
Abstract
Strong ground motions from the 2016 Mw 7.0 Kumamoto earthquake (Japan) can be well simulated based on a characterized source model consisting of strong-motion generation areas (SMGAs) with high stress drop and a background area with low stress drop, except at very near-fault stations (Irikura et al. in Earth Planets Sp 69:10, 2017). Strong ground motions observed at very near-fault stations less than 3 km away from the surface traces along the Futagawa fault zone have long-period motions including maximum permanent displacements beyond 2 m. To reproduce such long-period ground motions at those very near-fault stations, one must place SMGAs in the seismogenic zone but also add long-period-motion generation areas (LMGAs) in the weak shallow layer (SL) zone between the top of the seismogenic zone and the free surface. During the 2010 Mw 7.0 Darfield (New Zealand) earthquake, surface breaks caused by the mainshock were found associated with active faults by field surveys. Strong ground motions from the 2010 Darfield earthquake can also be simulated well using the conventional characterized source model, except for ground motions at very near-fault stations. Reproduction of very near-fault motions with permanent components for the 2010 Darfield earthquake also requires consideration of LMGAs in the SL zone. We thus propose an extension of the characterized source model by adding LMGAs in the SL zone. The parameters for the SMGAs are given following the recipe of Irikura and Miyake (Pure Appl Geophys 168:85–104, 2011), while the parameters of the LMGAs are estimated from two scaling relationships, viz. the surface displacement versus the average slip in the rupture area from the source inversion, and the surface displacement versus the rise time of the slip velocity time function in the LMGA from the forward simulation.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Strong ground motions are more closely related to regions of slip heterogeneity rather than the entire rupture area or total seismic moment (Irikura and Miyake 2011). A characterized source model for estimating strong ground motions has been proposed, consisting of one or several asperities with large slip and high stress drop and a background area with less slip and low stress drop (Miyake et al. 2003) based on source characterizations defined using slip distributions obtained from waveform inversion of strong-motion data. From studies of crustal earthquakes, we recognized that strong ground motions are mainly generated from asperities as strong-motion generation areas (SMGAs), which yield about half of the seismic moment of the entire rupture area (Somerville et al. 1999). Contributions from the background area are mostly longer-period motions to match the total seismic moment. SMGAs are principally located inside seismogenic zones in the shallow crust (Miyake et al. 2003; Irikura and Miyake 2011).
For the 2016 Mw 7.0 Kumamoto earthquake, surface breaks caused by the mainshock were found associated with the Futagawa-Hinagu fault system by field surveys. Near-fault strong motions during the earthquake were recorded with high accuracy by the National Research Institute for Earth Science and Disaster Resilience (NIED) strong-motion network (K-NET and KiK-net) and the Japan Meteorological Agency (JMA) and local-government seismic-intensity network. Mashiki Town-Hall station (93051) and Nishihara Village-Hall station (93048) are located extremely near surface breaks along the Futagawa fault zone. Strong long-period motions of more than 2 s including maximum permanent displacements beyond 2 m were observed at the very near-fault station 93048 (Iwata 2016).
The synthetic ground motions from the 2016 Kumamoto earthquake using the characterized source model and the empirical Green’s function method have been found to agree well with the observed motions in terms of acceleration, velocity, and displacement in the frequency range of 0.3–10 Hz at many stations surrounding source faults, except very near-fault stations (Irikura et al. 2017).
One of the problems in reproducing strong ground motions from the 2016 Kumamoto earthquake is that observed long-period motions with permanent displacements at the very near-fault stations are not well simulated based on the conventional characterized source model. To generate such long-period motions near fault traces, long-period-motion generation areas (LMGAs) located in a weak shallow layer (SL) zone defined as part of the crust between the top of the seismogenic zone and the free surface (Dalguer et al. 2019) must be taken into account. Similar studies have been carried out by several authors (e.g., Tanaka et al. 2018). We thus propose a new characterized source model for reproducing strong ground motions with long-period ground motions including permanent displacements near fault traces for surface fault earthquakes such as the 2016 Kumamoto earthquake.
Long-period ground motions with permanent displacements were observed at stations near surface rupture traces during the Mw 7.0 Darfield earthquake in New Zealand. This earthquake occurred on a previously unidentified fault system and generated a ~ 30-km-long surface rupture. High-accuracy measurements of coseismic displacements were obtained at over 100 localities along the Greendale fault, showing maximum displacement of 5.3 m. Strong motions were recorded with high accuracy at 17 stations near the source regions during the earthquake. The nearest stations GDLC and ROLC are located about 1 km and 3 km from the surface-fault traces.
Strong ground motions of velocity from the 2010 Darfield earthquake were also well simulated using the conventional characterized source model in terms of velocity using the wavenumber integration method in this study. To reproduce the strong-motion displacement with permanent components at the very near-fault stations, one must take into account LMGAs in the SL zone above the seismogenic zones, in common with the 2016 Kumamoto earthquake.
We thus propose an extension of the characterized source model by adding long-period-motion generation areas (LMGAs) in the SL zone above the seismogenic zone to the conventional source model. The parameters for the SMGA are given following the recipe of Irikura and Miyake (2011). We discuss herein how to estimate the parameters for the LMGAs for near-fault ground motions.
2 Data
A series of large earthquakes struck the Kumamoto area in Kyushu, the southwestern island of Japan, in April 2016. The earthquake sequence started with a Mw 6.2 foreshock (21:26, April 14, 2016, JST, Mjma 6.5) along the Hinagu fault, then the Mw 7.0 main shock (01:25, April 16, 2016, JST, Mjma 7.3) occurred partly along the northern part of the Hinagu fault and mainly along the Futagawa fault, as shown in Fig. 1. Surface ruptures appeared along the eastern part of the Futagawa fault zone and the northernmost part of the Hinagu fault zone. During this earthquake, surface breaks caused by the mainshock were found to extend about 34 km long with maximum 2.2 m offset associated with the Futagawa–Hinagu fault system by field surveys (Shirahama et al. 2016).

