
Highlights
-
We further developed a method to investigate time-variability of vertical land motion (VLM) and regionally-correlated altimeter systematic errors around Australia.
-
Our approach confirms widespread subsidence of the Australian region, and this is not explained by glacial isostatic adjustment alone.
-
We identified noise driven by likely different oceanographic signals between tide gauge and offshore locations as a limit to resolving time-variable VLM signals.
-
The addition of non-reference missions improves spatial sampling and reduces the impact of differential oceanic signals.
-
The average rate of absolute sea-level rise is higher than previously published estimates, suggesting an acceleration in sea-level.
Abstract
We further developed a space–time Kalman approach to investigate time-fixed and time-variable signals in vertical land motion (VLM) and residual altimeter systematic errors around the Australian coast, through combining multi-mission absolute sea-level (ASL), relative sea-level from tide gauges (TGs) and Global Positioning System (GPS) height time series. Our results confirmed coastal subsidence in broad agreement with GPS velocities and unexplained by glacial isostatic adjustment alone. VLM determined at individual TGs differs from spatially interpolated GPS velocities by up to ~ 1.5 mm/year, yielding a ~ 40% reduction in RMSE of geographic ASL variability at TGs around Australia. Our mission-specific altimeter error estimates are small but significant (typically within ~ ± 0.5–1.0 mm/year), with negligible effect on the average ASL rate. Our circum-Australia ASL rate is higher than previous results, suggesting an acceleration in the ~ 27-year time series. Analysis of the time-variability of altimeter errors confirmed stability for most missions except for Jason-2 with an anomaly reaching ~ 2.8 mm/year in the first ~ 3.5 years of operation, supported by analysis from the Bass Strait altimeter validation facility. Data predominantly from the reference missions and located well off narrow shelf regions was shown to bias results by as much as ~ 0.5 mm/year and highlights that residual oceanographic signals remain a fundamental limitation. Incorporating non-reference-mission measurements well on the shelf helped to mitigate this effect. Comparing stacked nonlinear VLM estimates and altimeter systematic errors with the El Niño-Southern Oscillation shows weak correlation and suggests our approach improves the ability to explore nonlinear localized signals and is suitable for other regional- and global-scale studies.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Vertical land motion (VLM) of the Earth’s surface is a key link between changes in absolute sea-level (ASL) derived in a geocentric frame from satellite altimeters (ALTs) and relative sea-level (RSL) from tide gauges (TGs) attached to the crust in a local reference frame (e.g. White et al. 2014). VLM is often assumed to be dominated by glacial isostatic adjustment (GIA, e.g. Peltier et al. 2018), yet tectonics (e.g. Bevis and Brown 2014) and climate-induced mass redistribution of the atmosphere, ocean, and continental waters (e.g. Santamaría-Gómez and Mémin 2015) play a noticeable role over various timescales. Anthropogenic effects also contribute at local scales (e.g. Dangendorf et al. 2015; Raucoules et al. 2013). Quantifying VLM and its possible variability in time is required to improve our understanding of regional patterns of sea-level rise at the coast, and thus better planning of adaption strategies.
The Global Positioning System (GPS) has emerged as the main tool used to quantify VLM at TG locations (e.g. Hamlington et al. 2016; King et al. 2012; Santamaría-Gómez et al. 2012; Wӧppelmann et al. 2009). As most TGs are not yet equipped with co-located or nearby GPS sites, and GPS-derived ellipsoidal height series are often short in comparison with the altimeter records (Bouin & Wӧpplemann 2010), approaches seeking to estimate VLM from the combination of ALT and TG measurements have been explored (e.g. Wӧppelmann and Marcos 2016). These studies have provided new insight into VLM along the coasts yet have mostly neglected the systematic errors in altimeter datasets. These methods have also been affected by short-scale oceanic processes that act differently at coastal TG and offshore ALT measurement locations and thus potentially bias results.
Regionally-correlated systematic errors in altimetry may arise from accumulated errors in orbits, ranges, and other environmental and geophysical corrections that otherwise meet globally averaged mission specifications. These error contributions are considered as a major challenge to derive regional ASL with sub-mm/year accuracy (e.g. Fu and Haines 2013; Ablain et al. 2015; Couhert et al. 2015). Different ocean processes acting between the sample locations of TG and ALT records have been identified as another pronounced issue in the ALT minus TG approaches (e.g. Nerem and Mitchum 2002; Watson et al. 2015). The extent to which these residual oceanographic signals become a hard or fixed limit to the utility of the technique remains a vexing issue yet to be fully explored. The central proposition of studies using ALT-TG data to infer VLM, as well as the key prior assumptions and open questions surrounding the technique, are shown in Fig. 1.

Schematic overview of the altimeter minus tide gauge (ALT-TG) technique with the key prior assumptions and surrounding open questions. The ALTs observe absolute sea-level (ASL) at comparison points (CPs, blue and orange circles). TGs (red triangles) observe relative sea-level (RSL) at the coast. Also, Global Positioning System (GPS) stations (green squares) observe ellipsoidal heights to derive vertical land motion (VLM). We take the difference of sea-level observations between ALT CP (e.g. \({[\mathrm{ASL}]}_{{\mathrm{CP}}_{1}}^{{\mathrm{ALT}}_{1}}\)) and TG (e.g. \({[\mathrm{RSL}]}_{{\mathrm{TG}}_{1}}\)) to derive VLM at TG locations (e.g. \({[\mathrm{VLM}]}_{{\mathrm{TG}}_{1}}\)), mission-specific ALT systematic errors over a study region (e.g. \({[\mathrm{Bias}]}_{\mathrm{CP}}^{{\mathrm{ALT}}_{1}}\)), as well as the time-invariant and time-variant components of the residual (e.g. \({[\mathrm{Residual}]}_{{\mathrm{CP}}_{1},{\mathrm{TG}}_{1}}^{{\mathrm{ALT}}_{1}}\)), while subsets of tandem and dual crossovers are used. The covariances of ASL, RSL and GPS height series across time and space are included. Key assumptions to be tested are listed on the right-hand side. The potential nonlinearity in ALT systematic error and/or VLM parameters is also investigated. Figure adapted from Rezvani et al. (2021)
GPS observations of VLM across Australia suggest the continent is subsiding overall (e.g. Hammond et al. 2021; King et al. 2012; Riddell et al. 2020). Recent work by Riddell et al. (2020) using GPS time series showed the widespread pattern of subsidence cannot be fully explained by GIA. Earlier work also suggested subtle subsidence from spatially interpolating linear GPS rates to many Australian TGs (e.g. Burgette et al. 2013; White et al. 2014). This linear-only assumption was further challenged by Watson et al. (2010) who investigated anomalous subsidence on the Australian plate margin in response to the 2004 Mw 8.1 earthquake north of Macquarie Island. Riddell et al. (2021) and Hammond et al. (2021) also pointed out that some regions of continental Australia are subject to small post-seismic relaxation which may manifest in the vertical component. Other known drivers of nonlinearity include hydrological loads across the continent which are modulated strongly by the El Niño Southern Oscillation (ENSO, e.g. Han 2017), and more localized anthropogenic effects, such as across the Perth basin (e.g. Featherstone et al. 2015).
Estimation of VLM using ALT minus TG records around Australia has received some attention. Wöppelmann and Marcos (2016) pointed out that the ALT-TG combinations are likely to yield reliable VLM estimates in Western Australia. Pfeffer et al. (2017) derived VLMs by comparing the TG and ALT data and suggested a discrepancy with GIA predictions possibly due to continental tilt and changes in surface mass loading. More recently, Watson (2020) confirmed the general pattern of subtle subsidence, from differences taken between the altimeter and TG observations.
These studies adopted gridded rather than along-track products, made a linear VLM assumption, and did not consider the potential for residual mission-specific systematic errors around the region. Three key and interrelated questions emerge when seeking to improve our understanding of VLM around the Australian coast using the ALT-TG technique. First, could ALT-TG approaches be further developed to investigate potential time-variable signals in VLM and altimeter systematic errors? Second, to what extent is the approach limited by the unknown differential oceanographic signals between TG and ALT locations? Third, to what extent can the multi-mission along-track data improve spatial sampling and mitigate the latter ocean-induced limitations?
We address these questions by advancing the space–time Kalman filtering and smoothing method set out by Rezvani et al. (2021) who applied an early version of the framework to estimate linear-only signals of VLM and regional systematic error in the Baltic Sea region using the reference-mission altimetry records. Here, we consider multi-mission along-track datasets and simultaneously estimate the time-fixed and time-variable components of location-specific VLMs and residual altimeter-specific systematic errors around Australia since the early 1990s. We integrate measurements of ALT minus TG, ALT tandem/dual crossovers and GPS bedrock heights, accounting for correlated noise and observational covariances across time and space. To overcome the singularity of the underlying problem, we develop a refined multi-stage solution strategy to gradually estimate the highly correlated unknowns. Sensitivity tests are undertaken as well as comparing our multi-mission solution to the reference-mission-only implementation, to assess benefits and limitations of the approach (see Supplementary Sect. S2.4).
2 Datasets
Our altimeter datasets include 1-Hz along-track ASL from the reference missions (TOPEX, Jason-1, OSTM/Jason-2, and Jason-3 with temporal sampling every ~ 9.9 days) and to improve spatial sampling, the non-reference missions (ERS-2, Envisat, and SARAL/AltiKa with 35 day, and Sentinel-3A with 27 day, repeat sampling) with the ground tracks shown in Fig. 3. Altimeter datasets were retrieved from the Radar Altimeter Database System (RADS, Scharroo et al. 2013; data accessed March 31, 2020) and interpolated to offshore Comparison Points (CPs) spaced by 20 km, spanning from September 1992 to February 2020, relative to ITRF2008 (Altamimi et al. 2011). The so-called cal-1 mode correction was not applied to the TOPEX data (Beckley et al. 2017). Following Watson et al. (2015), TOPEX-side A and -side B were treated as two different missions. We applied the solid-Earth tides and then removed the ocean tides and loadings using the FES2014 model (Lyard et al. 2021). We used the AVISO dynamic atmosphere corrections (DACs, https://www.aviso.altimetry.fr/) for ALT-TG, substituted with the MOG2D model for ALT crossover series. We applied the pole tide model to the crossovers, but only the radial body pole tide component to the ALT-TG combinations (e.g. Desai et al. 2015). Table S1 lists other geophysical and environmental corrections applied.
We used hourly RSL series from a national network of 23 TGs accessible from the Australian Baseline Sea Level Monitoring Project (ABSLMP, and its Supplementary Stations) operated by the Australian Bureau of Meteorology (http://www.bom.gov.au/oceanography/projects/abslmp/abslmp.shtml), with the timespan between January 1990 and February 2020 (see Fig. 3 and Table S4). We limited the TG set to these gauges given they were sited in areas generally considered well connected to the open ocean to minimize the impacts of river/estuary outflow contributing to residual oceanography between the TG and ALT measurement locations. We similarly applied the AVISO DACs to the RSL records to account for the impact of atmospheric pressure changes on the sea-level variability (White et al. 2014). We then estimated and removed the ocean tides from the RSL records using the UTide software (Codiga 2011), considering nodal modulations and the same constituents as those used in the FES2014b model applied to the ASL time series.
