
Abstract
In many aquatic taxa, formation traveling can reduce the energetic expenditure of locomotion by exploiting the vorticity trails shed by neighbors or through drafting. Cetaceans, especially odontocetes, often swim in groups; nevertheless, the possibility that whales gain energetic benefits from swimming in formation remains poorly studied, apart from mother-calf pairs. Between June and September in 2019 and 2021, we recorded aerial videos of Southern Resident killer whales (Orcinus orca) in the Salish Sea (USA) travelling in groups. We estimated whale tailbeat and breathing frequencies as proxies of the relative energetic costs of swimming, and tested the effect of swimming speed, relative positioning (e.g., leaders, whales in the middle of groups, or followers), sex and estimated size on these observed proxies. Our results reveal a complex relationship between physical characteristics, relative positioning, and energetic proxies. Intervals between respiration lasted longer in large-sized trailing individuals, but the overall breathing frequency was similar for all whales regardless of their position. The tailbeat frequency was mainly associated to whale sex, size, and swimming speed; in addition, tailbeat frequency showed a decreasing trend as the number of individuals in the formation increased. We found moderate evidence that position-based energetic effects may be present in the formation swimming of killer whales, and it is likely that additional factors such as social ties and hierarchies, play a key role in determining individual positioning in travelling groups.
Significance
Swimming in formation has been extensively studied in fish and other aquatic animals and has been documented to provide energetic advantages. Our understanding of the potential energetic benefits of wild cetacean formation swimming has been constrained by the difficulties of studying the movement of whale groups from traditional observation platforms. In recent years, non-invasive observations of cetaceans using unoccupied aerial systems have significantly improved the observation of these species in the wild, providing an exciting opportunity to better understand their behaviors and habits. Our results show a tendency for formation swimming to affect two energetic proxies (tailbeat frequency and the duration of underwater intervals between surfacing events). The results of this study set the stage for further research to identify the multiple determinants affecting killer whale formation swimming which go beyond purely energetic advantages, e.g. social relationships.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Living in groups can provide animals with numerous benefits, such as lower vulnerability to predators or higher feeding efficiency (Krause and Ruxton 2002; Acevedo-Gutierrez 2009), greater navigational abilities through collective decision making (Simons 2004), and the possibility of sharing knowledge and skills (Riesch et al. 2006; Ashton et al. 2019). A further potential benefit for groups is reduced cost of locomotion during travelling. For aquatic species, individuals swimming in groups may exhibit “drafting” i.e., exploiting zones of low pressure beside their neighbors (Weihs 2004), and may take advantage of the vorticity shed by swimming neighbors (Fish 1999). The energetic advantages of moving in groups have been demonstrated in multiple taxa, including crustaceans (Bill and Herrnkind 1976) and birds (Fish 1995; Weimerskirch et al. 2001; Portugal et al. 2014), and have been widely studied in fish schools (Fish 1999; Liao 2022). Trailing individuals within a fish school were found to experience lower drag and gain an energetic benefit by exploiting the vortices from the side-by-side thrust wakes shed by their neighbors (i.e., exploiting the reverse Kármán vortex street; Herskin and Steffensen 1998; Marras et al. 2015; Li et al. 2020; Saadat et al. 2021).
Like fish, many species of marine mammals typically travel in groups (Norris and Johnson 1994; Simard and Gowans 2008; Santos et al. 2019; Dans et al. 2022). Cetaceans are known to adopt a number of swimming strategies aimed at reducing their cost of transport, such as exploiting the thrust of natural waves or those created at the bows of boats (Williams et al. 1992; Würsig 2009). In addition, cetaceans may alternate high-speed swimming with ballistic jumps to take advantage of the reduced drag they experience while leaping out of water (“porpoising”; Weihs 2002). Nevertheless, the energetic advantages of cetacean formation swimming have been widely analyzed only in mother-calf pairs, and it has been documented that calves can reduce their locomotion costs by swimming alongside their mothers in echelon position (Fish and Rohr 1999; Weihs 2004; Noren et al. 2008; Noren and Edwards 2011; Shoele and Zhu 2016). Feeding adult bowhead whales (Balaena mysticetus) have also been observed swimming in echelon position (Fish et al. 2013), which was suggested to provide energetic benefits. Nevertheless, our knowledge about cetacean formation swimming is hampered by the difficulty of studying these mammals in the wild from traditional observation platforms (e.g., observations from a research vessel). Although the use of individual tags provide interesting details on the swimming energetics and swimming pattern of many cetaceans (Aoki et al. 2007; Durban and Deecke 2011; Segre et al. 2019; Watanabe and Goldbogen 2021), these techniques usually do not provide direct data on entire groups. Aerial observations with unoccupied aerial systems (UAS) have allowed researchers to follow formations of travelling whales with high-definition footages (Fiori et al. 2017; Hartman et al. 2020; Chung et al. 2022).
We focused on the endangered Southern Resident killer whale population (Orcinus orca, SRKW) in the northeastern Pacific Ocean, which has been studied for decades and is closely monitored given its endangered population status in both U.S. and Canada (Krahn et al. 2004; Fisheries and Oceans Canada 2021; National Marine Fisheries Service 2021). Because individuals can be consistently identified and repeatedly sampled, this population represents a potentially powerful model system to study formation swimming in wild cetaceans. This population is composed of 75 individuals at the time of writing, which can be individually recognized from natural markings from aerial observations (Weiss et al. 2021b), and comprises three cohesive pods (J, K, and L pod), which are sub-structured into closely bonded matrilineal social units (Parsons et al. 2009; Center for Whale Research 2023).
Here we aimed to test the hypothesis that traveling in formation reduces the cost of locomotion in trailing individuals in cetaceans, in line with similar findings on other aquatic animals (Fish 1999). For this purpose, we quantified the relative energetic costs of individual killer whales occupying different positions in a swimming formation (i.e., differentiating between leading individuals and trailing individuals) by considering the following energetic proxies: the tailbeat frequency, the breathing frequency, and the duration of the underwater intervals between surfacing events.
We hypothesize that trailing whales within a formation, both pure followers at the rear of groups and individuals in the middle of groups, display a lower frequency of both tail beating and breathing (therefore longer intervals between emersions) compared to leading individuals at any given swimming speed.
Methods
The SRKW were observed between June and September in 2019 and 2021 through aerial surveys around the San Juan Islands archipelago in the central Salish Sea (Supplementary Fig. 1). All drone flights were carried out with a DJI Phantom 4 Pro V2 quadcopter, under National Marine Fisheries Service federal permit (permit number 21238) whenever environmental conditions allowed data collection: i.e., in the absence of rain, with winds below 10 knots, and with a sea state below Beaufort 3. The aircraft was launched from a small research vessel at a distance of 100—400 m from groups of whales, and then flown at an altitude between 30 and 90 m. During these flights, we recorded high-definition videos of focal groups (3840 × 2160 format, 30 frames-per-second). The recording of each video started as soon as the whales were visible in the filming frame of the drone’s camera and was continued as long as they remained observable. Videos were stopped if whales dove and were no longer visible, when physical obstacles in the field did not allow the flight to continue (e.g., the presence of other vessels or seal haul outs in the area), or due to the drone’s battery life. In parallel, the aircraft recorded flight data, including latitude, longitude, altitude above take off, and camera pitch, every tenth of a second.