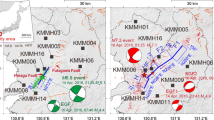
Location of surface ruptures (blue lines) associated with the 2016 Kumamoto earthquake by Shirahama et al. (2016) and near-fault strong-motion stations (inverted black triangles). Previously mapped active faults are plotted (blue lines after Nakata and Imaizumi 2002). The mainshock hypocenter (black star) is determined by the Japan Meteorological Agency
Strong ground motions from this earthquake sequence were obtained at 370 surface stations and at 328 stations on the surface and in boreholes (Suzuki et al. 2017). Near-field strong motions during the Mw 7.0 mainshock were recorded with high accuracy by the NIED strong-motion network (K-NET and KiK-net) and the JMA and local-government seismic-intensity network, as shown in Fig. 2. In particular, very near-fault ground motions were recorded at three stations: Nishihara Village-Hall station (93048) about 0.5 km away from the surface traces along the Futagawa fault, Mashiki Town-Hall station (93051) about 2 km away and KiK-net-Mashiki (KMMH16) about 2.5 km away from the rupture traces (Iwata 2016). Velocity and displacement waveforms are obtained by integration and double integration from the acceleration records after carefully removing baseline errors. The peak ground accelerations (PGAs) and peak ground velocities (PGVs) are 770 gals and 239 cm/s at 93048 and 825 gals and 177 cm/s (EW) at 93051. The observed permanent displacements are about 1.7 m in horizontal and 1.8 m sinking in vertical, respectively, at 93048 and about 1.2 m in horizontal with about 0.7 m sinking in vertical at 93051 (Iwata and Asano 2016).

Acceleration and displacement strong-motion waveforms observed at near-fault stations during the 2016 Kumamoto earthquake. PGA is written at upper right of each acceleration waveform, and permanent displacement is written at upper left of each displacement waveform
The 2010 Mw 7.0 Darfield (New Zealand) earthquake was one of the best-recorded earthquakes for earthquake surface faults and strong ground motion. This earthquake ruptured the previously unrecognized Greendale fault, as shown in Fig. 3. Surface rupturing was observed at over 100 sites along the main fault (Quigley et al. 2012). Strong ground motions were obtained at 17 stations well distributed around the epicenters and closer than 35 km. Observed acceleration seismograms were converted into velocities by integration and displacements by double integration. Acceleration and displacement waveforms at eight near-fault stations are shown in Fig. 4. GDLC is the station closest to the surface rupture trace, about 1 km away. Accelerations and displacements at GDLC are 787 gals in horizontal and 1235 gals in vertical, and 1.19 m in horizontal EW and 48 cm in vertical. The second closest station is ROLC, about 3 km away from the surface trace. Displacements at ROLC are small: 69 cm in horizontal EW and 41 cm in vertical.

Fault trace map of surface ruptures during the 2010 Darfield earthquake and location of near-fault strong-motion stations. The nearest station to the fault trace is GDLC, 1 km away. Numerals above and below the surface ruptures are horizontal and vertical offsets (Quigley et al. 2012)

Acceleration and displacement strong-motion waveforms observed at near-fault stations during the 2010 Darfield earthquake. a Acceleration, with PGA written at top of each trace. b Displacement, with permanent displacement written at top of each trace
3 Simulation of Near-Fault Ground Motions Using Characterized Source Model
Strong ground motions from crustal earthquakes have been estimated based on source characterizations defined using slip distributions obtained by waveform inversion of strong-motion data (e.g., Kamae and Irikura 1998). The slip distributions inside the rupture area are heterogeneous, having areas of large slip called asperities and areas of less slip called the background. The asperities have high stress drop and generate strong ground motions, being called strong-motion generation areas (SMGAs). Then, a characterized source model for estimating strong ground motions, consisting of one or several asperities and a background area, was proposed (Irikura and Miyake 2011).
We estimate the characterized source model by comparing the synthetic and observed ground motions from the 2016 Kumamoto and 2010 Darfield earthquakes.
3.1 Characterized Source Model of 2016 Kumamoto Earthquake
Many studies of slip distributions in source faults obtained by waveform inversion of strong-motion data for this event have already been published (e.g., Asano and Iwata 2016; Kubo et al. 2016a, b; Yoshida et al. 2017). Irikura et al. (2017) simulated the ground motions from two different source models with strong-motion generation areas (SMGAs) based on waveform inversion results using the empirical Green’s function (EGF) method. One is a three-segment fault model with three SMGAs (one in each segment), based on the inversion result obtained by Yoshida et al. (2016). The other is a single-segment model with an SMGA based on the inversion result of Kubo et al. (2016a). They successfully simulated short-period ground motions from the 2016 Kumamoto earthquake using both models mentioned above (Irikura et al. 2017). This indicates that the characterized source models for estimating ground motions based on SMGAs are very robust, because simulated short-period motions do not change much, even if the locations of SMGAs differ somewhat between models, as long as the combined areas of SMGAs are almost the same. However, using those characterized source models, we cannot simulate the long-period ground motions observed at very near-fault stations such as 93048 (Nishihara Village-Hall) and 93051 (Mashiki Town-Hall).
To discuss the differences between the observed and synthetic motions in detail, we reconstruct the characterized source model with only SMGAs using numerical Green’s functions. Velocity ground motions are numerically simulated using the discrete wavenumber method (Bouchon 1981) with the reflection and transmission matrix method (Kennett and Kerry 1979) to enable reliable calculation of longer-period motions.
We assume model K1, consisting of only SMGAs in the Futagawa fault segment, based on the inversion result obtained by Kubo et al. (2016a, b), shown as slip distribution in Fig. 5. A one-dimensional velocity structure model is examined for each station (Fig. 6), considering the depth at which the sensor is installed.