Daily height series were used from 210 GPS sites provided by the Nevada Geodetic Laboratory (NGL, Blewitt et al. 2018; data accessed February 26, 2020). These data are relative to the ITRF2008 and have a maximum span of January 1994–September 2019 (noting that from 1994 to 2009 the site distribution is sparse given network densification occurred over ~ 2009 to ~ 2014, see Fig. 3 and Table S5).
For comparison purposes, we linearly interpolated GIA rates at the TG and GPS locations using an available 0.2° × 0.2° grid of ICE6G_D model (Peltier et al. 2018, http://www.atmosp.physics.utoronto.ca/%7Epeltier/data.php, last accessed November 18, 2018). Note the GIA predictions are referred to the centre of mass of the solid-Earth (CE) frame, but VLM trends derived from GPS and ALT-TG are with respect to the centre of mass of the entire Earth (CM) system (e.g. Blewitt 2003). Thus, the GIA discrepancy compared to our VLM estimates are partly associated with the drift of long-term average CM in the polar direction (Wu et al. 2012).
3 Methodology
3.1 Overview
The basic premise behind our approach is shown in Fig. 1. We further advanced the Kalman-based methodology developed by Rezvani et al. (2021) to simultaneously estimate the underlying parameters through recursive forward and backward solutions of the refined multi-stage approach as summarized in Fig. 2. Our observation vector is defined as:

A flow illustration of our multi-stage approach to estimate unknowns within subsequent solutions in a unified reference frame. The strategy commenced with estimating a priori estimates of linear altimeter systematic error or bias drift from a priori knowledge about linear VLMs at geodetic sites, followed by improving a priori estimates of linear VLM, and concluded with simultaneous estimation of nonlinear evolution in VLM and altimeter error parameters. Having derived the a posteriori average estimates of altimeter errors, linear VLMs were then subsequently optimized accordingly
that includes \({n}_{\mathrm{ATG}}\) ASL minus RSL (\({{\varvec{z}}}_{{\varvec{q}}}^{\mathbf{A}\mathbf{T}\mathbf{G}}\)) series, \({n}_{\mathrm{AXO}}\) ASL differences at tandem and dual crossovers (\({{\varvec{z}}}_{{\varvec{q}}}^{\mathbf{A}\mathbf{X}\mathbf{O}}\)), \({n}_{\mathrm{GPS}}\) GPS heights (\({{\varvec{z}}}_{{\varvec{q}}}^{\mathbf{G}\mathbf{P}\mathbf{S}}\)), and \({n}_{\mathrm{PSO}}\) pseudo-observation (PSO) constraints (\({{\varvec{z}}}_{{\varvec{q}}}^{\mathbf{P}\mathbf{S}\mathbf{O}}\)) over a study region. Note the subscript stands for the computational timestep \(q\) within the Kalman framework adopted from the Jason-series altimeter sampling repeat period (~ 9.9 days), while the superscripts indicate the observation types.
We first extracted 1-Hz along-track ASL data from \({n}_{\mathrm{ALT}}=(1, 2,\dots , l\)) missions at \({n}_{\mathrm{CP}}=(1, 2,\dots ,j\)) ALT CPs, that were then combined with hourly RSL records from \({n}_{\mathrm{TG}}=(1, 2,\dots ,i\)) TGs. We linearly interpolated the RSL in time to the nearest ASL within a distance threshold of 120 km off the coast, to construct ALT and TG differences (designated as ATG hereon). We removed residual annual and semi-annual terms using the harmonic analysis of all ATG observations relating to each CP, while the altimeter-specific intercepts were estimated simultaneously. For computational efficiency, we followed thresholds suggested by Rezvani et al. (2021) to limit our ATG combinations to a maximum of 8 mission-specific ATG series per TG. For later analysis, the candidate CPs were flagged as being ‘on’ or ‘off’ the continental shelf based on their relative location to the 200 m depth contour. Note the ATG series of the non-reference missions were incorporated at less frequent sampling periods, e.g. for Envisat, once in every 3rd computational epoch given different repeat orbit periods.
We then constructed measurements of tandem/dual ALT crossover (designated as AXO), through differencing the ASL data of the two overflying missions at the respective CPs that were located within 500 km of the coastal gauges. For computational efficiency, we reduced the numbers of tandem and dual AXO CPs using the same criteria proposed by Rezvani et al. (2021) as well as applying the additional root mean squared error (RMSE) and distance thresholds given in Table S2. We adopted the sampling times of AXO series as the average times of ASL measurements from each set of overflying missions. The dual crossover observations were less frequent than our computational timesteps, hence were ingested in a similar way as to the non-reference-mission ATG data.
We then linearly interpolated the daily height series from \({n}_{\mathrm{GPS}}=(1, 2,\dots ,k\)) GPS sites at the measurement times of the nearest ASL series to arrive at the third type of input observations. Note the GPS series were effectively down-sampled (from daily to ~ 9.9 day sampling) to conform with the computational intervals in our Kalman engine. We retained the daily sampling data to infer the comparative trends using the Hector analysis package (Bos et al. 2013).
We further introduced a suite of PSO constraints to take advantage of preliminary knowledge about the unknowns in the multi-stage solution strategy. We defined constraints on linear rates of VLM in the first solution to approximately estimate linear components of systematic errors in each altimeter mission that were later used in a subsequent solution to examine the a priori VLM rates. We constrained the final adjustment to the improved velocity field from the latter solution, to simultaneously resolve temporal evolution in the bias drift and VLM parameters. We derived the optimised VLM rates at TGs, once the former solution has been constrained to the resultant average estimates of altimeter systematic errors.
To allow the investigation of time-variable signals, in an extension of the method of Rezvani et al. (2021) we differentiated VLM into linear and nonlinear quantities, and further inspected the potential time-variability in altimeter systematic errors. We hence defined the state vector as:
comprised of (i) “time-fixed” unknowns that include \({{\varvec{v}}}_{{\varvec{q}}}\) for linear VLMs at TG and GPS sites, and \({{\varvec{s}}}_{{\varvec{q}}}\) for across-track ASL slopes; and (ii) “time-variable” unknowns that include \({{\varvec{\delta}}{\varvec{v}}}_{{\varvec{q}}}\) for nonlinear VLMs, and \({{\varvec{\xi}}}_{{\varvec{q}}}\) for time-dependent noise of observations. The intercepts \({{\varvec{a}}}_{{\varvec{q}}}\), defined at initial instants of the observational series, are dealt with as either “time-variable” or “time-fixed” parameters, depending on the steps of our multi-stage approach. The altimeter-specific residual systematic errors or bias drifts \({{\varvec{r}}}_{{\varvec{q}}}\) were primarily assumed to be “time-fixed”; however, these were treated as “time-variable” quantities in the final optimization of the multi-stage solution.
Our assumption is that TG and GPS data are free from common-mode systematic error that would otherwise significantly bias the average RSL at TGs or VLM at GPS sites. It is well known that individual TGs may be affected by unresolved datum jumps (e.g. Wöppelmann et al. 2008) and we assess this possibility later. It is also well known that GPS time series contain time-correlated noise (e.g. Williams et al. 2004) which we consider in the following section.
3.2 Kalman framework
We derived the filtered estimates of the state unknowns \({{\varvec{x}}}_{{\varvec{q}}}\) and covariances \({\sum }_{{\varvec{q}}}\) at all computational instants \({t}_{q}^{\mathrm{Kal}}\) in the forward solution, through the observations up to the computational instant and the predictions from a dynamic model linked to the previous a posteriori estimates. In the backward solution, we proceeded with the Rauch–Tung–Striebel smoothing to attain the a posteriori estimates at each instant using all observations available throughout the study span.
Following the underlying observational models described in Rezvani et al. (2021), we formulated the measurement equation at the timestep \(q\) as (e.g. Grewal and Andrews, 2008):
with the observational matrix \({{\varvec{H}}}_{{\varvec{q}}}\) constructed on an epoch-by-epoch basis and the Gaussian white noise \({{\varvec{e}}}_{{\varvec{q}}}{=[{{\varvec{e}}}_{{\varvec{q}}}^{\mathbf{A}\mathbf{T}\mathbf{G}} {{\varvec{e}}}_{{\varvec{q}}}^{\mathbf{A}\mathbf{X}\mathbf{O}} {{\varvec{e}}}_{{\varvec{q}}}^{\mathbf{G}\mathbf{P}\mathbf{S}} {{\varvec{e}}}_{{\varvec{q}}}^{\mathbf{P}\mathbf{S}\mathbf{O}}]}^{{\varvec{T}}}\) accounted for ATG combinations (\({{\varvec{e}}}_{{\varvec{q}}}^{\mathbf{A}\mathbf{T}\mathbf{G}}\)), AXO differences (\({{\varvec{e}}}_{{\varvec{q}}}^{\mathbf{A}\mathbf{X}\mathbf{O}}\)), GPS bedrock heights (\({{\varvec{e}}}_{{\varvec{q}}}^{\mathbf{G}\mathbf{P}\mathbf{S}}\)) and tight or loose constraints (\({{\varvec{e}}}_{{\varvec{q}}}^{\mathbf{P}\mathbf{S}\mathbf{O}}\)), that are each zero-mean and have the variance–covariance (VCV) matrices \({{\varvec{R}}({\varvec{e}}}_{{\varvec{q}}}^{\mathbf{A}\mathbf{T}\mathbf{G}})\), \({{\varvec{R}}({\varvec{e}}}_{{\varvec{q}}}^{\mathbf{A}\mathbf{X}\mathbf{O}})\), \({{\varvec{R}}({\varvec{e}}}_{{\varvec{q}}}^{\mathbf{G}\mathbf{P}\mathbf{S}})\) and \({{\varvec{R}}({\varvec{e}}}_{{\varvec{q}}}^{\mathbf{P}\mathbf{S}\mathbf{O}})\), respectively.