All data were collected in the wild from live animals, thus it was not possible to use blinded methods.
Video processing and data extraction
All video footage was processed on a 1920 × 1080 resolution screen through the software Kinovea (Charmant 2004). For the purposes of our study, we selected all the videos in which a group of at least three whales displayed a directional and regular cruising swimming pattern i.e., without sharp changes in direction, chasing prey, social interactions, or surface-active behaviors (e.g., breaches). Whales that were resting, i.e. not exhibiting any visible displacement were excluded from the analysis. Within each video, we identified as an analyzable sequence (hereafter sequence) the time frame in which whales’ swimming behavior met these established criteria. If additional whales joined the group after the start time of the sequence or were no longer visible before the end of the sequence, the period during which they were not visible was not considered for calculating their proxies (see below). All individuals in a selected sequence were identified prior to the video processing. Individuals were identified using unique markings and the size and shape of the saddle patch. Aerial images were compared to the individual photographic database available for this population at the Center for Whale Research (CWR), which provided information on age, sex and kinship for all individuals.
Swimming speed data
Swimming speed and body length were estimated using a series of frames captured every 10 s in each sequence. Positions were determined by marking individuals on both the rostrum tip and on the middle tip of the caudal flukes: points were set using xy-coordinates in pixels and transformed to coordinates which lied between -1 and 1 in both axes. These xy-points were matched with the flight logs recorded by the aircraft during the shooting to estimate the whale’s geographical position. The change in position between frames was used to estimate swimming speed. Specifically, the xy-positions of rostrum were imported into a custom three-dimensional trigonometry function in R Studio (R Core Team 2023) which considered the flight altitude above take off point, aircraft latitude and longitude, and camera shooting specifications (i.e. camera angle relative to the vertical, camera bearing relative to north, and horizontal and vertical field of view of the lens used).
Whales’ positions were first adjusted to balance the image distortion due to the shooting angle of the drone’s camera. We estimated the difference in position between the whale and the drone in both the vertical and horizontal dimensions. Whale y-coordinates were adjusted according to the vertical field of view of the camera, the framing angle, and the altitude of flight; whereas the x-coordinates were balanced by knowing the estimated whale-to-drone distance along the y axis, and depending on camera’s horizontal field of view and drone’s altitude The adjusted coordinates were used to estimate the GPS position of each whale knowing the GPS location of the drone (Supplementary Fig. 2 and detailed swimming speed data extraction in Supplementary Materials). Whale GPS positions obtained every 10 s were used to calculate the distance traveled in the time unit and then estimate both the average speed for each 10-s interval and the overall average speed for the entire sequence. However, given the error of our estimates of distances between xy-points from GPS locations, the calculated speeds were translated into body-lengths-per-second (BL/s) taking into account the estimated length of each individual within each sequence.
The adjusted xy-points derived from the custom three-dimensional trigonometry function were used to estimate the individual head-to-tail distance every 10 s. However, given the potential measurement variability over a sequence, due to water depth or the whale body position, the individual length was averaged within each sequence to increase the reliability of our estimation and provide a better analysis of the relationship between speed and energetic proxies (in particular that of tail beats; Webb et al. 1984; Fish 1998). In addition, we estimated the error in our lengths measurements by capturing drone images of an object of known size at the surface and at various known depths (Supplementary Table 1, errors range 3–24% in a depth range from 0.6 to 3.6 m).
Proxies of relative energetic costs
Breathing frequency (BF) was calculated in breaths-per-minute by counting the number of emersions of each individual, as soon as the blow puff started while surfacing. For individuals only visible during a portion of the sequence (e.g., joining the group after the start of a sequence or no longer visible before the end of the sequence), the periods during which they were not visible were not considered for calculating the proxies. Moreover, we followed whales breathing events also by timing the duration of each underwater interval (UI, in seconds), to take into account for possible shifts of individual positioning during a sequence (see below). For those whales that were visible only for part of a sequence (i.e., individuals which joined the formation after the starting time of a sequence, or which were no longer visible before the end of a sequence) we considered a reduced observation time to calculate the BF.
Tailbeats were measured by playing the video frame-by-frame and visually counting the number of swimming cycles per second (tailbeat frequency, TBF). The timing of each beat was traced with a stop-watch tool in the digitizing software, by identifying as tailbeat starting/ending point the moment in which the flukes reached the maximum elevation along the dorsoventral axis of the whale (based on the apparent shape of the flukes; Supplementary Fig. 3 and Supplementary Video 1). However, since underwater visibility did not always allow us to follow the tailbeats for the entire duration of a sequence, we opportunistically observed series of consecutive beats whenever the flukes were sufficiently visible. Moreover, given the short duration of the intervals in which the tailbeats were visible, TBF was measured in multiple intervals per sequence whenever possible, to achieve a more reliable estimation of swimming effort. The TBF data were then adjusted to avoid an overestimation of this proxy, by applying the criterion used by Kriete (1995) for tracking whale breathing: since the TBF tracking started and ended necessarily with a tailbeat, we calculated the TBF considering the observation time of each series without counting the first tailbeat to avoid overestimation of TBF. The BF intervals started instead at beginning of a sequence regardless of the occurrence of a surfacing event, thus not incurring in an overestimation of the number of surfacings over time.
Whale spatial arrangement
The BF, UI, and TBF were associated with each whale’s relative positioning data in order to test for the effect of whale position on the relative costs of swimming. Individuals which were at front of the formation were classified as pure leaders (L); trailing individuals which were not followed by other whales were identified as pure followers (F), and all individuals in the middle of the group which could be simultaneously leaders and followers relative to others in the group were categorized as middle-group whales (MG). Since the BF measurements were obtained from entire sequences within which position shifts could occur, for each BF observation, we established the modal positional category for each whale, i.e., the position maintained for longest time during the sequence. To account for potential effects due to temporary positioning shifts, we associated a positional category to each UI. Specifically, if a nearest neighbor shift occurred during an UI, this was divided into multiple portions according to the timing of the positioning shifts. We reported whether the surfacing event of a given individual occurred during an UI, or UI portion, while being in L, F, or MG position. The UI without position shifts were considered with a surfacing event occurring at the end, and only the final portion of a subdivided UI was classified as the one in which the surfacing event took place (Fig. 1a). TBF data were classified in the same way, according to the three positional categories and accounting for potential shifts in whale spatial arrangement as described above. Series of tailbeats in which there was a nearest neighbor shift were subdivided as done for the UI, and whenever a tailbeat straddled two portions this was considered part of the portion which comprised at least the 50% of its duration (Fig. 1b).