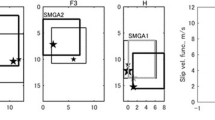
Map projection of total slip distribution by Kubo et al. (2016b) and two SMGAs (SMGA1 and SMGA2, rectangles) of model K1. Star denotes the rupture starting point. Sky-blue and gray circles denote the hypocenters of aftershocks (M ≥ 1) 1 day and 1 month after the M 7.3 event, respectively, which were determined by the NIED Hi-net. Circle sizes indicate event magnitudes. Inverted triangles denote observed stations used in the analysis

1D velocity structure near 93051 (Mashiki Town-Hall) and 93048 (Nishihara Village-Hall)
The best-fit model between synthetic and observed ground motions is model K1 (Fig. 5), which consists of two SMGAs (SMGA1 and SMGA2). The synthetic velocity motions obtained as the sum of the contributions of SMGA1 and SMGA2 to ground motions agree well with the observed ones at six stations at intermediate fault distance (JMAEEB, KMMH14, KMM005, KMMH03, and KMMH06 in Fig. 5, and KMM003 in Fig. 9) more than 3 km away from the fault traces, as shown in Fig. 7a. Source parameters for the two SMGAs of model K1 are presented in Table 1. On the other hand, synthetic velocity motions at five near-fault stations, viz. 93051 (Nishihara), 93048 (Mashiki), KMMH16, 93011 (Kawayo), and JR-Tateno, obtained using model K1 are clearly underestimated for long-period motions of more than 2 s compared with the observed ones, as shown in Fig. 7b.

Observed and synthetic velocity ground motions of three components (NS, EW, and UD). Observed (black) motions for model K1 are compared with synthetic (red, all from SMGAs) contributions from SMGA1 (blue) and SMGA2 (gray). Parameters of model K1 are presented in Table 1. The available frequency range is less than 1 Hz. a Comparison between observed and synthetic motions at stations at intermediate fault distances (more than 3 km). b Comparison between observed and synthetic ground motions at near-fault stations (less than 3 km)
We thus propose a new characterized model, adding long-period-motion generation areas (LMGAs) in the SL zone over the seismogenic zone in Fig. 8 (left). The slip velocity time function inside the LMGA is defined to be a smoothed ramp function with a certain duration, while that inside the SMGA is a Kostrov-like function developed by Nakamura and Miyatake (2000) in Fig. 8 (right). Ground motions generated from the LMGA have only longer-period motions, while those from the SMGAs have abundant shorter-period motions.

Left: illustration of extended characterized source model consisting of SMGA, LMGA, and background area. Right: slip velocity time functions on SMGA and LMGA. Red line is a function with rise time of 1.6 s for SMGA given by Nakamura and Miyatake (2000); blue line is one with rise time of 2.5 s for LMGA given by a smoothed ramp
The long-period ground motions including permanent displacement are simulated using a new characterized source model with SMGAs and LMGAs in which the Green’s functions are estimated by the wavenumber integration method for calculating ground motions in layered half-space media (Hisada and Bielak 2003). This method has the particular advantage of being able to simulate ground motions at near-fault stations due to surface faulting with static offset in the formulation because of the removal of near-source singularities by separating the static and dynamic Green’s functions.
We find three distinct LMGAs in the SL zone above the seismogenic zone through a trial-and-error procedure to reproduce long-period motions observed at six near-fault stations, viz. 93051 (Mashiki), 93048 (Nishihara), KMMH16, KMM005, 93011 (Kawayo, Southern-Aso-Village), and JR-Tateno, as shown in Fig. 9. Source parameters for the three LMGAs of model K2 are presented in Table 2. The slip time function is given by a smoothed ramp function with duration of 2.5 s. Ground motions generated from the LMGAs have weak amplitudes at short periods but rich amplitudes at long periods, including permanent displacements, being consistent with the observed motions in Fig. 10. The locations of those three LMGAs are compared with slip distributions obtained from inversion analysis of strong-motion data (Kubo et al. 2016b) and Interferometric Synthetic Aperture Radar (InSAR) data (Fukahata and Hashimoto 2016) in Figs. 11 and 12. The locations of the LMGAs are consistent with large slip near surface inside the source fault.

Left: map view of extended characterized source model (model K2) with two SMGAs (SMGA1 and SMGA2) and three LMGAs (LMGA1, LMGA2, and LMGA3). Right: extended characterized source model (model K2) projected on the fault plane with two SMGAs and three LMGAs. The hypocenter of the mainshock (closed black star), the rupture starting point (open black star) of each SMGA and LMGA, and observation stations (inverted triangles) are indicated

Comparison of observed and synthetic ground motions (velocity and displacement) generated from three LMGAs of model K2 at near-fault stations 93051 (Mashiki Town Hall), 93048 (Nishihara Village Hall), KMMH16 (KiK-net Mashiki surface), KMM005 (Ohzu), 93011 (Minamiaso Kawayo), and JR Tateno. Observed (black), synthetic (red, sum of contributions from SMGAs and LMGAs), contribution from the SMGAs (blue), and contributions from the LMGAs are shown from top to bottom in each trace

Comparison of locations of SMGAs and LMGAs of model K2 with slip distribution from waveform inversion of strong-motion data. Two SMGAs (red rectangles) and three LMGAs (blue rectangles) are added in this study to the slip distribution of Kubo et al. (2016b)