We undertook spectral analysis of residuals (following removal of a linear fit) to fill the diagonal elements of the VCV matrices of the ATG, AXO and GPS observations (Supplementary Sect. S1.3.2 and Fig. S2). The off-diagonal elements of these matrices were derived from empirical semi-variograms of the respective residuals (see Supplementary Sect. S1.3.3 and Fig. S3). The elements of diagonal \({{\varvec{R}}({\varvec{e}}}_{{\varvec{q}}}^{\mathbf{P}\mathbf{S}\mathbf{O}})\) were filled with the constraint variances. We considered \({\varvec{R}}\equiv {{\varvec{R}}}_{{\varvec{q}}}\) as the VCV matrix of the measurement noise \({{\varvec{e}}}_{{\varvec{q}}}\), that is notated as:
To form the dynamic model, we linearly linked the state vectors \({{\varvec{x}}}_{{\varvec{q}}}\) and \({{\varvec{x}}}_{{\varvec{q}}-1}\) at the consecutive instants \({t}_{q}^{\mathrm{Kal}}\) and \({t}_{q-1}^{\mathrm{Kal}}\) through (e.g. Grewal & Andrews 2008):
characterized by the diagonal transition matrix \({\varvec{F}}\), and the Gaussian state process noise \({{\varvec{\varepsilon}}}_{{\varvec{q}}}={[{{\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{r}}} {{\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{v}}} {{\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{\delta}}{\varvec{v}}} {{\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{s}}} {{\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{a}}} {{\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{\xi}}}]}^{{\varvec{T}}}\) following the VCV matrix \({\varvec{Q}}\equiv {{\varvec{Q}}}_{{\varvec{q}}}\), such that:
in which the superscripts refer to parameter types for mission-specific bias drifts \({{\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{r}}}\sim {{\varvec{Q}}({\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{r}}})\), linear VLMs \({{\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{v}}}\sim {{\varvec{Q}}({\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{v}}})\), nonlinear VLMs \({{\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{\delta}}{\varvec{v}}}\sim {{\varvec{Q}}({\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{\delta}}{\varvec{v}}})\), across-track slopes \({{\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{s}}}{\sim {\varvec{Q}}({\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{s}}})\), observational intercepts \({{\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{a}}}{\sim {\varvec{Q}}({\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{a}}})\) and time-correlated noise \({{\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{\xi}}}\sim {{\varvec{Q}}({\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{\xi}}})\). Note the elements corresponding to the time-correlated noise in the matrices \({\varvec{F}}\) and \({{\varvec{Q}}({\varvec{\varepsilon}}}_{{\varvec{q}}}^{{\varvec{\xi}}})\) were filled with the first-order autoregressive (AR1) coefficients and magnitudes, inferred from the spectral analysis of the observational residuals (see Supplementary Sect. S1.3.2).
In practice, we updated the predicted and filtered estimates of the state unknowns and covariances if the associated observations were recorded in the individual timesteps, otherwise the former estimates of the unknowns and uncertainties were carried forward. We used singular value decomposition to invert the underlying large-dimension covariance matrices across the Australian region, with the matrix sizes of ~ 4000 × 4000 and ~ 7000 × 7000 for the filtering and smoothing gains, respectively. We undertook preliminary analyses to derive a priori estimates of unknowns and to configure the noise content and spatiotemporal covariances within our framework (see Supplementary Sect. S1.3). Note that we considered the correlations between each set of observational series but did not assume any spatial correlations between the unknowns.
3.3 Multi-stage solution approach
In any ALT-TG approach used to infer VLM, the average VLM estimated across the study region is inherently correlated to any regional systematic bias that may be present in ALT records. To differentiate between the weighted average of the VLM across the network and the average systematic error (bias drift) across the altimeter constellation, we implemented the refined multi-stage solution shown in Fig. 2 (see Fig. S1 for the detailed flow). We first approximated estimates of time-fixed bias drift per mission in Solution 1 using tight constraints on our linear VLM datum at TG locations inferred from GPS-Krig interpolation analysis (Supplementary Sect. S1.3.1). In Solution 2, we improved a priori estimates of VLM rates at TGs, by placing tight constrains on the median estimates of linear bias drifts from Solution 1. We detected and excluded outlying ATG records contaminated with potential RSL datum issues, by visually checking cycle-by-cycle weighted averages of “white plus AR1” residuals of ATG observations formed at all CPs relevant to any given TG (see Supplementary Sect. S1.3.4 and Fig. S4).
We successively sought to resolve nonlinear evolution in both VLM and bias drift unknowns, with tight constraints on the median estimates of VLM trends generated from Solution 2. Within a simultaneous adjustment of Solution 3, the time-variable bias drifts were derived with respect to the weighted average datums of linear and nonlinear VLMs throughout the network of TGs. Finally, we repeated Solution 2 to update the linear VLM estimates at TGs, relative to the weighted averages of the time-variable bias drift (as the most probable values) derived from Solution 3. More details and the process noise used in our Kalman configuration across the Australian region are provided in Supplementary Sect. S1.2 and Table S3.
4 Results
4.1 VLM estimates
4.1.1 Linear VLM
We first applied our methodology to infer time-fixed VLMs at TGs and nearby GPS sites around the Australian region. Figure 3a shows the magnitudes and spatial distribution of our estimates of VLM trend. The GPS-inferred VLM field reveals that the Australian plate is largely subsiding with weighted mean rates of –0.10, –0.38, –0.95 and – 0.62 mm/year in the NW, NE, SW, and SE regions, respectively, in general agreement with previous GPS estimates of subsidence (Hammond et al. 2021; Riddell et al. 2020). Figure 3b maps the differences between our VLM trends and the benchmark estimates (i.e. GPS-Krig at TG, and Hector at GPS locations), and in Fig. 4 as a function of latitude. We found a good agreement between our linear VLM estimates and Hector-derived trends at GPS sites, with a weighted mean difference of + 0.03 mm/year and WRMSE of 0.12 mm/year (Fig. 4). This comparison identified no statistically significant difference, confirming the basic operation of the filter using the down-sampled GPS series at the ~ 9.9 day intervals.

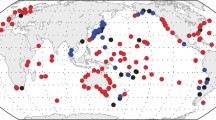
Map of (a) our estimates of time-fixed vertical land motion (VLM), and (b) differences of our approach minus Global Positioning System (GPS)-Krig and Hector alternatives at tide gauges (TGs, squares) and GPS sites (circles), respectively. TGs with significant differences at 1-sigma are annotated in green. For clarity, TG latitudes at the TOWN and FREM locations are shifted by + 0.75 and –0.45 degrees, respectively. The ground tracks of Jason-series and Envisat-series altimeters are shown in orange and grey, respectively. Note the different colour scales in (a) and (b)

Profile of differences in time-fixed vertical land motion (VLM) plotted against latitude, our estimates minus Global Positioning System (GPS)-Krig at tide gauges (TGs, blue squares) and our estimates minus Hector at GPS sites (orange circles). The weighted average and standard deviation (STD) of the differences are annotated. Sites with significant differences at 1-sigma are labelled in green. Error bars are ± 1-sigma and scaled by the a posteriori variance factor. For clarity, TG latitudes at the CAPE, CARN and FREM locations are shifted by – 0.45 degrees
Conversely, we noticed five TGs (flagged by green labels in Figs. 3 and 4) with significant differences (1-sigma) between our VLM trends and spatially interpolated GPS-Krig velocities (with a weighted mean difference of + 0.06 mm/year and WRMSE of 0.73 mm/year). We repeated the same comparison between our VLM and ICE6G_D trends (see Figs. S5 and S6). The weighted mean differences of our estimates minus the GIA predictions were – 0.42 and – 0.40 mm/year at TG and GPS sites, with the respective WRMSE of 0.93 and 1.04 mm/year. Tables S4 and S5 list a priori and posteriori estimates of VLM at the TG and GPS locations, respectively.
We compared the estimates of VLM uncertainty from our solution, scaled by the a posteriori variance factor, with those from GPS-Krig and Hector approaches (Fig. S7). The average uncertainties from our approach at the GPS and TG sites were 0.65 and 0.71 mm/year, respectively, comparable but marginally lower than 0.83 and 0.87 mm/year inferred from the Hector-derived (at GPS) and GPS-Krig (at TG) uncertainties, respectively.
Our approach suggests localized VLM trends at some TGs around the continent. In particular, the current subsidence at the FREM TG (VLM rate of – 0.96 ± 0.53 mm/year) is noticeably closer to zero than the PERT GPS (– 3.02 ± 0.48 mm/year, with a record span of 25 years, and ~ 31 km away), the HIL1 GPS (– 2.17 ± 0.55 mm/year, with a record span of 22 years, and ~ 25 km away), and the HILL TG (– 2.38 ± 0.52 mm/year, ~ 25 km away). This is broadly consistent with the findings of Featherstone et al. (2015). We found that VLM at the FORT TG (+ 0.04 ± 0.77 mm/year) in Sydney Harbour is marginally, yet insignificantly, different from that at the KEMB TG (– 0.64 ± 0.67 mm/year with a ~ 75 km separation), and the FTDN GPS (– 0.61 ± 0.59 mm/year, with shorter timespan of ~ 7 years, ~ 1 km away).
Our estimates suggest that both the TOWN and CAPE TGs are subsiding at a comparable rate considering the uncertainty (– 1.75 ± 0.88 mm/year and –1.54 ± 0.73 mm/year, respectively, separated by ~ 24 km). These rates of subsidence are marginally faster (although insignificant) than the TOW2 GPS (– 0.85 ± 0.50 mm/year, spanning ~ 25 years, given ~ 23 km and ~ 1 km away from TOWN and CAPE gauges). An anomalous uplift of + 0.95 ± 0.71 mm/year was found at the LORN TG, compared with subsidence of – 0.15 ± 0.70 mm/year from the nearest TG (STON, ~ 110 km away), and – 0.67 ± 0.59 mm/year at the nearest GPS (MNGO, ~ 39 km away, and spanning ~ 8 years). Noteworthy, the LORN gauge (one of the ABSLMP supplementary stations) shows the lowest rate of RSL rise (BOM monthly report, http://www.bom.gov.au/ntc/IDO60201/IDO60201.202108.pdf), hinting at localized uplift or an atypical localized oceanographic setting.
4.1.2 Nonlinear VLM
We next sought to examine the ability of our approach to resolve potential time-variability in site-specific VLMs. To tune our filter and appropriately distinguish between signal and noise, we assumed the magnitude of low-frequency variability present in GPS records located near to the coast (defined as < 100 km) should be the same as those observed at TGs, noting ~ 75% of the GPS sites are located within 60 km off the coast. Given site-to-site variability, we assessed this by stacking across all relevant sites and computing the weighted mean per unit time. Our assumption was that the STD of variability in the coastal GPS stack should be approximately the same as the TG stack. As an external control, we checked our stacked time series at the TG and GPS sites with the stack from the original raw GPS height series, that was detrended outside of our engine. We obtained all stacked series from Huber Robust estimation using iteratively reweighted least squares (IRWLS, e.g. Maronna et al. 2006; Rezvani et al. 2015), initially weighted by the inverse of the respective squared uncertainties.
As shown in Fig. 5, as expected, our GPS-stacked time series (of “coastal” GPS sites sampled at the Kalman time step of ~ 9.9 days; red line) corresponded closely to the external raw stack (black line). The temporal variability in the stacked GPS series at the few-mm level is likely to be mainly driven by changes in Terrestrial Water Storage (TWS) around the continent, which is in turn modulated by the major climate modes of the El Niño-Southern Oscillation (ENSO) and the Indian Ocean Dipole (IOD) anomaly (e.g. Fasullo et al. 2013). We observed some correlation between the GPS-stacked series and the Southern Oscillation Index (SOI) used as a proxy for ENSO (Fig. 5 lower panel). We note this correlation (– 0.22) is weak, yet it is broadly consistent with our expectation that the hydrological loadings are the dominant driver of time-variable VLM (e.g. Han 2017; McGrath et al. 2012; Tregoning et al. 2009).