Outline of the methodology used to study energetic proxies in relation to the relative positioning of free ranging Southern Resident killer whales (Orcinus orca) during swimming in formation (aerial drone-based observations between June and September in 2019 and 2021). Panel A, the starting time of underwater intervals (UI) between consecutive emersions was set immediately after an emersion (t1) and lasted until the following surfacing event (t3). In case the focal orca (in black) changed its position relative to formation neighbor (as in t2), the interval was divided into portions UI 1 and UI 2; the ending time of portion UI 1 (t2) corresponded with the starting time of the portion UI 2. The final portion (UI 2) ended at t3 when a surfacing event took place. Panel B, observation of tail beats (TB) depending on positioning within the group. The point of maximum elevation of the flukes along whale dorsoventral axis was identified as the starting/ending point of each TB. In case a positioning shift occurred during the sequence, a first TB interval was considered ending with the positioning shift. When a given TB overlapped with two consecutive intervals, the interval considered was the one which lasted > 50% of the total duration of the TB (two examples, case I and case II, reported)
In addition, we calculated the lateral and longitudinal distance between neighboring whales for each UI and TBF measurement, since the proximity between whales could have affected their hydrodynamics, as showed by Rattanasiri et al. (2012) for the simulated motion of two underwater hulls near each other. We initially identified all pairs of nearest whales within a formation depending on the lateral distance between their heads. For each of these neighbor pairs, we calculated the longitudinal distance between their heads.
All measured proxies (i.e., BF, UI, and TBF), classified according to whale positioning, were also associated with the corresponding swimming speed of each proxy observation period. For BF measurements, we considered the average speed of an entire sequence, or of a reduced observation time in case the whale was visible for a shorter period (Fig. 2a, b). Because of the short duration of both UI and TBF intervals compared to the duration of a sequence, we matched the average speed calculated from the 10-s intervals with the corresponding observation time of these two proxies. When a UI or TBF observation was comprised within a 10-s speed interval (Fig. 2c, d), the proxies’ values were directly matched with the speed of that interval. If the UI or TBF interval was longer than 10 s, we calculated the average speed of the 10-s intervals which overlapped with the proxies’ observation timing for at least the 50% of their duration and excluded speed intervals included overlapping for less than the 50%.

Diagram of the criterion followed to match tracks of swimming energetic proxies with different detection timings and speed measurements from regular 10-s intervals in free ranging Southern Resident killer whales (Orcinus orca) during swimming in formation (aerial drone-based observations between June and September in 2019 and 2021). Tracked energetic proxies: breathing frequency, BF; under water intervals between consecutive emersions, UI; tail beat frequency, TBF. The BF was related to the average speed of the entire sequence (A). If an individual was visible for a shorter time than its formation neighbors (e.g., joining the group after the start of a sequence or no longer visible before the end of the sequence), a reduced sequence duration was considered (B: example of a shorter sequence for individuals only visible during a portion of it). Each UI was matched with the average speed of the corresponding 10-s intervals (C), only speed intervals which overlapped with the UI for at least 50% of their duration were taken into account to calculate the average speed. The TBF observations were matched with the speed interval within which they occurred (D left), TBF observations that occurred across multiple 10-s intervals were associated to the average speed of the 10-s interval which comprised at least the 50% of the TBF interval time
Statistical analysis
Statistical analyses were performed in R (R Core Team 2023).We aimed at estimating the effect of positioning on UI, BF, and TBF while accounting for swimming speed (in BL/s) and the physical characteristics of the whales. The analysis of both the UI and the TBF also took into account both the lateral and longitudinal distance from the nearest neighbor. All models referred to pure leaders as the baseline and took into account whale sex and the interactive effect of whale positioning and length (to test whether individuals of different sizes in the same position could have led to differences in relative energy expenditure); moreover, since the presence of multiple closely spaced whales within a group may have affected the swimming hydrodynamics of each individual, we accounted for the number of whales in the formation. The analysis took into account as random factors the sightings of each of the observed whales within each of the selected sequences. In addition, the models were performed by refining the set of included variables if some of the considered factors did not influence the main results of the analysis.
We analyzed the occurrence of a surfacing event at the end of each UI through a mixed-effects Cox model using the “coxme” R package (Therneau 2022, see Supplementary Table 2 for full mixed-effects Cox models). The BF and TBF were both initially analyzed with a generalized linear mixed-effect Poisson model, accounting for observation time by including an offset term for log(time). We first attempted to fit these models using a frequentist framework using the “lme4” R package (Bates et al. 2015). However, both models resulted in singular fits (Bates et al. 2023). In order to have more reliable inferences, we conducted the BF and TBF analyses in a Bayesian framework (McElreath 2018). Both Bayesian models were fit using the “brms” package (Burkner 2017). We set weakly informative priors using a standard normal distribution. We used four Monte Carlo Markov Chains with 10,000 iterations per chain, and model performances were evaluated using graphical posterior predictive checks, i.e. comparing the distribution of observed data with the simulated posterior predictive distributions (Gelman et al. 2013; Gabry et al. 2019). The BF was analyzed through a Poisson model by counting the number of breathing events within the observation time in minutes (offset time variable). The TBF data was found to be significantly underdispersed relative to a Poisson distribution and was therefore analyzed through a Gaussian Bayesian model weighting the observed frequency values depending on the duration of the tailbeat series (see Supplementary Tables 3 and 4 for full Bayesian models).
Both Bayesian model outputs were interpreted by non-linear hypothesis testing to optimize their evaluation (algorithm implemented in the “brms” package, Burkner 2017). Starting from the positive or negative value obtained for each fixed effect coefficient, we estimated the probability of having an effect of the same sign in model’s posterior samples (i.e., posterior probability, hereafter pp). Specifically, when the pp was confirmed in at least the 95% of the posterior samples we considered the result as strong evidence of an effect.
Results
A total of 49 sequences were analyzed in which the Southern Residents demonstrated a regular swimming pattern: 36 sequences in 2019, and 13 sequences in 2021, totaling an overall observation time of 84 min. Overall, including the entire J pod and the L54 matriline with individual L88, we could identify 27 different individuals, among which 15 were females and 12 were males (further details in Supplementary Table 5). Formations were composed of 3 to 18 individuals, with a modal size of 4. The estimated individuals size ranged between 2.00 and 6.28 m with an average whale length of 4.66 m (SEM = 0.06; Supplementary Fig. 4).
Whales breathing frequency was measured in all the 49 sequences, generating 300 individual BF scores whose duration ranged between 20 s and 5:17 min, with 2.83 breaths-per-minute on average (SEM = 0.07), and an average swimming speed between 0.02 and 1.01 BL/s (i.e., 0.07 – 3.93 m/s). In total we recorded 1429 UI within which we observed 331 positioning shifts, and whales surfaced after an average of 23.4 s (considering the total duration of all portions of an underwater interval). The tailbeat frequency was measured in 367 intervals lasting between 2.4 and 10.8 s and ranged from 0.3 to 1.28 beats-per-second (average TBF = 0.55 Hz, SEM = 0.01), with a swimming speed comprised between 0.02 and 1.32 BL/s (i.e., 0.08 – 5.51 m/s). The swimming speed values used for both BF and TBF were both within the range expected for sustainable speeds in killer whales, in line with our choice of recording killer whale swimming variables while cruising.