Comparison of locations of SMGAs and LMGAs of model K2 with slip distribution from inversion of InSAR data. Two SMGAs (red rectangles) and three LMGAs (blue rectangles) in this study are added to the slip distribution of Fukahata and Hashimoto (2016)
A curious point is that the estimated LMGAs are placed only quite near the strong-motion stations. This is probably because the ground motions with permanent displacements attenuate rapidly with distance from the fault traces, r, as order of (1/r2) as indicated by Hisada and Bielak (2003). If densely arrayed stations were available there, the number and places of the LMGAs could be correctly estimated. However, there are a very limited number of stations along the fault traces.
We now try to examine whether the three distinct LMGAs of model K2 can reproduce the distribution of surface displacements derived from Advanced Land Observing Satellite-2/Phased Array type L-band Synthetic Aperture Radar-2 (ALOS-2/PALSAR-2) pixel-offset data estimated by Himematsu and Furuya (2016).
For comparison, we consider another model (model K3) obtained by joining the three distinct LMGAs together, with the source parameters presented in Table 3.
The observed surface displacements from the InSAR data (shown by background color) and the calculated ones (shown by colors of inverted triangles) for model K2 and model K3 are compared in Fig. 13. First, the displacements calculated from model K2 with the three discrete LMGAs are compared with the observed displacements in Fig. 13 (left). We find that the displacements calculated from model K2 in areas sandwiched between LMGAs are clearly smaller than those observed by InSAR in Fig. 13 (left), while the displacements calculated from model K3 in areas in the vicinity of the LMGAs are comparable to the observed ones in Fig. 13 (right). The displacements calculated from model K3 are consistent with the observed InSAR data.

Comparison between observed EW displacement distribution (background colors) and ALOS-2/PALSAR-2 pixel-offset data of Himematsu and Furuya (2016), and calculated displacements denoted by colors of inverted triangles at calculation points obtained by using model K2 and model K3. Left: calculation for model K2 with three distinct LMGAs. Right: calculation for model K3 with a single long LMGA
A comparative study of the displacements calculated from model K2 with the three distinct LMGAs and those obtained using model K3 with a single long LMGA is shown in Fig. 14, revealing that the displacement distributions calculated from model K3 are much more easily explained than those obtained using model K2.

Spatial distribution of surface displacements (EW component) calculated using model K2 and model K3. Left: calculation for model K2 with three LMGAs. Right: calculation for model K3 with a single long LMGA
Finally, we confirm that the synthetic ground motions (velocity and displacement) calculated from model K3 agree well with the observed ground motions at near-fault stations in Fig. 15, which also shows the performance of synthetic ground motions obtained from two SMGAs, a single long LMGA, and a background for model K3. The observed motions and the synthetic motions as a sum of the SMGAs, LMGA, and background area are drawn by black and red lines, respectively. The contributions from the SMGAs, LMGA, and background area are also drawn separately by blue, green, and gray lines, respectively.

Comparison of observed ground motions and synthetic ones of three components for model K3 at six near-fault stations (93051, 93048, KMMH16, KM005, 93011, and JR-Tateno). Observed (black), synthetic (red, total sum of contributions from a long LMGA, two SMGAs, and a background), contribution from the SMGAs (blue), contribution from the LMGA (green), and contribution from the background (gray) are shown from top to bottom in each trace. a Velocity motions, with PGV of observed (black numeral) and synthetic motion (red numeral) shown at top of each trace. b Displacement motions, with permanent displacement of observed (black numeral) and synthetic motion (red numeral) shown at top of each trace
The long-period motions and permanent displacements at a very near-fault station (93048, about 0.5 km away from the fault traces) are controlled by the contributions only from the LMGA but almost not influenced by other terms such as the SMGAs or background area. The ground motions at near-fault stations (93051, KMMH16, JR-Tateno, and 93011, 2–4 km away from the fault traces) are mainly controlled by the LMGA in the long-period range of more than 2 s and slightly influenced by SMGAs in the shorter-period range. On the other hand, the ground motions at KMM005 (more than 5 km away from the fault traces) require consideration of the contributions from the background area in the long-period range as well as the LMGA and SMGAs in the short-period range. The contribution from the background area to the long-period ground motions becomes relatively greater as the distance from fault traces increases. The results show that the contribution from the LMGA to the long-period velocity motions at KMM005 is almost on the same order as that from the SMGAs, and the contribution from the LMGA to the permanent displacements is almost on the same order as that from the background area.
3.2 Characterized Source Model of 2010 Darfield Earthquake
The 2010 Mw 7.0 Darfield (New Zealand) earthquake struck the Canterbury Plain region of New Zealand’s South Island on September 4, 2010. Surface rupturing has been observed at west, central, and east segments with maximum offset of 5.3 m at the central segment on a previously unidentified fault system by field surveys. The fault system is named the Greendale fault (Quigley et al. 2012), as shown in Fig. 3.
The aftershocks occurring at depth shallower than 30 km in the first 1 month after the mainshock are plotted by colored dots (Holden and Beavan 2012) in Fig. 16. The shallow aftershocks distribute along the fault system (Gledhill et al. 2000). The hypocenter of the mainshock is about 4 km north of the fault system. Strong motions during the earthquake were recorded with high accuracy at 17 stations near the source regions.

Map projection of characterized source model (model D1) with three SMGAs (red rectangles) along the Greendale fault (blue rectangles) for 2010 Darfield earthquake (Mw 7.0). Locations of strong-motion stations are denoted by solid triangles, and projections of aftershocks are marked by dots whose color corresponds to hypocentral depth
The slip distribution on fault planes along the Greendale fault during this earthquake was obtained by Hayes (2010) using waveform inversion of Global Seismographic Network (GSN) broadband data and teleseismic data, moving the hypocenter to the south to align with the surface trace of the mapped rupture in the inversion analysis. We assume a simplified source model in this study based on the inversion result of Hayes (2010), as shown by black rectangles in Fig. 16. The model is composed of three strike-slip planar segments (west, central, and east) with different strike (central and east N85°E, west N307°E) and the same dip angle (82°). Each segment has an SMGA, and a total of three SMGAs are assumed (Fig. 17). The source parameters of the SMGAs are presented in Table 4. The one-dimensional velocity structure model shown in Fig. 18 was proposed by Guidotti et al. (2011).