Weighted average stack of our estimates of time-variable vertical land motion (δVLM) at tide gauges (TGs, blue line) and coastal Global Positioning System (GPS) sites (red line) from Solution 3, against the control stack derived from detrended raw height series (black line). The smoothed lines show the low-passed results after applying a Butterworth filter to the stacked series. For comparison, the Southern Oscillation Index (SOI), with the sign reversed, is shown in the lower panel as the climatic descriptor in the region. The standard deviations (STDs) of the stacked series are annotated
The TG-stacked VLM series (blue line, Fig. 5) showed some correlation (+ 0.34) with our independent GPS stack (red line, Fig. 5), yet this is again quite weak, providing limited evidence supporting our ability to resolve time-variable VLM. We drew the same conclusion from comparing the TG- and GPS-stacked series over each of the NW, SW, NE, and NW sub-regions (Figs. S8–S11). Site-by-site comparisons of nonlinear VLMs show some interesting correlations (e.g. HEDL, HILL, BROO, ESPE and CAPE TGs with KARR, HIL1, BRO1, ESPA and TOW2 GPS sites, respectively) yet significant variability between some TGs and the nearby GPS sites is evident (see Figs. S12–S16). We also note that GPS series will be affected by some common-mode error that will affect the stacked series (e.g. Tian & Shen 2016).
This inspection is perhaps a key to understanding where the technique works well or is inherently limited. This also highlights an inevitable limitation of our approach in fully resolving subtle nonlinearity at any individual TG location. We further return to this point in Sect. 4.4 to examine the potential relationship of the issue with the differential oceanographic signals as a function of distances between CP and TG sample locations, as well as proximity/geometry to the coast and the level to which CPs are located on the continental shelves. We note that capturing the time-variable VLM (specific to each TG) is important to resolving regionally-coherent ALT systematic error (i.e. mission-specific, common to all gauges), and we investigate this in the next section.
4.2 Altimeter systematic errors
We investigated potential linear and nonlinear components of altimeter systematic errors in a simultaneous adjustment where the nonlinear VLMs at TG locations were also estimated. Figure 6 shows the filtered and smoothed estimates of the multi-mission systematic errors around the Australian coast. The average values of the smoothed estimates, ranging from – 1.09 ± 0.14 mm/year for Jason-1 to + 4.80 ± 0.26 mm/year for TOPEX-side B, suggest that altimeter bias drifts are significant in a regional context yet remain within mission specifications and consistent with the regional error budget assessments (Ablain et al. 2015). These estimates are also consistent with regional differences in the leading orbit products alone (e.g. Belli et al. 2021; Couhert et al. 2015, 2020). We note that the reliability of these time-fixed estimates is dependent upon the accuracy of the linear VLM datum which was stabilized from the weighted average of the GPS-Krig interpolations, i.e. we note a systematic bias in the GPS velocity field would map directly into the altimeter systematic errors.

Time-variable systematic errors of (top) non-reference and (middle) reference altimeters, simultaneously estimated with the time-variable vertical land motions (δVLMs) in Solution 3. Note the convergence between the estimates from filtered (black lines) and smoothed (coloured lines) solutions. The mission-specific averages of smoothed bias drifts are annotated with the 1-sigma uncertainties that have been scaled by the a posteriori variance factor. The filter-based uncertainties are also given in brackets. The sign-inversed Southern Oscillation Index (SOI) is shown in the lower panel. The non-reference and reference cycles are annotated on the top axes with the same colours
The investigation into whether time-variable regionally-coherent systematic errors were plausible offered an interesting insight, particularly for the Jason-2 mission (Fig. 6). On first inspection, a significant change in behaviour in the first ~ 3.5 years of the Jason-2 performance was suspected to have erroneously arisen in our engine due partly to imperfect cross-calibration of Envisat and Jason-2 up until 2010.8 when Envisat ceased. However, similar patterns were derived in a solution when the non-reference datasets were excluded (Fig. S23). This anomaly for Jason-2 coincides with the remarkable 2010–12 La Niña period, with a large amount of water mass on the Australian continent clearly affecting global mean sea-level (e.g. Boening et al. 2012). We return to this point in the discussion.
Other mission-specific systematic error time series show notably less variability than for Jason-2 (see coloured lines, Fig. 6). Noting the small magnitude of the time-variability, each series shows some correlation with the low-frequency variability observed in the SOI series. We note the correlation coefficients of approximately – 0.5 to – 0.6 for the reference-mission series, and approximately – 0.4 to – 0.6 for ERS-2, Envisat and Sentinel-3A series, except for negligible correlation for the short SARAL series. This reveals that appropriately capturing any ENSO-related signal in the nonlinear VLM datum (which is expected considering results in Han et al. 2017) is critical to our ability to appropriately estimate the time-variable systematic errors of any given mission (Supplementary Sects. S2.4.3 and S2.4.4).
4.3 Implications for coastal and offshore ASL
We derived ASL trends by applying our estimates of linear VLM to RSL rates, determined from the TG data resampled from the non-tidal residuals every ~ 9.9 days. We ran a Kalman framework with a “white plus AR1” stochastic model to estimate the RSL trends over the same timeframe of the altimetry records. We used spectral analysis to derive tuning parameters including the measurement noise, as well as the process noise and transition coefficients of the time-correlated errors. We selected tight process noise of 10−3 \(/\sqrt{9.9}\,\mathrm{mm}\)/\(\mathrm{year}\sqrt{\mathrm{s}}\) and 10−6 \(/\sqrt{9.9}\,\mathrm{mm}\)/\(\sqrt{\mathrm{s}}\) (where \(\mathrm{s}\) is the ~ 9.9 day Kalman timestep) to tune the estimates of linear trends and intercepts, respectively. We considered spatiotemporal covariances within the RSL noise, from semi-variogram analysis, up to a length-scale of 750 km (Fig. S3).
We observed spatial inconsistency in the RSL trends at adjacent TGs around the coast (Fig. 7a). We speculate that this high spatial variability has a dominant contribution from localized VLM processes and not highly-localized ocean processes given the spatial scale involved and general connectivity of most of the gauge locations to the open ocean. Inspection of the computed ASL trends conversely shows improved coherence at the adjacent TGs (Fig. 7b).

Map of (a) relative sea-level (RSL) trends, and (b) resultant absolute sea-level (ASL) rates at tide gauge (TG) locations after applying our estimates of linear vertical land motion (VLM), derived from the multi-mission solution, over the same timeframe (1992.7–2020.1). TGs with 1-sigma significant VLM differences from Global Positioning System (GPS)-Krig interpolations are highlighted with green annotations. For clarity, TG latitudes at the TOWN and FREM locations are shifted by small amounts. The ground tracks of Jason-series and Envisat-series altimeters are shown in orange and grey, respectively
Using ~ 17 years of data, White et al. (2014) showed that ENSO effects were largely responsible for a large south-to-north gradient in ASL trends in the Australian region. Using a data duration of ~ 27 years, we expected less influence of ENSO on the ASL trend estimates around Australia. We also expected very similar spatial variability to the altimeter-derived ASL maps produced by other groups (e.g. https://sealevel.colorado.edu/trend-map; https://doi.org/10.5067/SLREF-CDRV3). The open question is whether residual oceanographic signals (specific to a TG and CP pair) bias our estimates of VLM and generate a spatially-coherent ASL field at the TGs which may inappropriately be comparable to the offshore altimetry.
Our approach did yield a more spatially-coherent set of ASL estimates at TGs compared to those computed using GPS-Krig and GIA VLM rates (compare Figs. 7b and S19). Based on our assumption of negligible contribution to the trend from residual ocean signals, this suggests that localized VLM trends at the TGs cannot be reliably inferred from either spatially interpolated GPS or GIA outputs–each of which would result in an inadequate representation of likely ASL variability in the region. Table S4 lists the RSL and ASL estimates at the TG locations.
To further examine the spatial variability in ASL rise, we fitted a quadratic polynomial to the underlying sets of ASL estimates as a function of latitudes in the SE-NW direction (hereon referred to as the reduced latitudes, Fig. S20). As expected, these show a reduced south-to-north gradient in ASL trends compared to White et al. (2014). The RMSE of our ASL trends about the fitted model is 0.39 mm/year, compared with 0.67 and 0.75 mm/year from GPS-Krig and GIA estimates. This implies a ~ 42 and ~ 48% reduction in variability of the geographical ASL trends at TGs (in the SE-NW direction), when using our VLM estimates compared to GPS-Krig and GIA, respectively. Our estimates suggest a weighted average ASL rate of + 3.40 ± 0.34 mm/year around the Australian coast with the highest values at individual TGs in the NW (around ~ 5.0 mm/year) and the lowest in the SE (around ~ 2.5 mm/year).
We evaluated the consistency of our TG ASLs with ASLs computed from the Jason- and Envisat-series altimetry dataset alone—again, assuming negligible contribution from residual ocean signals between the TG and altimeter CP locations. To do this, we computed the altimetry ASL trends outside of our engine yet applied our corrections for time-varying mission-specific bias drifts (Fig. 6) and relative intra- and inter-mission biases (Figs. S17 and S18). We computed a Kalman filter and smoother solution with a “white plus AR1” stochastic model to derive the ASL estimates at the already used CPs over the satellite era. We undertook spectral analysis to derive the measurement noise, the process noise of time-correlated errors, and the AR1 transition coefficients. We assumed the same process noise used from RSL trend analysis to estimate the linear trends and CP-specific intercepts. Spatiotemporal covariances within the ASL noise were also applied up to a length-scale of 750 km, from the relevant semi-variogram analysis (Fig. S3).
As expected, we found a good agreement between our ASL estimates at TG and CP locations, confirming the geographical dependence in ASL rise, relative to the SE-NW direction in the region (Fig. 8). The inferred ASL estimates at altimetry CPs show RMSE of 0.46 mm/year once fitted with a polynomial reduced to the SE-NW direction, and yield a weighted average ASL rate of + 3.51 ± 0.26 mm/year. Comparing our estimates of coastal ASL at TGs to offshore ASL at the nearest CPs shows the differences do not exceed ~ ± 1.1 mm/year, on a per TG basis. This range reaches ~ ± 1.8 and ~ ± 2.3 mm/year, once GPS-Krig and GIA interpolations were substituted in place of our VLMs, respectively.

Profile of absolute sea-level (ASL) trends at tide gauges (TGs) using relative sea-level (RSL) plus our linear vertical land motion (VLM) from the multi-mission solution, Global Positioning System (GPS)-Krig, and ICE6G_D glacial isostatic adjustment (GIA) predictions, compared with those derived at comparison points (CPs) using altimetry alone after applying estimated bias drifts and relative biases. Solid and dashed lines show a quadratic polynomial fitted to each set of ASL estimates per latitude reduced to the SE-NW direction with root mean squared error (RMSE) annotated in the legend. Error bars are ± 1-sigma scaled by the a posteriori variance factor
4.4 Implications for the approach: differential oceanography
To probe the presence and potential impact of residual oceanographic signals, from Solution 3, we computed the “white plus AR1” noise magnitudes of ATG combinations between each pair of TG and CP pertaining to each mission series. Figure 9 shows the results versus the distances of CPs from respective TGs and the coast around the region, while distinguishing whether the CPs were ‘on’ or ‘off’ the continental shelf (defined as the 200 m depth contour).