Underwater intervals
The analysis of UI through a mixed-effects Cox model showed that underwater intervals were significantly longer at higher speeds (β = -2.57, SE ± 0.33, Hz = 0.08, p < 0.001). The duration of the UI was also affected by the interactive effect of whale relative positioning and whale length: UI lasted longer for all trailing whales (i.e., both F and MG individuals) with a greater effect as the size of whales increased. Both pure followers and middle-group whales had a predicted lower chance of an UI ending, i.e. an estimated lower hazard ratio of ending an underwater interval by surfacing (Fig. 3). Specifically, F individuals of 2 m in length presented a predicted hazard ratio of ending an UI of 0.60 compared to leaders, and this hazard ratio decreased to 0.25 for large-sized F individuals (of 6 m in length). The predicted hazard ratio of an UI ending for MG individuals, from 2 to 6 m in length, ranged between 0.46 and 0.11 respectively.

Relative estimated chances of a killer whale ending an underwater interval (UI) by surfacing at a given time point, i.e. estimated hazard ratio of surfacing (hazard ratio UI ending), by a mixed effects Cox model formulated for free ranging Southern Resident killer whales (Orcinus orca) during swimming in formation (aerial drone-based observations between June and September in 2019 and 2021; trends obtained from the analysis of 1429 intervals between consecutive surfacing events during formation swimming). Hazard ratio (with 95% confidence interval, gray shaded areas) estimated depending on whale body length for (A) pure followers within a formation and (B) middle-group individuals, compared to pure leaders at formation head (dashed lines)
The main results of the UI model were not affected by either the lateral or longitudinal distance from the nearest neighbor and were not affected by excluding these two factors from the model’s set of variables (Supplementary Table 2).
Breathing frequency
The results of the BF Bayesian model were consistent with those of the UI model. The BF was not affected by excluding both the lateral and longitudinal distances from the nearest neighbor from the model’s factors (Supplementary Table 3). The model showed strong evidence of a decrease in the breathing rate as swimming speed increased and the effect of speed had a pp = 0.99 of being negative (β = -0.47 ± 0.20, lower 95% credible interval, CI, = -0.86, upper 95% CI = -0.08). Nevertheless, no significant effect due to the positioning or physical characteristics of the individuals was found (Fig. 4a).

Effects of different variables (reported along the y axis) on breathing frequency (A) and tail beat frequency (B) of free ranging Southern Resident killer whales (Orcinus orca) during swimming in formation (aerial drone-based observations between June and September in 2019 and 2021). Density plots obtained for each variable from Bayesian model posterior sample distributions (models performed with four Monte Carlo Markov Chains, 10,000 iterations per chain). Strong evidence of negative or positive effects (i.e., variable coefficients respectively less than or greater than zero along x axis) were taken into account when at least the 95% of the distribution was different from zero. The analyzed effects included killer whale sex and length, formation size, average swimming speed (in body-lengths-per-second) maintained during the observation, and the interactive effect of whales relative positioning within the formation and length (i.e., F: Wh. length, and MG: Wh. length). Both the breathing and the tail beat frequency were compared between leading whales within formations, pure followers (F), and whales in the middle of the group (MG). Positioning during breathing frequency observations is reported as the modal positioning maintained for most observation time (F mod, MG mod) due to possible position shift of the whales
Tailbeat frequency
The TBF model estimated a decrease in the frequency for larger individuals and for males compared to females, with a pp > 0.99 for both effects (β = -0.10 ± 0.03, l-95% CI = -0.16, u-95% CI = -0.04, for whale size effect; β = -0.08 ± 0.02, l-95% CI = -0.12, u-95% CI = -0.04, for sex effect). As expected, the TBF was found to increase with swimming speed with a pp = 0.99 for the speed effect to be positive (β = 0.15 ± 0.06, l-95% CI = 0.04, u-95% CI = 0.27). In terms of the effect of positioning, we found moderate evidence of differences in the TBF between pure followers and leading whales, even when considering the interaction effect between positioning as a follower and whale length (β = -0.03 ± 0.03, l-95% CI = -0.09, u-95% CI = 0.04, pp = 0.79). The TBF predicted from the model for F whales was similar to that of leaders regardless of their size (Fig. 5a), with an estimated pp of gaining an energetic benefit (i.e., pp of presenting a lower TBF compared to pure leaders) always < 0.8 (Fig. 5c). Nevertheless, when considering the interaction between being positioned in the middle of a group and whale length, the TBF of MG individuals was lower than that of the leaders as their size increases (β = -0.06 ± 0.03, l-95% CI = -0.12, u-95% CI = 0.00, pp = 0.97). Specifically, the predicted TBF of MG whales > 5 m in size was reduced of almost 10% compared to that of leaders, with a pp > 0.9 (Fig. 5b and d).

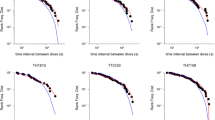
Comparison of the predicted individual tail beat frequency (TBF) and posterior probability (pp) trends of observing the predicted TBF ratio, obtained via posterior predictions from a Gaussian Bayesian model performed with four Monte Carlo Markov Chains (10,000 iterations per chain), during formation swimming of free ranging Southern Resident killer whales (Orcinus orca; aerial drone-based observations between June and September in 2019 and 2021). TBF compared between followers at the rear of formations and leaders (A), and between individuals in the middle of a group and leaders (B), in relation to whale length for both cases (TBF ratio reported in red with 95% confidence interval). The pp of observing the predicted TBF ratio depending on whale length (i.e., pp of observing a reduced TBF compared to that of formation leaders, thus of having an energetic benefit), is reported relative to both followers versus leaders (C), and middle-group individuals versus leaders (D)
The model also presented a decreasing trend for the TBF as the number of whales in formation increases, with pp = 0.94 (β = -0.01 ± 0.01, l-95% CI = -0.03, u-95% CI = 0.00; Fig. 4b). In addition, the TBF was not influenced by the lateral and longitudinal distance from the nearest neighbor (Supplementary Table 4).
Discussion
The results of this study show moderate evidence that the formation swimming of killer whales affects their energetic proxies. Breathing frequency and the duration of the underwater intervals were primarily affected by swimming speed, although the analysis of the latter suggested some positioning effect linked to body length. The tailbeat frequency was affected by both swimming speed and the physical characteristics of the whales (i.e., sex and size), but the model also presented some evidence of a formation size effect, and of a middle-group positioning for large sized individuals.