Characterized source model (model D1) with three SMGAs (SMGA1, SMGA2, and SMGA3) along the Greendale fault consisting of central, east, and west segments for 2010 Darfield earthquake

1D velocity structure in basin near source region of 2010 Darfield earthquake (Guidotti et al. 2011)
The starting point of SMGA1 in our model is initially located at the point set by Hayes (2010). We then relocate it by trial and error to fit the synthetic motions to the observed ones. The rupture inside SMGA1 propagates radially from the starting point. The starting points in SMGA2 and SMGA3 are determined at the points where the rupture inside SMGA1 first reaches SMGA2 or SMGA3 (Fig. 17). The ruptures in SMGA2 and SMGA3 propagate radially from the starting points.
Ground motions of velocity and displacement are simulated using model D1 with three SMGAs and numerical Green’s functions calculated by the wavenumber integration method (Hisada and Bielak, 2003). We find that the synthetic velocity motions from those three SMGAs successfully reproduce the observed motions in Fig. 19. On the other hand, the synthetic displacement motions from the SMGAs have smaller amplitudes compared with the observed ones, as shown in Fig. 20 (left). Permanent displacements obtained from synthetic displacements seem to be systematically smaller than the observed ones in Fig. 20 (right). In particular, the displacements at GDLC (the fourth waveforms from above), the station closest to rupture fault traces, have markedly smaller amplitudes compared with the observation.

Comparison of observed (black) and synthetic (red) velocity ground motions from SMGAs of three components (NS, EW, and UD) at near-fault stations for model D1. PGVs of observed and synthetic motions are written in black and red numerals, respectively, at top of each trace. The available frequency range is less than 0.5 Hz

Left: observed (black) and synthetic (red) displacements from SMGAs at near-fault stations for model D1 for 2010 Darfield earthquake. Permanent displacements of observed and synthetic motions are written in black and red numerals, respectively, at top of each trace. Right: comparison between observed and synthetic displacements
An extended characterized source model (model D2), obtained by adding four LMGAs in the SL zones from the fault surface down to the top of the seismogenic zone to model D1 (Fig. 17), is proposed in Fig. 21. The source parameters of model D2 are presented in Table 5. The rake angles of slips of LMGA1, LMGA2, and LMGA3 are assumed to be the same as those of SMGA1, SMGA2, and SMGA3, respectively, and those of LMGA4 are the same as LMGA2 next to LMGA4. The agreement between the synthetic and observed displacement motions for model D2 is improved compared with model D1, as shown in Fig. 22 (left). The permanent displacements obtained from synthetic displacements seem to be slightly smaller than the observed ones in Fig. 22 (right).

Upper: map view of extended characterized source model (model D2 and D3) with three SMGAs and four LMGAs. Lower: planar projection of characterized source model

Left: comparison of observed and synthetic ground motions (displacement) from LMGAs at near-fault stations from extended characterized model (model D2). Permanent displacements of observed and synthetic motions are written in black and red numerals, respectively, at top of each trace. Right: comparison between observed and synthetic displacements
Therefore, we modified model D2 to model D3, changing only rake angles of LMGAs to better fit the synthetic to the observed displacement motions. The source parameters of model D3 are presented in Table 6. Both of the synthetic displacement waveforms and permanent displacements agree well with the observed ones shown in Fig. 23 (left and right). In particular, the synthetic displacements at GDLC (the fourth waveforms from above), the station closest to rupture fault traces, are consistent with the observed one in terms of amplitude and phase.

Left: comparison of observed and synthetic ground motions (displacement) at near-fault stations from extended characterized model (model D3). Permanent displacements of observed and synthetic motions are written in black and red numerals, respectively, at top of each trace. Right: comparison between observed and synthetic displacements
4 Extension of Characterized Source Model
Remarkable long-period motions with permanent displacements were observed at very near-fault stations during the 2016 Kumamoto earthquake in Japan and the 2010 Darfield earthquake in New Zealand. We are not able to evaluate those long-period ground motions using the conventional characterized source model consisting of SMGAs in the seismogenic zone and a background area as proposed by Irikura and Miyake (2011). However, we successfully simulate the long-period ground motions at very near-fault stations by modifying the conventional source model by the addition of long-period-motion generation areas (LMGAs) in the SL zone above the seismogenic zone.
We then construct a recipe to extend the characterized source model to enable simulation of the ground motions including the near-fault ground motions. The procedure to predict strong ground motions in the conventional recipe is based on two kinds of scaling relationship: One is a scaling relationship for outer fault parameters, such as the seismic moment, faulting area, and average stress drop of the entire faulting area; The other is the scaling relationships for inner fault parameters inside the source fault, such as the area and stress drop of asperities. Once the faulting area for a target earthquake is given, the seismic moment and average stress drop of the earthquake can be inferred, then the combined area and stress drop of asperities can be estimated, thus determining almost all the parameters necessary to calculate strong ground motions. For crustal earthquakes, the asperities are regarded as SMGAs (Irikura and Miyake 2011).
We then extend the characterized source model to predict near-fault strong ground motions, preserving the procedures for estimating the outer and inner fault parameters. The only modification is how the fault parameters related to the LMGAs are inferred. To do that, some scaling relationships for LMGA-related parameters are examined, although detailed discussion remains difficult.
One of the most important parameters for an LMGA is its maximum slip. In this study, the maximum slip of the LMGA is 4 m for the 2016 Kumamoto earthquake in Table 3 and 3 m for the Darfield earthquake in Table 5. The maximum slip of the LMGA corresponds to the surface displacement Dsurf in Murotani et al. (2015). The relation between the observed maximum surface displacement Dsurf and the subsurface slip Dsub_ave from source inversion analysis is shown in Fig. 24, revealing that Dsurf is two to three times larger than Dsub_ave. The average subsurface slip Dsub_ave is estimated to be 1.8 m for the 2016 Kumamoto earthquake by Yoshida et al. (2017) and 1.0 m for the 2010 Darfield earthquake. We find that the relations for the LMGAs coincide reasonably well with the scaling relation of Murotani et al. (2015).