The “white plus AR1” noise magnitudes of altimeter minus tide gauge (ATG) series from Solution 3 as a function of distances of comparison points (CPs) from (a) TGs and (b) coast, for the Jason-series, Envisat-series, and Sentinel-3A constellations (colours). Note an intrinsic increase in the noise level as a function of the distances, though this pattern is more evident in the distances to the coast compared to the distances to TGs. CPs located “on” and “off” the continental shelf are differentiated with grey and bolder black dots (defined as the 200 m depth contour)
The ATG noise magnitudes generally increased as a function of CP distances from either TGs or the coast, though this dependence becomes more pronounced as a function of the CP separation off the coast (Fig. 9). Both distance metrics are influenced by relative geometry of the coast and satellite ground tracks. Further, the highest magnitudes of ATG noise were often associated with CPs located off the continental shelf (bold black dots, Fig. 9), where the offshore ocean dynamics are likely to be substantially different in comparison with the coastal on-shelf conditions.
We then investigated the regional pattern of the magnitudes of time-variable VLM against the magnitudes of “white plus AR1” ATG noise (for each mission series) on a per TG basis (Fig. 10). Sites adjacent to the narrow continental shelf such as FORT are interesting—the ATG noise scatter is high, consistent with the differential oceanographic signals, and manifested by large numbers of CPs located off the narrow shelf. However, the nonlinear VLM variability at this site is moderate, which likely highlights the beneficial effect of Sentinel-3A data (with low-magnitude ATG noise) in the integrated adjustment. This is further confirmed by comparing the RMSE of nonlinear VLM variability of this gauge, derived from the multi-mission and reference-mission-only solutions, of 2.37 mm versus 2.86 mm, respectively.

Spatial variability in the root mean squared error (RMSE) of nonlinear vertical land motion (green bars, \({\updelta} \text{VLM}\), right-hand axis) and “white plus AR1” noise magnitudes of altimeter minus tide gauge (ATG, left-hand axis) observations, pertaining to the Jason-series (blue), Envisat-series (orange) and Sentinel-3A (purple) constellations on a per TG basis. Note the different y-axis scales. Comparison points (CPs) located “on” and “off” the continental shelf are differentiated with grey and bolder black dots (defined as the 200 m depth contour). TGs are ordered anti-clockwise, commencing with TOWN located on the North-East coast of Australia
Given the magnitude of changes in TWS, we expected the TGs in the North and North-West regions (i.e. DARW, BROO, HEDL, and to a lesser extent given far-field effects, BOOB) to be associated with significant nonlinear VLM. This was the case, however, these sites were also associated with large ATG noise which is likely driven by the unique coastal geometry of these shallow-shelf areas, and the possible impact of various shelf-based resonances in the region. This hints that the engine was not appropriately separating these two components of nonlinear VLM and ATG noise, which reveals the limitation of the approach in these complex regions. Conversely, the filter was working well in some cases such as ESPE and HILL gauges as evidenced by comparable localized variability to the nearby GPS sites (Fig. S13).
Investigation into the regional pattern of variability on a per TG basis further supports a relationship between the ATG noise magnitudes and distances between CPs and the coast (rather than the distances to TGs). Sites with high-magnitude ATG noise typically had higher distances between the CP and the coast, with less discernible correlation with the CP and TG separations (compare Fig. 10 with Fig. S39). Also, the CPs located ‘off’ the shelf had significantly greater noise in most cases. Given the ground-track geometry, the median distances of the non-reference CPs to the coast were slightly less than those pertaining to the Jason-series missions. A lower median ATG noise was thus observed for the non-reference-mission CPs, compared to those of the reference missions. This suggests the effects of different oceanographic regimes at the CP and TG locations, specifically in the cases where the CPs were located off the narrow continental shelf.
Differentiating CPs based on their location with respect to the continental shelf provides further insight into the technique. We found that ~ 15, ~ 7 and 6% of our ATG observations were formed using off-shelf CPs pertaining to the Jason-series, Envisat-series and Sentinel-3A constellations, respectively. TGs adjacent to narrow stretches of continental shelf (i.e. HILL, FREM, PORT, SPRI, KEMB, FORT and BRIS) had the highest number of the off-shelf CPs. For these gauges, we separately computed ATG noise magnitudes using CPs that were either ‘on’ or ‘off’ the shelf (Fig. 11). The ATG noise at these gauges are noticeably increased for off-shelf CPs, especially in the case of Jason-series combinations, and particularly for gauges located adjacent to the highly dynamic East Australian Current (i.e. KEMB, FORT and BRIS) (see Figs. 10 and 11).

The “white plus AR1” noise magnitudes of altimeter minus tide gauge (ATG) series, pertaining to the Jason-series, Envisat-series and Sentinel-3A constellations associated with the TGs adjacent to narrow stretches of continental shelf. For each gauge (identified in each column), for each constellation (identified by colour), ‘on-shelf’ comparison points (CPs) are shown on the left (darker colour shade) and ‘off-shelf’ CPs on the right (light colour shade). Note, for each constellation, the percentage of the ATG observations associated with CPs that are located on the shelf is annotated. The linear vertical land motions (VLMs) at TGs computed using only on- or off-shelf CPs are annotated
We lastly computed the VLM rates of these adjacent TGs separately using only the ‘on-shelf’ versus ‘off-shelf’ ATG combinations, respectively (Fig. 11). The comparison of these VLM estimates suggests the presence of insignificant residual trends up to approximately ± 0.5 mm/year in the ATG differences on a per TG basis, likely due to different sampling the oceanographic signals at these gauges and the off-shelf CPs. This provides a highly useful insight into the ALT-TG technique, motivating future investigations.
4.5 Residuals and a posteriori analysis
We undertook a suite of quality control tests to understand the efficiency of our Kalman performance in capturing the unknown parameters that evolve across time and space (see Supplementary Sect. S2.6). We first monitored the temporal convergence between the forward filtered estimates and the smoothed estimates for each set of site-specific parameters in the state vector: intercept, across-track ASL slope, linear VLM, and nonlinear VLM, at each different stage of the multi-stage approach (see Figs. S40–S43 as an example of each parameter for a representative CP and TG pair). Second, we evaluated estimates of averaged “white plus AR1” ATG noise (on a per TG basis) across all missions in the subsequent solutions (see Figs. S44 and S45 for an illustrative example). Third, we investigated the spatial variability in the derived ASL slopes, with respect to the a priori values from the DTU15 mean sea surface (Fig. S47). Failure of these tests warn of anomalous cases that likely have inappropriate settings for the state process noise, which are unable to decorrelate the signals and noise in the solutions.
To monitor the stability of the time-fixed VLM “datum” in our solutions, we compared our multi-mission VLM trends against the GPS-Krig interpolations at TGs (Fig. 4). This reveals that the weighted average of discrepancy in the GPS-Krig and our estimates of VLM “datum” does not exceed the average uncertainty (i.e. ± 0.69 mm/year derived nominally as the standard error from GPS-Krig uncertainties). We further computed the weighted average of our estimates of linear TG VLMs per cycle and monitored the stability over time to ensure there was no spatially-correlated common-mode variability reflected in the resultant VLM datum (see Fig. S46); this otherwise would lead to significant step-change in the estimates of mission-specific systematic error. This analysis further supports the reliability of the significant bias drift estimated for the TOPEX-side B mission over the study region.
Finally, we checked the weighted average stack of the “white plus AR1” noise estimates of the ATG combinations to assess the presence of any uncaptured trends or time-varying signals over the region (Fig. 12). As expected, the RMSE values over our domain were marginally higher than those from global studies (e.g. Beckley et al. 2017; Nerem et al. 2018), yet comparable with our previous work over the Baltic Sea region (Rezvani et al. 2021). This investigation reveals that negligible signal remains unmodelled in the ATG residuals, which supports the validity of our a priori assumptions and that our filter was tuned appropriately. We refer the readers to Rezvani et al. (2021) for further information about the tuning process and performance evaluations.

Cycle-by-cycle weighted average stack of “white plus AR1” residuals of altimeter minus tide gauge (ATG) formations in the region, inferred from the last solution of our multi-stage approach, with root mean squared error (RMSE) of mission-specific noise annotated. The observational cycles of non-reference and reference satellites are shown on the top axes with the same colours
5 Discussion
We have investigated time-fixed and time-variable components of site-specific VLMs and mission-specific systematic errors around the Australian continent using a novel analysis of altimetry, GPS, and TG records. A key assumption of our approach is that GPS-Krig interpolations at TG locations were sufficiently accurate to stabilize an a priori VLM “datum” for the initial determination of time-averaged bias drifts. As noted by Rezvani et al. (2021), a network-wide mean error in the a priori VLM “datum” has the potential to map into the average mission-specific altimeter systematic error. The inclusion of localized nonlinear VLM at TGs into the measurement model established an a posteriori VLM “datum” to subsequently distinguish the potential time-variability in the altimeter systematic errors. A key assumption used to tune our filter is that the magnitude of time-variability is expected to be comparable between TGs and GPS (in the coastal zone), given the likely common-mode influence of deformation caused by hydrological loading. This assumption is made despite the difference in spatial sampling of the associated networks in the coastal zone and the presence of technique-specific errors in GPS solutions (e.g. Tregoning and Watson 2009).
Our estimates of linear VLM showed a widespread pattern of subsidence of the Australian coastline, with the median trends of – 0.55 and – 0.66 mm/year at the GPS and TG sites, respectively. Comparing these with the median of ICE6G_D GIA predictions highlights a discrepancy of ~ 0.45 mm/year, which is broadly consistent with Riddell et al. (2020) and partly explained by our lack of treatment of frame differences between the GIA model and ITRF (e.g. Sun and Riva 2020). This discrepancy reduced to ~ 0.39 mm/year after applying these corrections, which was further supported by the median difference of ~ 0.38 mm/year in comparison with the a priori GPS-Krig VLM rates. We note that Riddell et al. (2020) was unable to attribute the observed subsidence to a known geophysical source, but Riddell et al. (2021) and Hammond et al. (2021) suggested there may be additional contribution from post-seismic signals since 2004.
Comparing the time-fixed VLMs at TGs with the nearby GPS stations reveals very local-scale differences within 15 km, yet a negligible weighted average difference across all sites of – 0.12 mm/year. The variability in these differences was quite high, with the STD of 0.81 mm/year and WRMSE of 0.73 mm/year. Note that differences in timespans of the TG and GPS records will contribute to this variability (compare Tables S4 and S5). Our VLM trends, applied to the RSL records, generally improved the spatial coherence in ASL rates at TGs around the region. The scatter of our TG ASLs was 0.56 mm/year, significantly smaller than when GPS-Krig (0.94 mm/year) or GIA (0.97 mm/year) were used. Also, our scatter of ASL estimates was slightly better than the solution when altimeter systematic errors were constrained to be zero across the satellite era (0.56 vs. 0.64 mm/year, Fig. S38). In a regional context, the scatter of our ASL estimates was 0.52, 0.43, 0.29, and 0.15 mm/year in the NW, SE, NE, and SW of Australia, respectively. These results suggest that we detected real spatial variability in time-fixed components of VLM, calling into question the adequacy of GPS VLM Kriging (interpolating comparatively short records) and GIA to any given TG location in the region. As an alternate hypothesis, the differential oceanographic trends at least partially bias our VLMs that subsequently enforces the reduction of the spatial variability of ASL estimates across the region.