The lack of a strong difference in the overall breathing frequency (BF) of pure followers or middle-group whales compared to leaders could be due to multiple factors which may have contributed to masking any positioning-based effect. First, breathing events were opportunistically tracked over limited periods, reporting higher BF values compared to previous studies on wild killer whales (see Supplementary Fig. 5a; Kriete 1995; Williams and Noren 2009), characterized by a high variability especially in the shortest intervals (Supplementary Fig. 6a). Any effect of activity prior to our measurements may have confounded our results; in addition, whale positioning was assigned according to the position maintained for longest time during the sequence irrespective of individual intra-formation movements. Hence, these factors may have smoothed out any differences. The lack of differences in the BF in whales occupying different positions could also be due to the tendency to synchronize surfacing events as commonly documented in cetaceans (Aoki et al. 2013; Actis et al. 2018; Boileau et al. 2023). Despite some differences in the duration of the underwater intervals (i.e., the interactive effect of whale positioning and length on the UI predicted by the mixed-effects Cox model), the overall surfacing rate (described by the BF) may present phase/antiphase or more complex synchrony patterns which may mask any differences in BF. According to our Cox model results, trailing individuals show longer UI, which may be due to their positioning in the wake of leading whales. However, the overall BF may still tend to be synchronized among all group members, due to its importance in maintaining cohesion during travelling, especially in highly anthropized areas (Hastie et al. 2003).
Our results show that breathing rate (considering both the UI and BF) decreased with swimming speed, resulting in longer UI and a lower BF at higher speeds. Although this may be counter intuitive as high speeds are generally associated with higher energetic expenditures (Williams and Noren 2009), there are a few additional factors that may help explain such results. Since swimming near the surface requires a high energy expenditure compared to swimming fully submerged (Blake 1983; Fish 1994), it is possible that killer whales swim further away from the surface when travelling at high speed, though we could not measure swimming depth in our work. Roos and colleagues (2016) also found that, during high-level activity, killer whales breath most efficiently by reducing the number of surfacings, thus avoiding to incur in increased surface drag (Blake 1983). Furthermore, oxygen uptake can vary greatly between breathing events and is not constant at different speeds (Kriete 1995; Sumich 2001; Fahlman et al. 2016; Roos et al. 2016). Although over relatively long-time scales oxygen consumption must be balanced by oxygen uptake, significant deviations between oxygen consumption and field metabolic rate can occur over a relatively short time scale as in the case in our study (Goldbogen et al. 2012). Roos and colleagues (2016) showed that the best model of the relationship between oxygen consumption and speed (U3) is based on the “broken-stick O2—uptake function” in which oxygen uptake depends upon the store at the time of the respiration. Therefore, a higher oxygen extraction during high activity can, at least in part, explain why the observed breathing rate decreased with speed.
The observed frequency of tailbeats confirmed an increasing trend with speed as already documented in the literature, although our data are limited to a relatively small range of swimming speeds (with 83% of the data between 0.2 – 1 BL/s, Supplementary Fig. 7) and show lower TBF values at any given speed than previous work carried out in captivity (Supplementary Fig. 5b; Fish 1998; Rohr and Fish 2004). This may be related to a number of factors: (1) The captive killer whales observed in previous work were swimming along the curved walls of elliptical pools (Fish 1998), and therefore they may have experienced additional costs due to swimming along a curved path (Weihs 1981). (2) Our estimates of TBF from a top view in the wild may have underestimated the TBF compared to the side view measurements carried out on captive whales (Fish 1998). (3) A lower TBF as found here may suggest a lower energetic costs of swimming in formation compared to solo swimming as observed in captive whales. (4) It is possible that favorable currents may have reduced the TBF for any given speed in killer whales swimming the wild, compared to captive whales swimming in still water.
Our study found moderate evidence of the effect of positioning on the TBF when comparing leaders, followers, and middle-group whales, and only when considering the positioning factor in interaction with whale length. Although the TBF was measured through a shorter period of time than the breathing frequency and resulted in a high data variability (Supplementary Fig. 6b), tailbeat is known to be directly related to speed (Fish 1998) and it is arguably not affected by prior activities. Similarly, the potential presence of currents is unlikely to have had an effect on the relative swimming efforts of whales in different positions in the group as currents would be experienced in the same way by all the individuals in the group.
Our finding that the effect of position on energetic proxies represented only a moderate trend (and only in some of the proxies when considering multiple factors at play) may be related to a number of explanations. The killer whales we observed are unlikely to swim in the vorticity wake of their formation neighbors due to their swimming dynamics. Unlike in fish, in whales the reverse Kármán vortices are released dorsally and ventrally to the body (Fish 1999). Thus, to benefit from their neighbors’ vortices, killer whales should ideally be arranged along a vertical plane in the water column, rather than horizontally (as in most species of fish, Herskin and Steffensen 1998; Burgerhout et al. 2013), which would make it difficult to surface and was not observed here. Alternatively, for drafting (Weihs 2004; Noren and Edwards 2011), individuals need to swim at a relatively short distance from each other, which occurred rarely in our observations (91% of the observations with a lateral distance of more than 2 m; Supplementary Fig. 8). Adult feeding bowhead whales (Balaena mysticetus) were observed in the wild while being rolled on their flank at an interindividual distance much shorter than that observed here, i.e. 0.98 m, less than one body width apart, which was suggested to decrease the cost of locomotion and increase feeding efficiency (Fish et al. 2013). Our results do not exclude that, in certain configurations (e.g., mother-calf pairs, Noren et al. 2008), killer whale calves may derive considerable energetic advantages by swimming near their neighbors. This may be a specific phenomenon restricted to mother-calf interactions, which was not commonly observed in our videos. Moreover, given that calves tailbeat measurements were only possible when they were not in echelon position, it is possible that the TBF observed in those cases was higher than expected due to their effort to recover the potentially more advantageous positioning alongside their mothers. Nevertheless, the Bayesian model shows a trend for reduced TBF in whales swimming in larger formations. An effect of group size was found in cyclists who reduced their energetic expenditure when travelling behind larger groups (Hagberg and McCole 1990). A similar effect of group size may apply to leaders. Work on fish (Marras et al. 2015) and underwater hulls (Rattanasiri et al. 2012) suggests that individuals travelling ahead of their neighbors may experience a moderate reduction in drag due to the pressures exerted by the followers. Thus, at least potentially, a group that includes a larger number of followers may cause a larger drag reduction in their leaders.