Relation between Dsub-ave (average slip) obtained from source inversion and Dsurf (maximum surface slip) obtained from surface earthquake fault. Relations for 2016 Kumamoto earthquake (Mw 7.0) and for 2010 Darfield earthquake (Mw 7.0) are added to results of Murotani et al. (2015)
Some other problems remain for discussion. We take four issues into account. First is the difference between the maximum surface slip of the LMGA and the maximum fault offset of the field survey. The maximum surface slip of the LMGA is 4 m, while the maximum fault offset from the field survey is 2.2 m, just after the mainshock of the Kumamoto earthquake (Shirahama et al. 2016). The former is very reasonable, because the maximum permanent displacement on the ground surface from strong-motion data at the very near-fault station 93048 (Nishihara) is about 2 m and the surface fault displacement is about twice as large as the ground displacement. The surface fault displacement obtained from InSAR is 3.5 m close to the maximum surface slip determined by comparison between the observations and simulations in this study. The latter, i.e., the observed fault offset of 2.2 m, seems to be too small. Surface offsets measured in field surveys might be strongly influenced by local site effects near the surface. Further investigation is required to determine why the fault offsets during the 2016 Kumamoto earthquake are too small.
The second issue is the rise time of the slip velocity time function in the LMGA. We assume a smoothed ramp function with an appropriate rise time. The rise times of the LMGAs for the best-fit models are given as 2.5 s in Table 2 for the 2016 Kumamoto earthquake and 4.0 s in Table 4 for the Darfield earthquake. The rise time may be related to the width of the LMGA and the rupture velocity inside the LMGA. If so, there should be no difference between the 2016 Kumamoto and 2010 Darfield earthquakes. Recently, Tanaka et al. (2018) proposed some scaling relations for the rise time of the slip velocity time function versus the maximum surface slip of the LMGA, assuming the regularized Yoffe function of Tinti et al. (2005). The rise time of the LMGA model in this study roughly coincides with the rise time of Tanaka et al. (2018), while the slip of Tanaka et al. (2018) is equivalent to the slip of the LMGA in this study. However, we have no physics-based relationships for the rise time yet.
The third issue is the length and width of the LMGA. To model the LMGAs for a target earthquake, the following parameters are required for each fault segment: Lb (length of LMGA), Wb (width of LMGA), Db (maximum slip of LMGA), and Tb (rise time of slip velocity time function). For the parameters mentioned above, Wb is given as the width between the surface and the top of the seismogenic zone, Db is given as the maximum slip from the Dsurf versus Dsub_ave relation, and Tb is given as the relation of Tanaka et al. (2018). However, we do not know how to model Lb, although Lb is presumed to be less than the entire length of the rupture area.
The length of the LMGA of the best-fit model for the 2016 Kumamoto earthquake is 20 km on the side of the Futagawa fault system. The total length of the rupture area is 54 km for the 2016 Kumamoto earthquake, viz. 36 km in the Futagawa segment of the Futagawa fault zone and 18 km in the Hinagu fault zone, according to the inversion analysis of Kubo et al. (2016a, b). The rupture area mentioned above is estimated using the trimming criterion of Somerville et al. (1999) with the slip model from the waveform inversion. The ratio of the LMGA length to the rupture-area length in the Futagawa segment is around 60%.
Surface ruptures of approximately 34 km in total appeared just after the earthquake, viz. 28 km in the Futagawa fault zone and 6 km in the Hinagu fault zone (Shirahama et al. 2016). The long-period ground motions near the fault are generated by main ruptures during the earthquake, while almost none are caused by minor ruptures. The main ruptures along the Futagawa fault zone exceeding 0.8 m are about 20 km in total, consistent with the length of the LMGA. On the other hand, there were no main ruptures of more than 0.8 m in the Hinagu fault zone during the earthquake.
The length of the LMGA of the best-fit model for the 2010 Darfield earthquake is 33 km along the Glendale fault. The total length of the rupture area is 60 km according to the inversion analysis by Hayes (2010). The trimming is done using the same criterion as for the 2016 Kumamoto earthquake. The ratio of the LMGA length to the rupture-area length of the Darfield earthquake is around 60%. The main rupture during the earthquake, exceeding 0.8 m along the Greendale fault, is about 20 km (Quigley et al. 2012).
Similar studies have been done for fault displacement hazard analysis. Petersen et al. (2011) presented regression analysis of the rupture displacement on the principal fault. The rupture displacements for a strike-slip earthquake on the principal fault are very scattered but generally largest near the middle of the fault and fall off rapidly along the 25–30% of the length towards the end of the rupture. This means that the main ruptures with major displacements occur along 70–75% of the total rupture length. The ratio of the LMGA length to the total rupture length in this study is slightly less than the ratio of the main rupture length to the total rupture length given by Petersen et al. (2011).