We estimated an average rate of ASL rise at TGs to be + 3.40 ± 0.34 mm/year, which is well supported by the average estimate of + 3.51 ± 0.26 mm/year from ALT records at CPs (as expected). The ALT rates were computed after applying the time-variable altimeter systematic errors (Fig. 6) as well as relative intra- and inter-mission biases (Figs. S17 and S18). There appeared to be a slight (but insignificant) SE-NW gradient in ASL trends (+ 3.24 ± 0.33 to + 3.83 ± 0.69 mm/year) with the North and North-West areas exposed to the higher rates, potentially in response to the ENSO-related effects (White et al. 2014). Compared to the large spatial gradient in trends described by White et al. (2014), our estimates show a reduction in the regional variability of ASL around Australia (especially in the spatial gradient as described above), likely less influenced by ENSO-related effects due to the 10 year increase in the data span in our study. Having adjusted for the effects of changing ocean volume caused by GIA (Peltier 2004), our average rates of sea-level rise increased to + 3.80 ± 0.34 and + 3.87 ± 0.23 mm/year for TG and ALT records, respectively, which are ~ 1.0 mm/year higher than that from White et al. (2014) who used data up to the end of 2010. These suggest the potential of an acceleration in sea-level around Australia, consistent with findings across the Oceania region from Wang et al. (2021). Our adjusted ASL estimates also appeared marginally higher than the global rate of sea-level rise (+ 3.40 ± 0.22 mm/year, over approximately the same time period, updated from Beckley et al. 2017).
Our approach suggests small but significant systematic errors in the Australian altimeter records, with the potential of nonlinear variability over a mission lifespan. The time-variable behaviour of the estimated Jason-2 systematic error is noticeable and further supported by analysis of the absolute bias series from the Bass Strait altimeter validation facility (e.g. Watson et al. 2020), where a similar signal was observed and remained unexplained. We note that GPS records confirm that this signal is not associated with anomalously high VLM during this period. Beckley et al. (2012) reported a similar feature in Jason-2 data as part of an analysis that prompted improved time-variable gravity field modelling used in the process of precise orbit determination for the Jason-2 mission. Whether the atypically strong 2010–12 La Niña (see Fasullo et al. 2013) remains inadequately modelled by the low degree and order time-variable gravity field used in the orbit determination, or whether there was, for example, an alternate driver such as a common differential steric change between TG and CPs driven by enhanced continental water runoff/discharge, remains to be determined. Comparing solutions when the altimeter systematic errors were treated as time-fixed or time-variable quantities suggests that the magnitude of the bias drift anomaly with Jason-2 was at least partly influenced by the extent to which continental loadings are expressed in VLM (Figs. S26 and S27). There were no other comparably large ENSO events (which involved a constructive alignment of various modes of climate that influence the Australian TWS, e.g. Fasullo et al. 2013) over the study period to enable further comparison or investigation. The Envisat mission had also finished by this time preventing further cross-calibration to isolate the cause. Other drivers such as residual errors in precise orbit determination and the impact of mismodelled geocenter motion cannot be ruled out (e.g. Belli et al. 2021; Couhert et al. 2018, 2020).
As with previous ALT-TG studies, this work remains predicated on the hypothesis that there is no significant trend in the difference of absolute sea-level between TG and ALT (CP) measurement locations. Oceanographic signals are expected to differ between the coastal and offshore locations driven by a range of local-scale influences such as wind stress, river runoff and coastally-trapped propagations as well as large-scale effects associated with circulation (e.g. Ponte et al. 2019). In particular, it is well known that Australia’s east coast is dominated by the energetic western boundary system, the East Australian Current (EAC, e.g. Cetina-Heredia et al. 2014; Ridgway and Hill 2009). The EAC flows southward interacting with bathymetry and water masses well offshore, moving on and off the continental shelf cyclically with likely impact on the on-shelf circulation (Archer et al. 2017). The extension of the EAC (~ 31–33°S) has strengthened and extended further southward along Australia's south-eastern coast, becoming warmer and saltier (e.g. Johnson et al. 2011; Suthers et al. 2011), leading to higher-than-average rates of sea-level rise well off the shelf. The extent to which these highly variable ocean-dynamics influence gradients across the narrow shelf coast is uncertain. Such gradients have the potential to contribute to the residual trends in the ATG differences considered in the region.
Our investigation reveals that the residual trends of absolute sea-level driven by differential ocean signals may at least partially contribute to what we inferred to as localized TG VLM, despite the siting of chosen TGs mostly in locations well connected to the open ocean. The FORT gauge is an interesting example which sits adjacent to the narrow shelf and in close proximity to the intensifying EAC. For this TG, ~ 69% and ~ 13% of the Jason-series and Envisat-series CPs were located off the continental shelf. Comparing the time-fixed VLM estimates of this gauge using solely the on- and off-shelf ATG combinations highlights the likely effect of sampling biases given a differential ASL rate of ~ 0.5 mm/year (Fig. 11).
Our investigation shows that the ATG noise increased as a function of the CP distance from the coast or TGs, in which the highest magnitudes were often associated with the CPs off the narrow shelf in the EAC as discussed above (Figs. 9, 10 and 11). We also found the largest noise magnitudes were mostly associated with TGs installed in high-latitude regions that are more exposed to the climate-induced TWS variability (consistent with noise analysis by Burgette et al. 2013; White et al. 2014). This increased noise may be driven by the unique coastal geometry of these shallow-shelf areas, and the possible impact of various shelf-based resonances in the region. We note that the increased noise associated with these CPs is inherently incorporated into the Kalman engine with the effect of down-weighting the respective ATG series in the solution adjustment, as compared to those formed with CPs located well on the shelf with reduced noise amplitudes. Thus, we consider the ~ 0.5 mm/year difference in VLM as mentioned above to be an upper bound of residual trends in the ASL estimates using only on- and off-shelf CPs, for the dataset used here.
Owing to the likely impacts of residual oceanography, our estimates of nonlinear VLM showed high variability between some TGs and the nearby GPS, particularly those located in the geometrically complex coastal regions. Therefore, our approach was not able to capture subtle geophysical signals such as the far-field post-seismic relaxation of the North-West coast as identified in GPS data by Riddell et al. (2021). Site-by-site inspection reveals that there was a spatial coherence in the variability of the nonlinear TG VLMs and the ATG noise for TGs in the North and North-West regions (Fig. 10). These emphasize that the localized variability at some TGs was likely contaminated with residual oceanographic signals (Figs. S12–S16). Conversely, the stacks of nonlinear VLM estimates at TG and GPS sites show quite comparable variability (Fig. 5, and Figs. S8–S11), indicating the method had some skill in capturing the common-mode deformation around the continent likely driven by surface loadings.
The impact of differential oceanographic signals was somewhat mitigated by adding non-reference-mission data with the spatial sampling typically closer to the gauge locations and with the higher percentage of CPs located well on the shelf. Given the reduced noise of the ATG observations pertaining to on-shelf CPs (Fig. 11), we benefited from including all altimeter missions in the integrated solution (see Supplementary Sect. S2.4.1 and Figs. S21–S25). Regardless of the advantages of the multi-mission solution, in many cases we continue to lack ALT data adjacent to the TG locations (hence coastal retracking has only limited benefit). This returns us to the vexing question of sampling the same ocean signals, which is a hard limit on the utility of all ATG-type techniques in fully resolving site-specific VLM and its evolution in the regions with complex geometry, narrow shelf widths and dynamic oceanic conditions. This also underscores the inherent challenge of separating the temporal evolution of the altimeter systematic errors from localized variability in the final step of our multi-stage solution strategy.
Like all Kalman-type engines, our approach requires appropriate settings and tuning for measurement noise and random-walk process noise within the context of the study region and our a priori assumptions. In contrast to the initial work by Rezvani et al. (2021), we considered a more flexible functional model for VLM, with the inclusion of nonlinear variability besides the linear movements. As opposed to the TG VLMs, the estimated bias drifts were thus quite unaffected by either small unresolved datum shifts below our detection resolution or residual oceanographic signals, which is an advance of the recently developed approach. Our approach could be further improved to remove the harmonic ocean tides given we only considered the standard 34 constituents (including M4) in our analysis, as used by FES2014b. The effects of internal tides were also not considered yet would likely contribute to the ATG noise in some regions around Australia (particularly at some CPs located offshore of the NW coast). Overall, the enhancements presented here potentially makes the technique applicable to tectonically highly dynamic areas exposed to abrupt changes in VLM signals either due to sudden ice-mass loss or large earthquakes.
6 Conclusions
We developed a Kalman-based methodology to simultaneously estimate site-specific VLM and altimeter-specific systematic errors around Australia since the early 1990s using ALT minus TG, tandem/dual crossover, and GPS height series. To cope with singularity of the underlying problem, we gradually separated the highly correlated unknowns in the presence of noise across space and time. The presented method advances the ATG technique by (1) assimilating multi-mission records; (2) exploring nonlinearity in both altimeter drift and VLM terms; and (3) assessing the likely contribution of residual oceanographic signals by considering altimeter measurements located ‘on’ and ‘off’ narrow shelf regions.
Our approach confirms the widespread subsidence of the Australian coast that is not explained by GIA alone, with the weighted average rates of – 0.10, – 0.38, – 0.95 and – 0.62 mm/year for GPS sites in the NW, NE, SW and SE sub-regions, respectively (note the result in the SW region is affected by localized anthropogenic signals across the Perth basin). We detected localized VLM trends at some TGs, relative to velocities from nearby GPS sites located within 15 km (STD of 0.81 mm/year, and WRMSE of 0.73 mm/year), with typical uncertainties of 0.71 and 0.87 mm/year for the ALT-TG and GPS-Krig estimates, respectively. Our TG VLMs generally improved the spatial coherency in the resultant ASL trends, with a ~ 42% and ~ 48% decrease in the RMSE of a fitted quadratic polynomial per latitudes reduced to the SE-NW direction, compared to the GPS-Krig and GIA rates, respectively. These suggest that Kriging interpolation of velocities from existing GPS sites and GIA predictions to any given TG location will be inadequate for the purpose of ASL determination. An alternate interpretation is that residual trends in absolute sea-level between the TG and ALT CP locations, driven by differential oceanographic signals, were biasing the estimated VLMs and artificially imposing the altimeter ASL on the TG locations, therefore reducing the variability of ASL at TG sites.