Given that energetic benefits during formation swimming for killer whales could be observed only when considering multiple factors at play (i.e., whales relative position depending on their length, or the presence of multiple closely spaced individuals in formation), energetic saving may not be the main driver of swimming in the wake of conspecifics. Kin relationship is likely to be one of the factors playing a key role in determining the positions and spacing between whales (e.g., calf near mother, sisters next to each other). Given the tight population structures typical of odontocetes species (Gowans et al. 2008; Smith et al. 2020; Weiss et al. 2021a), kinship ties are likely crucial in dictating whale positioning within the formation (Parsons et al. 2003; Colbeck et al. 2013). Maintaining spatial proximity between individuals with strong social ties may optimize communication among formation members and the processing of the stimuli network (i.e., coordination between stimuli from the external environment and from formation neighbors; Karenina et al. 2010; Strandburg-Peshkin et al. 2013; Poupard et al. 2021). Formation positioning could also be dictated by intra-population hierarchies and whales could arrange themselves closer to specific individuals with leading roles (i.e., matriarchs). This arrangement could be fundamental to make oriented moves (Strandburg-Peshkin et al. 2018), such as towards food-rich areas (Foster et al. 2012; Brent et al. 2015). The hierarchical arrangement of a formation could also be crucial for SRKW calves or physically weaker individuals of the population to be able to travel in the Salish Sea area while avoiding anthropic threats (Sobocinski 2021).
Hence, given the moderate evidence of energy saving during formation swimming for the SRKW in some specific conditions and considering the multiple non-energetic drivers potentially at play (e.g., the possibility that the spacing pattern is mainly dictated by kinships and social bonds), it will be crucial to investigate in detail the multiple determinants of killer whale formation swimming to better understand the adaptive significance of this behavior, which may lead to the development of management measures that permit its full expression in highly anthropized areas.
Data availability
The data to reproduce the key results of this study are available in the open repository https://doi.org/10.5281/zenodo.10218080
References
Acevedo-Gutierrez A (2009) Group behavior. In: Perrin WF, Würsig B, Thewissen JGM (eds) Encyclopedia of Marine Mammals, 2nd edn. Elsevier Academic Press, San Diego, pp 511–520
Actis PS, Danilewicz D, Cremer MJ, Bortolotto GA (2018) Breathing synchrony in Franciscana (Pontoporia blainvillei) and Guiana dolphins (Sotalia guianensis) in Southern Brazil. Mar Mammal Sci 34:777–789. https://doi.org/10.1111/mms.12480
Aoki K, Sakai M, Miller PJO, Visser F, Sato K (2013) Body contact and synchronous diving in long-finned pilot whales. Behav Process 99:12–20. https://doi.org/10.1016/j.beproc.2013.06.002
Aoki K, Amano M, Sugiyama N, Muramoto H, Suzuki M, Yoshioka M, Mori M, Tokuda D, Miyazaki N (2007) Measurement of swimming speed in sperm whales. In: Proceedings of the international symposium on underwater technology 2007 and international workshop on scientific use of submarine cables and related technologies (UT07_SSC07). IEEE, Tokyo, pp 467–471. https://doi.org/10.1109/UT.2007.370754
Ashton BJ, Thornton A, Ridley AR (2019) Larger group sizes facilitate the emergence and spread of innovations in a group-living bird. Anim Behav 158:1–7. https://doi.org/10.1016/j.anbehav.2019.10.004
Bates D, Machler M, Bolker BM, Walker SC (2015) Fitting linear mixed-effects models using lme4. J Stat Softw 67:1–48. https://doi.org/10.18637/jss.v067.i01
Bates D, Maechler M, Bolker BM, Walker SC, Singmann H, Dai B, Green P, Fox J, Bauer A, Krivitsky PN (2023) Linear Mixed-Effects Models using “Eigen” and S4, https://github.com/lme4/lme4/
Bill RG, Herrnkind WF (1976) Drag reduction by formation movement in spiny lobsters. Science 193:1146–1148. https://doi.org/10.1126/science.193.4258.1146
Blake RW (1983) Energetics of leaping in dolphins and other aquatic animals. J Mar Biol Assoc UK 63:61–70. https://doi.org/10.1017/s0025315400049808
Boileau A, Blais J, Mercier L, Desmarchelier M, Ahloy-Dallaire J (2023) Synchronous swimming and diving behaviour in a group of fin whales (Balaenoptera physalus). Aquat Mamm 49:87–93. https://doi.org/10.1578/am.49.1.2023.87
Brent LJN, Franks DW, Foster EA, Balcomb KC, Cant MA, Croft DP (2015) Ecological knowledge, leadership, and the evolution of menopause in killer whales. Curr Biol 25:746–750. https://doi.org/10.1016/j.cub.2015.01.037
Burgerhout E, Tudorache C, Brittijn SA, Palstra AP, Dirks RP, van den Thillart G (2013) Schooling reduces energy consumption in swimming male European eels, Anguilla anguilla L. J Exp Mar Biol Ecol 448:66–71. https://doi.org/10.1016/j.jembe.2013.05.015
Burkner PC (2017) brms: an R package for Bayesian multilevel models using Stan. J Stat Softw 80:1–28. https://doi.org/10.18637/jss.v080.i01
Center for Whale Research (2023) Center for Whale Research. Southern Resident Killer Whale population, https://www.whaleresearch.com/
Charmant J (2004) Kinovea, https://kinovea.org/
Chung TYT, Ho HHN, Tsui HCL, Kot BCW (2022) First unmanned aerial vehicle observation of epimeletic behavior in Indo-Pacific Humpback Dolphins. Animals 12:1463. https://doi.org/10.3390/ani12111463
Colbeck GJ, Duchesne P, Postma LD, Lesage V, Hammill MO, Turgeon J (2013) Groups of related belugas (Delphinapterus leucas) travel together during their seasonal migrations in and around Hudson Bay. Proc R Soc B 280:20122552. https://doi.org/10.1098/rspb.2012.2552
Dans SL, Luzenti EA, Coscarella MA, Joo R, Degrati M, Curcio NS (2022) Seasonal variation and group size affect movement patterns of two pelagic dolphin species (Lagenorhynchus obscurus and Delphinus delphis). PLoS ONE 17:e0276623. https://doi.org/10.1371/journal.pone.0276623
Durban J, Deecke V (2011) How do we study killer whales. J Am Cetacean Soc 40:6–14
Fahlman A, van der Hoop J, Moore MJ, Levine G, Rocho-Levine J, Brodsky M (2016) Estimating energetics in cetaceans from respiratory frequency: why we need to understand physiology. Biol Open 5:436–442. https://doi.org/10.1242/bio.017251
Fiori L, Doshi A, Martinez E, Orams MB, Bollard-Breen B (2017) The use of unmanned aerial systems in marine mammal research. Remote Sens 9:543. https://doi.org/10.3390/rs9060543