The fourth issue is the influence of the LMGAs on the total seismic moment for predicting long-period ground motions of future earthquakes. The ratio of the seismic moment from the LMGA to that of the total seismic moment is about 11% for the 2016 Kumamoto earthquake and about 16% for the 2010 Darfield earthquake in this study. These ratios are relatively small compared with the variance of the seismic moment obtained from the scaling relationships of seismic moment versus rupture area. The contribution of the LMGA to the total seismic moment may be negligible because there is much greater variance in the scaling relationship of seismic moment versus rupture area.
5 Conclusions
For the 2016 Mw 7.0 Kumamoto earthquake, surface breaks caused by the mainshock were found associated with the Futagawa–Hinagu fault system by field surveys. We confirm that ground motions from the 2016 Mw 7.0 Kumamoto earthquake can be simulated from the conventional characterized source model consisting of strong-motion generation areas (SMGAs) based on the empirical Green’s function (EGF) method and the numerical Green’s function method except for very near-fault stations. Locations and areas of SMGAs were determined inside the seismogenic zone deeper than 3 km by comparison between the synthetic ground motions and observed motions. Long-period ground motions of more than 2 s observed at very near-fault stations such as 93048 (Nishihara Village-Hall), 93051 (Mashiki Town-Hall), and KMMH16 (Mashiki-KiK-net station) are well reproduced by adding long-period-motion generation areas (LMGAs) in the shallow layer (SL) zone from the fault surface down to a certain depth above the seismogenic zone into the conventional source model.
During the 2010 Mw 7.0 Darfield (New Zealand) earthquake, surface breaks caused by the mainshock were found associated with previously unidentified active faults by field surveys. Strong ground motions from the 2010 Darfield earthquake are also simulated well by using the conventional characterized source model except ground motions at very near-fault stations. Reproduction of very near-fault motions with permanent components for the 2010 Darfield earthquake also needs to take into account LMGAs in the SL zone.
We thus propose an extension of the characterized source model by taking into account the long-period-motion generation areas (LMGAs) from the fault surface down to a certain depth above the seismogenic zone. When the extended characterized source model is set for strong-motion prediction of a target earthquake, the procedures for estimating the outer and inner fault parameters are preserved for the SMGAs. To model LMGAs for the target earthquake, Lb (length of LMGA), Wb (width of LMGA), Db (maximum slip of LMGA), and Tb (rise time of slip velocity time function) are systematically given using empirically derived formula such as the Dsurf versus Dsub_ave (Murotani et al. 2015), Tb versus Dsurf (Tanaka et al. 2018), and some other relations.
References
Asano, K., & Iwata, T. (2016). Source rupture processes of the foreshock and mainshock in the 2016 Kumamoto earthquake sequence estimated from the kinematic waveform inversion of strong motion data. Earth, Planets and Space,68, 147. https://doi.org/10.1186/s40623-016-0519-9.
Bouchon, M. (1981). A simple method to calculate Green’s function for elastic layered media. Bulletin of the Seismological Society of America,71, 959–971.
Dalguer, L. A., Wu, H., Matsumoto, Y., Irikura, K., Takahama, T., & Tonagi, M. (2019). Development of dynamic asperity models to predict surface fault displacement caused by earthquakes. Pure and Applied Geophysics. https://doi.org/10.1007/s00024-019-02255-8. (This issue).
Fukahata, Y., & Hashimoto, M. (2016). Simultaneous estimation of the dip angles and slip distribution on the faults of the 2016 Kumamoto earthquake through a weak nonlinear inversion of InSAR data. Earth, Planets and Space,68, 204.
Gledhill, K., Ristau, J., Reyners, M., Fry, B., & Holden C. (2000). The Darfield (Canterbury) Earthquake of September 2010: Preliminary seismological report. Bulletin of the New Zealand Society for Earthquake Engineering, 43, 215–221.
Guidotti, R., Stupazzini, M., Smerzini, C., Paolucci, R., & Ramieri, P. (2011). Numerical study on the role of basin geometry and kinematic seismic source in 3D ground motion simulation of the 22 February 2011 Mw 6.2 Christchurch earthquake. Seismological Research Letters,82, 767–782.
Hayes. (2010). Updated result of the Sep 3, 2010 Mw 7.0 Darfield, South Island New Zealand Earthquake, USGS Earthquake Hazard Program. http://earthquake.usgs.gov/earthquakes/eqinthenews/2010/us2010atbj/finite_fault.php.
Himematsu, Y., & Furuya, M. (2016). Fault source model for the 2016 Kumamoto earthquake sequence based on ALOS-2/PALSAR-2 pixel-offset data: Evidence for dynamic slip partitioning. Earth, Planets and Space,68, 169. https://doi.org/10.1186/s40623-016-0545-7.
Hisada, Y., & Bielak, J. (2003). A theoretical method for computing near-fault ground motions in layered half-spaces considering static offset due to surface faulting, with a physical interpretation of fling step and rupture directivity. Bulletin of the Seismological Society of America,93, 1154–1168.
Holden, C., & Beavan, J. (2012). Source studies of the ongoing (2010–2011) sequence of recent large earthquakes in Canterbury. In Proceedings of 15th world conference of earthquake engineering, Lisboa.
Irikura, K., & Miyake, H. (2011). Recipe for predicting strong ground motion from crustal earthquake scenarios. Pure and Applied Geophysics,168, 85–104.
Irikura, K., Miyakoshi, K., Kamae, K., Yoshida, K., Somei, K., Kurahashi, S., et al. (2017). Applicability of source scaling relations for crustal earthquakes to estimation of the ground motions of the 2016 Kumamoto earthquakes. Earth, Planets and Space,69, 10. https://doi.org/10.1186/s40623-016-0586-y.
Iwata, T. (2016). Analysis of strong-motion-records at Miyazono station, Mashiki Town, and Komori station, Nishihara Village, from the mainshock of the 2016 Kumamoto earthquake, April 28, 2016 (Ver. 2), http://sms.dpri.kyoto-u.ac.jp/topics/masiki-nishihara0428ver2.pdf.
