote Sens Geoinf Sci 88(2):147–154. https://doi.org/10.1007/s41064-020-00106-z
Simpson RM, LaViola JJ, Laidlaw DH, Forsberg AS, van Dam A (2000) Immersive vr for scientific visualization: a progress report. IEEE Comput Graph Appl 20(6):26–52. https://doi.org/10.1109/38.888006
Snyder EG, Watkins TH, Solomon PA, Thoma ED, Williams RW, Hagler GSW, Shelow D, Hindin DA, Kilaru VJ, Preuss PW (2013) The changing paradigm of air pollution monitoring. Environ Sci Technol 47(20):11369–11377. https://doi.org/10.1021/es4022602
Stadt Leipzig (2018) Luftreinhalteplan für die stadt leipzig - fortschreibung 2018. https://www.luft.sachsen.de/download/luft/LRP_Leipzig-2018_Fassung_14-5-2019.pdf
Stafoggia M, Oftedal B, Chen J, Rodopoulou S, Renzi M, Atkinson RW, Bauwelinck M, Klompmaker JO, Mehta A, Vienneau D, Andersen ZJ, Bellander T, Brandt J, Cesaroni G, de Hoogh K, Fecht D, Gulliver J, Hertel O, Hoffmann B, Hvidtfeldt UA, Jöckel KH, Jørgensen JT, Katsouyanni K, Ketzel M, Kristoffersen DT, Lager A, Leander K, Liu S, Ljungman PLS, Nagel G, Pershagen G, Peters A, Raaschou-Nielsen O, Rizzuto D, Schramm S, Schwarze PE, Severi G, Sigsgaard T, Strak M, van der Schouw YT, Verschuren M, Weinmayr G, Wolf K, Zitt E, Samoli E, Forastiere F, Brunekreef B, Hoek G, Janssen NAH (2022) Long-term exposure to low ambient air pollution concentrations and mortality among 28 million people: results from seven large european cohorts within the elapse project. Lancet Planet Health 6(1):e9–e18. https://doi.org/10.1016/S2542-5196(21)00277-1
Steininger M, Kobs K, Zehe A, Lautenschlager F, Becker M, Hotho A (2020) Maplur: Exploring a new paradigm for estimating air pollution using deep learning on map images. ACM Trans Spatial Algorithms Syst 6(3). https://doi.org/10.1145/3380973
Strasser BJ, Baudry J, Mahr D, Sanchez G, Tancoigne E (2019) “citizen science”? Rethinking science and public participation. Sci Technol Stud, 52–76. https://doi.org/10.23987/sts.60425
Tian C, Li G (2019) A framework for the data integration of earthquake events. IEEE Access 7:172628–172637. https://doi.org/10.1109/ACCESS.2019.2957024
Ueberham M, Schlink U (2018) Wearable sensors for multifactorial personal exposure measurements - a ranking study. Environ Int 121(Pt 1):130–138. https://doi.org/10.1016/j.envint.2018.08.057
Ueberham M, Schlink U, Dijst M, Weiland U (2019) Cyclists’ multiple environmental urban exposures - comparing subjective and objective measurements. Sustainability 11(5):1412. https://doi.org/10.3390/su11051412
van Dam A, Laidlaw DH, Simpson RM (2002) Experiments in immersive virtual reality for scientific visualization. Comput Graph 26(4):535–555. https://doi.org/10.1016/S0097-8493(02)00113-9
Verplanke J, McCall MK, Uberhuaga C, Rambaldi G, Haklay M (2016) A shared perspective for pgis and vgi. Cartogr J 53(4):308–317. https://doi.org/10.1080/00087041.2016.1227552
Verplanken B, Orbell S (2003) Reflections on past behavior: A self-report index of habit strength 1. J Appl Soc Psychol 33(6):1313–1330. https://doi.org/10.1111/j.1559-1816.2003.tb01951.x
Wang Z, Delp WW, Singer BC (2020) Performance of low-cost indoor air quality monitors for pm2.5 and pm10 from residential sources. Build Environ 171:106654. https://doi.org/10.1016/j.buildenv.2020.106654
Weißmann M, Edler D, Rienow A (2022) Potentials of low-budget microdrones: Processing 3d point clouds and images for representing post-industrial landmarks in immersive virtual environments. Front Rob AI 9:886240. https://doi.org/10.3389/frobt.2022.886240
World Health Organization (2016) Ambient air pollution: A global assessment of exposure and burden of disease 118:1–131. ISBN: 9789241511353. https://www.who.int/publications/i/item/9789241511353
Yang L, Zhang F, Kwan MP, Wang K, Zuo Z, Xia S, Zhang Z, Zhao X (2020) Space-time demand cube for spatial-temporal coverage optimization model of shared bicycle system: A study using big bike gps data. J Transp Geogr 88:102861. https://doi.org/10.1016/j.jtrangeo.2020.102861
Yang Q, Liu G, Gonella F, Chen Y, Liu C, Zhao H, Yang Z (2022) Assessing the temporal-spatial dynamic reduction in ecosystem services caused by air pollution: A near-real-time data perspective. Resour Conserv Recycl 180:106205. https://doi.org/10.1016/j.resconrec.2022.106205
Zhang RX, Zhang LM (2021) Panoramic visual perception and identification of architectural cityscape elements in a virtual-reality environment. Future Gener Comput Syst 118:107–117. https://doi.org/10.1016/j.future.2020.12.022
Acknowledgements
This research was funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation)—ExpoAware, 424979005.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2024 The Author(s)
About this chapter

Cite this chapter
Becker, A.M., Helbig, C., Mohamdeen, A., Masson, T., Schlink, U. (2024). Environmental Tracking for Healthy Mobility. In: Burghardt, D., Demidova, E., Keim, D.A. (eds) Volunteered Geographic Information. Springer, Cham. https://doi.org/10.1007/978-3-031-35374-1_11
Download citation
DOI: https://doi.org/10.1007/978-3-031-35374-1_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-35373-4
Online ISBN: 978-3-031-35374-1
eBook Packages: Computer ScienceComputer Science (R0)