Fish FE (1994) Influence of hydrodynamic-design and propulsive mode on mammalian swimming energetics. Aust J Zool 42:79–101. https://doi.org/10.1071/zo9940079
Fish FE (1995) Kinematics of ducklings swimming in formation - consequences of position. J Exp Zool 273:1–11. https://doi.org/10.1002/jez.1402730102
Fish FE (1998) Comparative kinematics and hydrodynamics of odontocete cetaceans: Morphological and ecological correlates with swimming performance. J Exp Biol 201:2867–2877
Fish FE (1999) Energetics of swimming and flying in formation. Comments Theor Biol 5:283–304
Fish FE, Goetz KT, Rugh DJ, Brattstroem LV (2013) Hydrodynamic patterns associated with echelon formation swimming by feeding bowhead whales (Balaena mysticetus). Mar Mammal Sci 29:E498–E507. https://doi.org/10.1111/mms.12004
Fish FE, Rohr J (1999) Review of dolphin hydrodynamics and swimming performance. SSC Technical Report 1801. SPAWARS System Center, San Diego, CA
Foster EA, Franks DW, Mazzi S, Darden SK, Balcomb KC, Ford JKB, Croft DP (2012) Adaptive prolonged postreproductive life span in killer whales. Science 337:1313–1313. https://doi.org/10.1126/science.1224198
Gabry J, Simpson D, Vehtari A, Betancourt M, Gelman A (2019) Visualization in Bayesian workflow. J R Stat Soc A Stat 182:389–402. https://doi.org/10.1111/rssa.12378
Gelman A, Carlin JB, Stern HS, Dunson DB, Vehtari A, Rubin DB (2013) Bayesian Data Analysis, 3rd edn. CRC Press, Boca Raton
Goldbogen JA, Calambokidis J, Croll DA, McKenna MF, Oleson E, Potvin J, Pyenson ND, Schorr G, Shadwick RE, Tershy BR (2012) Scaling of lunge-feeding performance in rorqual whales: mass-specific energy expenditure increases with body size and progressively limits diving capacity. Funct Ecol 26:216–226. https://doi.org/10.1111/j.1365-2435.2011.01905.x
Gowans S, Würsig B, Karczmarski L (2008) The social structure and strategies of delphinids: Predictions based on an ecological framework. In: Sims DW (ed) Advances in Marine Biology. Academic Press, London, pp 195–294
Guinet C, Domenici P, de Stephanis R, Barrett-Lennard L, Ford JKB, Verbough P (2007) Killer whale predation on bluefin tuna: exploring the hypothesis of the endurance-exhaustion technique. Mar Ecol Prog Ser 347:111–119. https://doi.org/10.3354/meps07035
Hagberg JM, McCole SD (1990) The effect of drafting and aerodynamic equipment on the energy expenditure during cycling. Cycl Sci 2:19–22
Hartman K, van der Harst P, Vilela R (2020) Continuous focal group follows operated by a drone enable analysis of the relation between sociality and position in a group of male Risso’s dolphins (Grampus griseus). Front Mar Sci 7:283. https://doi.org/10.3389/fmars.2020.00283
Hastie GD, Wilson B, Tufft LH, Thompson PM (2003) Bottlenose dolphins increase breathing synchrony in response to boat traffic. Mar Mammal Sci 19:74–84. https://doi.org/10.1111/j.1748-7692.2003.tb01093.x
Herskin J, Steffensen JF (1998) Energy savings in sea bass swimming in a school: measurements of tail beat frequency and oxygen consumption at different swimming speeds. J Fish Biol 53:366–376. https://doi.org/10.1006/jfbi.1998.0708
Karenina K, Giljov A, Baranov V, Osipova L, Krasnova V, Malashichev Y (2010) Visual laterality of calf-mother interactions in wild whales. PLoS ONE 5:e13787. https://doi.org/10.1371/journal.pone.0013787
Krahn MM, Ford MJ, Perrin WF et al (2004) 2004 Status review of Southern resident killer whales (Orcinus orca) under the Endangered Species Act. NOAA Technical Memorandum NMFS-NWFSC-54. U.S. Department of Commerce, Springfield, VA, https://repository.library.noaa.gov/view/noaa/17424
Krause J, Ruxton G (2002) Living in Groups, 1st edn. Oxford University Press, Oxford
Kriete B (1995) Bioenergetics in the killer whale, Orcinus orca. PhD thesis, Department of Animal Science, University of British Columbia. https://doi.org/10.14288/1.0088104
Li L, Nagy M, Graving JM, Bak-Coleman J, Xie GM, Couzin ID (2020) Vortex phase matching as a strategy for schooling in robots and in fish. Nat Commun 11:5408. https://doi.org/10.1038/s41467-020-19086-0
Liao JC (2022) Fish swimming efficiency. Curr Biol 32:R666–R671. https://doi.org/10.1016/j.cub.2022.04.073
Marras S, Killen SS, Lindström J, McKenzie DJ, Steffensen JF, Domenici P (2015) Fish swimming in schools save energy regardless of their spatial position. Behav Ecol Sociobiol 69:219–226. https://doi.org/10.1007/s00265-014-1834-4
McElreath R (2018) Statistical rethinking: a bayesian course with examples in R and stan, 2nd edn. CRC Press, Boca Raton
National Marine Fisheries Service (2021) Southern Resident killer whales (Orcinus orca) 5-year Review: summary and evaluation. National Marine Fisheries Service West Coast Region, Seattle, WA. https://www.fisheries.noaa.gov/s3//2022-01/srkw-5-year-review-2021.pdf
Noren SR, Edwards EF (2011) Infant position in mother-calf dolphin pairs: formation locomotion with hydrodynamic benefits. Mar Ecol Prog Ser 424:229–236. https://doi.org/10.3354/meps08986
Noren SR, Biedenbach G, Redfern JV, Edwards EF (2008) Hitching a ride: the formation locomotion strategy of dolphin calves. Funct Ecol 22:278–283. https://doi.org/10.1111/j.1365-2435.2007.01353.x
Norris KS, Johnson CM (1994) Schools and schooling. In: Norris KS, Würsig B, Wells RS, Würsig M (eds) The Hawaiian spinner dolphin. University of California Press, Berkeley, pp 232–242
Parsons KM, Durban JW, Claridge DE, Balcomb KC, Noble LR, Thompson PM (2003) Kinship as a basis for alliance formation between male bottlenose dolphins, Tursiops truncatus, in the Bahamas. Anim Behav 66:185–194. https://doi.org/10.1006/anbe.2003.2186
Parsons KM, Balcomb KC, Ford JKB, Durban JW (2009) The social dynamics of southern resident killer whales and conservation implications for this endangered population. Anim Behav 77:963–971. https://doi.org/10.1016/j.anbehav.2009.01.018
Portugal SJ, Hubel TY, Fritz J, Heese S, Trobe D, Voelkl B, Hailes S, Wilson AM, Usherwood JR (2014) Upwash exploitation and downwash avoidance by flap phasing in ibis formation flight. Nature 505:399–402. https://doi.org/10.1038/nature12939
Poupard M, Symonds H, Spong P, Glotin H (2021) Intra-group orca call rate modulation estimation using compact four hydrophones array. Front Mar Sci 8:15. https://doi.org/10.3389/fmars.2021.681036
R Core Team (2023) R: A language and environment for statistical computing. R Foundation for Statistical Computing, Vienna, Austria, http://www.R-project.org