Our approach enables some interrogation of the often-held assumption of zero residual trend in the ATG observations. We found the high ATG noise pertaining to the Jason-series were generally associated with CPs located off narrow continental shelves and well separated from the coast. The opposite was the case for non-reference-mission ATG series given their location well on the shelf and closer to TGs (owing to their different ground-track spacing). The FORT gauge provides an interesting example given its location adjacent to a complex western boundary current system and narrow shelf widths (~ 25 km, Cresswell et al. 2017). VLMs for this gauge computed using only on- and off-shelf CPs revealed residual difference of ~ 0.5 mm/year. The relatively low magnitude of these differences adds weight to the ability of our filter to adequately down-weight observations form noisier CPs and separate the signal from noise. These effects do, however, hinder the ability to resolve small site-specific nonlinear VLM such as the small post-seismic relaxation signal along the NW Australian coast as identified by Riddell et al. (2021).
The application of our VLM estimates to TG RSL yield an average ASL rate of + 3.40 ± 0.34 mm/year at TGs, unsurprisingly in close agreement with the average estimate of + 3.51 ± 0.26 mm/year derived from ALT alone at our CP locations. Our use of an additional ~ 10 years of data (~ 27 years in total) attenuated the effect of ENSO on the ASL gradient across Australia as earlier reported by White et al. (2014). After adjusting the GIA-induced ocean volume changes, our average rate of sea-level rise is noticeably higher than that from White et al. (2014), suggesting an acceleration in sea-level consistent with findings across the Oceania region from Wang et al. (2021).
We detected small but significant altimeter-specific drifts (ranging from –1.09 mm/year for Jason-1 to + 4.80 mm/year for TOPEX-side B), which are consistent with the geographically coherent differences between the leading orbit solutions over single mission durations (e.g. Belli et al. 2021; Couhert et al. 2015, 2018, 2020). The altimeter-specific drifts had a negligible effect on the average rate of regional sea-level change over the full altimetry era. We identified an anomaly in the early period (~ 2008.5–2012) of the regional Jason-2 performance, which was also observed and remained unexplained in results from the Bass Strait altimeter validation facility (Watson et al. 2020). Further work is required to investigate and attribute this signal (e.g. assess possible inadequate representation of the anomalously large 2010–2012 La Niña event and its potential impact on orbit determination).
The separation of site-specific, nonlinear VLM at TGs from mission-specific, nonlinear systematic errors in altimetry in the Australian region is challenging given the potential for ENSO-related variability in both, as well as in the ATG observations (particularly for those with large separation distances as mentioned above). Our approach does however provide useful insight into placing bounds on potential spatial and temporal variability of regional altimeter errors, VLM and ASL around the Australian coast.
The limitations of the ALT-TG approach, especially in areas with narrow continental shelves, emphasize the ongoing need to install GPS directly at the TG or the nearest feasible locations (Woodworth et al. 2016). There is also an ongoing need to further develop high-resolution regional ocean models that resolve a full suite of coastal ocean processes (Ponte et al. 2019). Such models are presently unavailable for Australian shelf waters, and hence are unable to be utilised here. Our data-driven approach can be implemented in other study regions to examine nonlinear VLM for geophysical studies, and to test the assumption of zero-differential VLM between the TG and nearby GPS sites. Such investigations will assist in further advancing the understanding of impacts of climate change on regional and global sea-level change.
Data availability
The altimeter, TG, and GPS datasets used in this study are publicly available through https://github.com/remkos/rads, http://www.bom.gov.au/metadata/catalogue/search.shtml?page=5, and http://geodesy.unr.edu/, respectively. Dynamic atmospheric Corrections are produced by CLS using the Mog2D model from Legos and distributed by Aviso + , with support from CNES (https://www.aviso.altimetry.fr/). The ICE6G_D GIA model is available through http://www.atmosp.physics.utoronto.ca/%7Epeltier/data.php.
References
Ablain M, Cazenave A, Larnicol G, Balmaseda M, Cipollini P, Faugère Y et al (2015) Improved sea level record over the satellite altimetry era (1993–2010) from the climate change initiative project. Ocean Sci 11(1):67–82. https://doi.org/10.5194/os-11-67-2015
Altamimi Z, Collilieux X, Métivier L (2011) ITRF2008: an improved solution of the international terrestrial reference frame. J Geod 85:457–473. https://doi.org/10.1007/s00190-011-0444-4
Archer MR, Roughan M, Keating SR, Schaeffer A (2017) On the variability of the East Australian current: jet structure, meandering, and influence on shelf circulation. J Geophys Res Oceans 122:8464–8481. https://doi.org/10.1002/2017JC013097
Beckley BD, Callahan PS, Hancock DW, Mitchum GT, Ray RD (2017) On the “cal-mode” correction to TOPEX satellite altimetry and its effect on the global mean sea level time series. J Geophys Res Oceans 122(11):8371–8384. https://doi.org/10.1002/2017jc013090
Beckley BD, Zelensky NP, Yang X, Melachroinos S, Chinn D, Lemoine FG, Ray RD, Brown S, and Mitchum G (2012) Reassessment of Jason-2 stability based on revised POD standards. In: ocean surface topography science team meeting 2012. Retrieved from https://www.aviso.altimetry.fr/fileadmin/documents/OSTST/2012/oral/01_thursday_27/05_regional_and_global_calval_II/06_CV2_Beckley.pdf
Belli A, Zelensky NP, Lemoine FG, Chinn DS (2021) Impact of Jason-2/T2L2 ultra-stable-oscillator frequency model on DORIS stations coordinates and earth orientation parameters. Adv Space Res 67(3):930–944. https://doi.org/10.1016/j.asr.2020.11.034
Bevis M, Brown A (2014) Trajectory models and reference frames for crustal motion geodesy. J Geodesy 88(3):283–311. https://doi.org/10.1007/s00190-013-0685-5
Blewitt G, Hammond WC, Kreemer C (2018) Harnessing the GPS data explosion for interdisciplinary science. Eos 99:485. https://doi.org/10.1029/2018EO104623
Blewitt G (2003) Self-consistency in reference frames, geocenter definition, and surface loading of the solid Earth. J Geophys Res, 108(B2). https://doi.org/10.1029/2002JB002082
Boening C, Willis JK, Landerer FW, Nerem RS, Fasullo J (2012) The 2011 La Niña: So strong, the oceans fell. Geophys Res Lett 39:L19602. https://doi.org/10.1029/2012GL053055
Bos MS, Fernandes RMS, Williams SDP, Bastos L (2013) Fast Error analysis of continuous GNSS Observations with missing data. J Geod 87(4):351–360. https://doi.org/10.1007/s00190-012-0605-0
Bouin M-N, Wöppelmann G (2010) Land motion estimates from GPS at tide gauges: a geophysical evaluation. Geophys J Int 180(1):193–209. https://doi.org/10.1111/j.1365-246X.2009.04411.x
Burgette RJ, Watson CS, Church JA, White NJ, Tregoning P, Coleman R (2013) Characterizing and minimizing the effects of noise in tide gauge time series: relative and geocentric sea level rise around Australia. Geophys J Int 194(2):719–736. https://doi.org/10.1093/gji/ggt131
Cetina-Heredia P, Roughan M, van Sebille E, Coleman MA (2014) Long-term trends in the East Australian Current separation latitude and eddy driven transport. J Geophys Res Oceans 119:4351–4366. https://doi.org/10.1002/2014JC010071
Codiga DL (2011) Unified tidal analysis and prediction using the UTide Matlab functions. In: technical report 2011–01, graduate school of oceanography, university of Rhode Island, Narragansett, RI. 59 pp. Retrieved from ftp://www.po.gso.uri.edu/pub/downloads/codiga/pubs/2011Codiga-UTide-Report.pdf
Couhert A, Cerri L, Legeais JF, Ablain M, Zelensky NP, Haines BJ, Lemoine FG, Bertiger WI, Desai SD, Otten M (2015) Towards the 1 mm/y stability of the radial orbit error at regional scales. Adv Space Res 55(1):2–23. https://doi.org/10.1016/j.asr.2014.06.041
Couhert A, Mercier F, Moyard J, Biancale R (2018) Systematic error mitigation in DORIS-derived geocenter motion. J Geophys Res: Solid Earth 123:10,142–10,161. https://doi.org/10.1029/2018JB015453
Couhert A, Delong N, Ait-Lakbir H, Mercier F (2020) GPS-based LEO Orbits referenced to the Earth’s center of mass. J Geophys Res Solid Earth 125(2):e2019JB018293. https://doi.org/10.1029/2019JB018293
Cresswell GR, Peterson JL, Pender LF (2017) The East Australian Current, upwellings and downwellings off eastern-most Australia in summer. Mar Freshw Res 68(7):1208–1223. https://doi.org/10.1071/MF16051
Dangendorf S, Marcos M, Müller A, Zorita E, Riva R, Berk K, Jensen J (2015) Detecting anthropogenic footprints in sea level rise. Nat Commun 6:7849. https://doi.org/10.1038/ncomms8849
Desai S, Wahr J, Beckley B (2015) Revisiting the pole tide for and from satellite altimetry. J Geodesy 89(12):1233–1243. https://doi.org/10.1007/s00190-015-0848-7
Fasullo JT, Boening C, Landerer FW, Nerem RS (2013) Australia’s unique influence on global sea level in 2010–2011. Geophys Res Lett 40:4368–4373. https://doi.org/10.1002/grl.50834
Featherstone WE, Penna NT, Filmer MS, Williams SDP (2015) Nonlinear subsidence at Fremantle, a long-recording tide gauge in the Southern Hemisphere. J Geophys Res Oceans 120:7004–7014. https://doi.org/10.1002/2015JC011295
Fu L-L, Haines BJ (2013) The challenges in long-term altimetry calibration for addressing the problem of global sea level change. Adv Space Res 51(8):1284–1300. https://doi.org/10.1016/j.asr.2012.06.005
Grewal MS, Andrews AP (2008) Kalman filtering: theory and practice using MATLAB®, 3rd edn. WILEY, New York. https://doi.org/10.1002/9780470377819
Hamlington BD, Thompson P, Hammond WC, Blewitt G, Ray RD (2016) Assessing the impact of vertical land motion on twentieth century global mean sea level estimates. J Geophys Res Oceans 121:4980–4993. https://doi.org/10.1002/2016JC011747
Hammond WC, Blewitt G, Kreemer C, Nerem RS (2021) GPS Imaging of global vertical land motion for studies of sea level rise. J Geophys Res Solid Earth 126:e2021JB022355. https://doi.org/10.1029/2021JB022355
Han S-C (2017) Elastic deformation of the Australian continent induced by seasonal water cycles and the 2010–2011 La Niña determined using GPS and GRACE. Geophys Res Lett 44:2763–2772. https://doi.org/10.1002/2017GL072999