Iwata, T., & Asano, K. (2016). Near-Fault Strong Ground Motions during the 2016 Kumamoto, Japan, Earthquake, AGU Fall General Assembly 2016, abstract id. S53B-2867.
Kamae, K., & Irikura, K. (1998). Source model of the 1995 Hyogo-ken Nanbu earthquake and simulation of near-source ground motion. Bulletin of the Seismological Society of America,88, 400–412.
Kennett, B. L. N., & Kerry, N. J. (1979). Seismic waves in a stratified half space. Geophysical Journal of Royal Astronomical Society,57, 557–583.
Kubo, H., Suzuki, W., Aoi, S., & Sekiguchi, H. (2016a). Rupture process of the Mj 7.3, April 16, mainshock of the 2016 Kumamoto earthquake obtained from strong-motion data. http://www.kyoshin.bosai.go.jp/kyoshin/topics/Kumamoto_20160416/inversion_v2/index_en.html.
Kubo, H., Suzuki, W., Aoi, S., & Sekiguchi, H. (2016b). Source rupture processes of the 2016 Kumamoto, Japan, earthquakes estimated from strong-motion waveforms. Earth, Planets and Space,68, 161. https://doi.org/10.1186/s40623-016-0536-8.
Miyake, H., Iwata, T., & Irikura, K. (2003). Source characterization for broadband ground-motion simulation: Kinematic heterogeneous source model and strong motion generation area. Bulletin of the Seismological Society of America,93, 2531–2545.
Murotani, S., Matsushima, S., Azuma, T., Irikura, K., & Kitagawa, S. (2015). Scaling relations of source parameters of earthquakes occurring on inland crustal mega-fault systems. Pure Applied Geophysics,172, 1371–1381. https://doi.org/10.1007/s00024-014-1010-9.
Nakamura, H., & Miyatake, T. (2000). An approximate expression of slip velocity time functions for simulation of near-field strong ground motions. Zisin,53, 1–9. (In Japanese with English abstract).
Nakata, T., & Imaizumi, T. (2002). Digital active fault map of Japan. University of Tokyo Press, Tokyo, 1 sheet, and 2 DVDs.
Petersen, M. D., Dawson, T. E., Chen, R., Cao, T., Wills, C. J., Schwarz, D. P., et al. (2011). Fault displacement hazard for strike-slip faults. Bulletin of the Seismological Society of America,101, 805–825.
Quigley, M., Van Dissen, R., Litchfield, N., Villamor, P., Duffy, B., Barrell, D., et al. (2012). Surface rupture during the 2010 Mw 7.0 Darfield (Canterbury) earthquake: Implications for fault rupture dynamics and seismic-hazard analysis. GEOLOGY,40–1, 55–58. https://doi.org/10.1130/g32528.1.
Shirahama, Y., Yoshimi, M., Awata, Y., Maruyama, T., Azuma, T., Miyashita, Y., et al. (2016). Characteristics of the surface ruptures associated with the 2016 Kumamoto earthquake sequence, central Kyushu, Japan. Earth, Planets and Space,68, 191. https://doi.org/10.1186/s40623-016-0559-1.
Somerville, P., Irikura, K., Graves, R., Sawada, S., Wald, D., Abrahamson, N., et al. (1999). Characterizing crustal earthquake slip models for the prediction of strong ground motion. Seismological Research Letters,70, 59–80.
Suzuki, W., Aoi, S., Kunugi, T., Kubo, H., Morikawa, N., Nakamura, H., et al. (2017). Strong motions observed by K-NET and KiK-net during the 2016 Kumamoto earthquake sequence. Earth, Planets and Space,69, 19. https://doi.org/10.1186/s40623-017-0604-8.
Tanaka, S., Kaneda, J., Hikima, K., & Hisada, Y. (2018). Characterized fault model for prediction of long-period ground motions containing permanent displacement in the near-fault region. Journal of Structural Construction Engineering, Architectural Institute of Japan,83–752, 1525–1535.
Tinti, E., Fukuyama, E., Piatanesi, A., & Cocco, C. (2005). A kinematic source-time function compatible with earthquake dynamics. Bulletin of the Seismological Society of America,95, 1211–1223. https://doi.org/10.1785/0120040177.
Yoshida, K., Miyakoshi, K., & Somei, K. (2016). Kinematic source model of the 2016 Kumamoto earthquake (Mj 7.3) inverted from strong motion records (ver. 2). (In Japanese with English title). Fall meeting of 2016 Seismological Society of Japan, S15–P02.
Yoshida, K., Miyakoshi, K., Somei, K., & Irikura, K. (2017). Source process of the 2016 Kumamoto earthquake (Mj7.3) inferred from kinematic inversion of strong-motion records. Earth, Planets and Space,69, 64. https://doi.org/10.1186/s40623-017-0649-8.
Acknowledgements
Strong motion data from K-NET, KiK-net, and F-net were provided by the National Research Institute for Earth Science and Disaster Resilience (NIED), Japan. The strong-motion data from the seismic intensity observation network were released by the Japan Meteorological Agency and Kumamoto Prefectural Government. The strong-motion data at JR-Tateno were provided by the Railway Technical Research Institute. We use the hypocentral information catalog of the Japan Meteorological Agency in cooperation with the Ministry of Education, Culture, Sports, Science, and Technology (MEXT), and the source information from F-net provided by NIED. The authors would like to thank Dr. Kubo for provision of waveform inversion results. This study was supported in part by Grants-in-Aids for Scientific Research (B) (P.I.: Hidenori Kawabe, grant no. 16H03144) from the Ministry of Education, Culture, Sports, Science, and Technology of Japan and by Aichi Institute of Technology. This study was based on the 2017 research project “Knowledge acquisition for fault displacement evaluation” by the Secretariat of the Nuclear Regulation Authority (NRA), Japan. This work was supported in part by Aichi Institute of Technology, Japan.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Irikura, K., Kurahashi, S. & Matsumoto, Y. Extension of Characterized Source Model for Long-Period Ground Motions in Near-Fault Area. Pure Appl. Geophys. 177, 2021–2047 (2020). https://doi.org/10.1007/s00024-019-02283-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00024-019-02283-4