Rattanasiri P, Wilson PA, Phillips AB (2012) Numerical investigation of the drag of twin prolate spheroid hulls in various longitudinal and transverse configurations. In: Proceedings of 2012 IEEE/OES AUV, Southampton, GB, 24–27 September, pp 1–7. https://doi.org/10.1109/AUV.2012.6380731
Fisheries and Oceans Canada (2021) Southern Resident killer whale accountability framework: evaluating support for recovery, 17, https://waves-vagues.dfo-mpo.gc.ca/library-bibliotheque/40970188.pdf
Riesch R, Ford JKB, Thomsen F (2006) Stability and group specificity of stereotyped whistles in resident killer whales, Orcinus orca, off British Columbia. Anim Behav 71:79–91. https://doi.org/10.1016/j.anbehav.2005.03.026
Rohr JJ, Fish FE (2004) Strouhal numbers and optimization of swimming by odontocete cetaceans. J Exp Biol 207:1633–1642. https://doi.org/10.1242/jeb.00948
Roos MMH, Wu GM, Miller PJO (2016) The significance of respiration timing in the energetics estimates of free-ranging killer whales (Orcinus orca). J Exp Biol 219:2066–2077. https://doi.org/10.1242/jeb.137513
Saadat M, Berlinger F, Sheshmani A, Nagpal R, Lauder GV, Haj-Hariri H (2021) Hydrodynamic advantages of in-line schooling. Bioinspir Biomim 16:046002. https://doi.org/10.1088/1748-3190/abe137
Santos MCD, Lailson-Brito J, Flach L, Oshima JEF, Figueiredo GC, Carvalho RR, Ventura ES, Molina JMB, Azevedo AF (2019) Cetacean movements in coastal waters of the southwestern Atlantic Ocean. Biota Neotrop 19:11. https://doi.org/10.1590/1676-0611-bn-2018-0670
Segre PS, Cade DE, Calambokidis J, Fish FE, Friedlaender AS, Potvin J, Goldbogen JA (2019) Body flexibility enhances maneuverability in the world’s largest predator. Integr Comp Biol 59:48–60. https://doi.org/10.1093/icb/icy121
Shoele K, Zhu Q (2016) Drafting mechanisms between a dolphin mother and calf. J Theor Biol 389:310. https://doi.org/10.1016/j.jtbi.2015.11.003
Simard P, Gowans S (2008) Group movements of white-beaked dolphins (Lagenorhynchus albirostris) near Halifax, Canada. Aquat Mamm 34:331–337. https://doi.org/10.1578/AM.34.3.2008.331
Simons AM (2004) Many wrongs: the advantage of group navigation. Trends Ecol Evol 19:453–455. https://doi.org/10.1016/j.tree.2004.07.001
Smith JE, Ortiz CA, Buhbe MT, van Vugt M (2020) Obstacles and opportunities for female leadership in mammalian societies: a comparative perspective. Leadership Quart 31:101267. https://doi.org/10.1016/j.leaqua.2018.09.005
Sobocinski KL (2021) State of the Salish Sea. Western Washington University, Bellingham, WA, Salish Sea Institute
Strandburg-Peshkin A, Twomey CR, Bode NWF et al (2013) Visual sensory networks and effective information transfer in animal groups. Curr Biol 23:R709–R711. https://doi.org/10.1016/j.cub.2013.07.059
Strandburg-Peshkin A, Papageorgiou D, Crofoot MC, Farine DR (2018) Inferring influence and leadership in moving animal groups. Phil Trans R Soc B 373:20170006. https://doi.org/10.1098/rstb.2017.0006
Sumich J (2001) Direct and indirect measures of oxygen extraction, tidal lung volumes, and respiratory rates in a rehabilitating gray whale calf. Aquat Mamm 27:279–283
Therneau TM (2022) coxme: Mixed Effects Cox Models, https://CRAN.R-project.org/package=coxme
Watanabe YK, Goldbogen JA (2021) Too big to study? The biologging approach to understanding the behavioural energetics of ocean giants. J Exp Biol 224:202747. https://doi.org/10.1242/jeb.202747
Webb PW, Kostecki PT, Stevens ED (1984) The effect of size and swimming speed on locomotor kinematics of rainbow-trout. J Exp Biol 109:77–95
Weihs D (1981) Effects of swimming path curvature on the energetics of fish motion. Fish Bull 79:171–176
Weihs D (2002) Dynamics of dolphin porpoising revisited. Integr Comp Biol 42:1071–1078. https://doi.org/10.1093/icb/42.5.1071
Weihs D (2004) The hydrodynamics of dolphin drafting. J Biol 3:8
Weimerskirch H, Martin J, Clerquin Y, Alexandre P, Jiraskova S (2001) Energy saving in flight formation. Nature 413:697–698. https://doi.org/10.1038/35099670
Weiss MN, Ellis S, Croft DP (2021a) Diversity and consequences of social network structure in toothed whales. Front Mar Sci 8:15. https://doi.org/10.3389/fmars.2021.688842
Weiss MN, Franks DW, Giles DA et al (2021b) Age and sex influence social interactions, but not associations, within a killer whale pod. Proc R Soc B 288:20210617. https://doi.org/10.1098/rspb.2021.0617
Williams R, Noren DP (2009) Swimming speed, respiration rate, and estimated cost of transport in adult killer whales. Mar Mammal Sci 25:327–350. https://doi.org/10.1111/j.1748-7692.2008.00255.x
Williams TM, Friedl WA, Fong ML, Yamada RM, Sedivy P, Haun JE (1992) Travel at low energetic cost by swimming and wave-riding bottle-nosed dolphins. Nature 355:821–823. https://doi.org/10.1038/355821a0
Würsig B (2009) Bow-riding. In: Perrin WF, Würsig B, Thewissen JGM (eds) Encyclopedia of Marine Mammals, 2nd edn. Elsevier Academic Press, San Diego, pp 133–134
Acknowledgements
We thank our colleagues for their important roles in the collection of social and demographic data on the Southern Resident Killer Whale population over the last four decades, particularly Kenneth Balcomb, Dave Ellifrit, and Astrid van Ginneken. We thank the anonymous reviewers for improving the earlier version of this manuscript.
Funding
Open access funding provided by Università di Pisa within the CRUI-CARE Agreement. This research is supported by the Italian Ministry of University and Research (MUR) as part of the PON 2014–2020 “Research and Innovation” resources – Green/Innovation Action – DM MUR 1061/2022. The data collection of this study has been supported by the Natural Environment Research Council (grant NE/S010327/1).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Ethics approval
Data were collected by the Center for Whale Research under federal permit provided by US National Marine Fisheries Service (permit number 21238). The data collection was approved by the University of Exeter ethics committee, and all work was conducted following all applicable international, national, and institutional guidelines for the study of animals.
Conflict of interest
The authors declare no competing interests.
Additional information
Communicated by I. Charrier.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Spina, F., Weiss, M.N., Croft, D.P. et al. The effect of formation swimming on tailbeat and breathing frequencies in killer whales. Behav Ecol Sociobiol 78, 75 (2024). https://doi.org/10.1007/s00265-024-03492-1
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00265-024-03492-1