Johnson CR, Banks SC, Barrett NS, Cazassus F, Dunstan PK, Edgar GJ, Frusher SD, Gardner C, Haddon M, Helidoniotis F, Hill KL, Holbrook NJ (2011) Climate change cascades: shifts in oceanography, species’ ranges and subtidal marine community dynamics in eastern Tasmania. J Exp Mar Biol Ecol 400(1–2):17–32. https://doi.org/10.1016/j.jembe.2011.02.032
King MA, Keshin M, Whitehouse PL, Thomas ID, Milne G, Riva REM (2012) Regional biases in absolute sea-level estimates from tide gauge data due to residual unmodeled vertical land movement. Geophys Res Lett 39(14):14604. https://doi.org/10.1029/2012gl052348
Lyard FH, Allain DJ, Cancet M, Carrère L, Picot N (2021) FES2014 global ocean tide atlas: design and performance. Ocean Sci 17(3):615–649. https://doi.org/10.5194/os-17-615-2021
Maronna RA, Martin RD, Yohai VJ (2006) Robust statistics, theory and methods. Wiley, New York. https://doi.org/10.1002/0470010940
McGrath GS, Sadler R, Fleming K, Tregoning P, Hinz C, Veneklaas EJ (2012) Tropical cyclones and the ecohydrology of Australia’s recent continental-scale drought. Geophys Res Lett 39:L03404. https://doi.org/10.1029/2011GL050263
Nerem RS, Mitchum GT (2002) Estimates of vertical crustal motion derived from differences of TOPEX/POSEIDON and tide gauge sea level measurements. Geophys Res Lett 29(19):41–44. https://doi.org/10.1029/2002gl015037
Nerem RS, Beckley BD, Fasullo JT, Hamlington BD, Masters D, Mitchum GT (2018) Climate-change–driven accelerated sea-level rise detected in the altimeter era. Proc Natl Acad Sci USA 115(9):2022–2025. https://doi.org/10.1073/pnas.1717312115
Peltier WR (2004) Global glacial isostasy and the surface of the Ice-Age earth: The ICE-5G(VM2) model and GRACE. Annu Rev Earth Planet Sci 2004(32):111–149. https://doi.org/10.1146/annurev.earth.32.082503.144359
Peltier WR, Argus DF, Drummond R (2018) Comment on an assessment of the ICE-6G_C (VM5a) glacial isostatic adjustment model by purcell et al. J Geophys Res Solid Earth 123(2):2019–2028. https://doi.org/10.1002/2016JB013844
Pfeffer J, Spada G, Mémin A, Boy J, Allemand P (2017) Decoding the origins of vertical land motions observed today at coasts. Geophys J Int 210(1):148–165. https://doi.org/10.1093/gji/ggx142
Ponte RM, Carson M, Cirano M, Domingues CM et al (2019) Towards comprehensive observing and modeling systems for monitoring and predicting regional to coastal sea level. Front Mar Sci. https://doi.org/10.3389/fmars.2019.00437
Raucoules D, Le Cozannet G, Wöppelmann G, de Michele M, Gravelle M, Daag A, Marcos M (2013) High nonlinear urban ground motion in Manila (Philippines) from 1993 to 2010 observed by DIn-SAR: Implications for sea-level measurement. Remote Sens Environ 139:386–397. https://doi.org/10.1016/j.rse.2013.08.021
Rezvani M-H, Sabbagh A, Ardalan AA (2015) Robust automatic reduction of multibeam bathymetric data based on M-estimators. Marine Geod 38(4):327–344. https://doi.org/10.1080/01490419.2015.1053639
Rezvani M-H, Watson CS, King MA (2021) Estimating vertical land motion and residual altimeter systematic errors using a Kalman-based approach. J Geophys Res Oceans. 126(6):e2020JC017106. https://doi.org/10.1029/2020JC017106
Riddell AR, King MA, Watson CS (2021) Ongoing postseismic vertical deformation of the Australian continent from far-field earthquakes. Earth Space Sci Open Arch. https://doi.org/10.1002/essoar.10504158.1
Riddell AR, King MA, Watson CS (2020) Present-day vertical land motion of Australia from GPS observations and geophysical models. J Geophys Res Solid Earth 125:e2019JB018034. https://doi.org/10.1029/2019JB018034
Ridgway K, Hill K (2009) The East Australian Current. In: Poloczanska ES, Hobday AJ, Richardson AJ (eds) A marine climate change impacts and adaptation report card for Australia 2009. NCCARF Publication
Santamaría-Gómez A, Mémin A (2015) Geodetic secular velocity errors due to interannual surface loading deformation. Geophys J Int 202(2):763–767. https://doi.org/10.1093/gji/ggv190
Santamaría-Gómez A, Gravelle M, Collilieux X, Guichard M, Míguez MB, Tiphaneau P, Wöppelmann G (2012) Mitigating the effects of vertical land motion in tide gauge records using state-of-the-art GPS velocity field. Global Planet Change 98–99:6–17. https://doi.org/10.1016/j.gloplacha.2012.07.007
Scharroo R, Leuliette EW, Lillibridge J L, Byrne D, Naeije MC, and Mitchum GT (2013) RADS: Consistent multi-mission products, In: proceedings symposium on 20 years of progress in radar altimetry, European Space Agency, Special Publication SP–710
Sun Y, Riva REM (2020) A global semi-empirical glacial isostatic adjustment (GIA) model based on gravity recovery and climate experiment (GRACE) data. Earth Syst Dyn 11:129–137. https://doi.org/10.5194/esd-11-129-2020
Suthers IM, Young JW, Baird ME, Roughan M, Everett JD, Brassington GB, Byrne M, Condie SA, Hartog JR, Hassler CS, Hobday AJ, Holbrook NJ (2011) The strengthening East Australian Current, its eddies and biological effects–an introduction and overview. Deep-Sea Res Part II Topical Stud Oceanograph 58(5):538–546. https://doi.org/10.1016/j.dsr2.2010.09.029
Tian Y, Shen Z-K (2016) Extracting the regional common-mode component of GPS station position time series from dense continuous network. J Geophys Res Solid Earth 121(2):1080–1096. https://doi.org/10.1002/2015JB012253
Tregoning P, Watson CS, Ramillien G, McQueen H, Zhang J (2009) Detecting hydrologic deformation using GRACE and GPS. Geophys Res Lett 36:L15401. https://doi.org/10.1029/2009GL038718
Tregoning P, Watson C (2009) Atmospheric effects and spurious signals in GPS analyses. J Geophys Res Solid Earth 114(9):B09403. https://doi.org/10.1029/2009JB006344
Wang J, Church JA, Zhang X, Chen X (2021) Reconciling global mean and regional sea level change in projections and observations. Nat Commun 12(1):990. https://doi.org/10.1038/s41467-021-21265-6
Watson PJ (2020) Updated mean sea-level analysis: Australia. J Coastal Res 36(5):915–931. https://doi.org/10.2112/JCOASTRES-D-20-00026.1
Watson CS, Burgette R, Tregoning P, White N, Hunter J, Coleman R, Handsworth R, Brolsma H (2010) Twentieth century constraints on sea level change and earthquake deformation at Macquarie Island. Geophys J Int 182(2):781–796. https://doi.org/10.1111/j.1365-246X.2010.04640.x
Watson CS, White NJ, Church JA, King MA, Burgette RJ, Legresy B (2015) Unabated global mean sea-level rise over the satellite altimeter era. Nat Clim Chang 5(6):565–568. https://doi.org/10.1038/nclimate2635
Watson CS, Legresy B, Beardsley J, Zhou A, and King MA (2020) Altimeter validation results from the Bass Strait validation facility, Australia. In: ocean surface topography science team meeting 2020, virtual forum. Retrieved from https://ostst.aviso.altimetry.fr/fileadmin/user_upload/tx_ausyclsseminar/files/OSTST2020_Absolute_Bias_Watson_et_al.pdf
White NJ, Haigh ID, Church JA, Koen T, Watson CS, Pritchard TR, Watson PJ, Burgette RJ, McInnes KL, You Z-J, Zhang X, Tregoning P (2014) Australian sea levels—Trends, regional variability and influencing factors. Earth Sci Rev 136:155–174. https://doi.org/10.1016/j.earscirev.2014.05.011
Williams SDP, Bock Y, Fang P, Jamason P, Nikolaidis RM, Prawirodirdjo L, Miller M, Johnson DJ (2004) Error analysis of continuous GPS position time series. J Geophys Res Solid Earth 109(3):1–19. https://doi.org/10.1029/2003JB002741
Woodworth PL et al. (2016). Manual on sea-level measurements and interpretation, volume v: radar gauges. Paris, intergovernmental oceanographic commission of UNESCO. 104 pp & supplement 126 pp. (IOC manuals and guides No.14, vol. V; JCOMM technical report No. 89; (English)
Wöppelmann G, Letetrel C, Santamaria A, Bouin M.-N, Collilieux X, Altamimi Z et al (2009) Rates of sea-level change over the past century in a geocentric reference frame. Geophys Res Lett 36:L12607. https://doi.org/10.1029/2009gl038720
Wöppelmann G, Marcos M (2016) Vertical land motion as a key to understand sea level change and variability. Rev Geophys 54(1):64–92. https://doi.org/10.1002/2015rg000502
Wöppelmann G, Pouvreau N, Coulomb A, Simon B, Woodworth PL (2008) Tide gauge datum continuity at Brest since 1711: France’s longest sea-level record. Geophys Res Lett 35:L22605. https://doi.org/10.1029/2008GL035783
Wu X, Ray J, van Dam T (2012) Geocenter motion and its geodetic and geophysical implications. J Geodyn 58:44–61. https://doi.org/10.1016/j.jog.2012.01.007
Acknowledgements
This research was supported under the Australian Research Council’s Special Research Initiative for Antarctic Gateway Partnership (Project ID SR140300001). Aspects of this work were also supported by the Australian Research Council Discovery Project DP150100615. This work has benefitted from the Bass Strait altimeter validation facility which is supported by Australia’s Integrated Marine Observing System (IMOS) – IMOS is enabled by the National Collaborative Research Infrastructure Strategy (NCRIS). IMOS is operated by a consortium of institutions as an unincorporated joint venture, with the University of Tasmania as Lead Agent. Access to the Radar Altimeter Database System (RADS), local tide gauge, Nevada Geodetic Laboratory (NGL) databases and ICE6G_D model are appreciated. We acknowledge the TPAC High Performance Computing facilities used for computations. We acknowledge discussions held with Benoit Legresy and Richard Coleman which were useful in preparing this manuscript. The authors thank Michael Schindelegger (Editor) and anonymous reviewers for their constructive comments that helped to improve this manuscript.
Funding
Open Access funding enabled and organized by CAUL and its Member Institutions. Australian Research Council’s Special Research Initiative for Antarctic Gateway Partnership, Project ID SR140300001, Mohammad-Hadi Rezvani, Australian Research Council, Discovery Project DP150100615, Mohammad-Hadi Rezvani, Australian Research Council, Discovery Project DP150100615, Christopher S. Watson, Australian Research Council, Discovery Project DP150100615, Matt A. King.
Author information
Authors and Affiliations
Contributions
M.-H. Rezvani, C.S. Watson, and M.A. King designed research; M.-H. Rezvani and C.S. Watson performed research; M.-H. Rezvani analysed data; M.-H. Rezvani, C.S. Watson, and M.A. King wrote and revised the manuscript.
Corresponding author
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Rezvani, MH., Watson, C.S. & King, M.A. Vertical deformation and residual altimeter systematic errors around continental Australia inferred from a Kalman-based approach. J Geod 96, 96 (2022). https://doi.org/10.1007/s00190-022-01680-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00190-022-01680-3