
Abstract
Observing and understanding the motion of an intruder through opaque dense suspensions such as quicksand remains a practical and conceptual challenge. Here we use an ultrasonic probe to monitor the sinking dynamics of a steel ball in a dense glass bead packing (3D) saturated by water. We show that the frictional model developed for dry granular media can be used to describe the ball motion induced by horizontal vibration. From this rheology, we infer the static friction coefficient and effective viscosity that decrease when increasing the vibration intensity. Our main finding is that the vibration-induced reduction of the yield stress and increase of the sinking depth are presumably due to micro-slips induced at the grain contacts but without visible plastic deformation due to macroscopic rearrangements, in contrast to dry granular packings. To explain these results, we propose a mechanism of acoustic lubrication that reduces the inter-particle friction and leads to a decrease of the yield stress. This scenario is different from the mechanism of liquefaction usually invoked in loosely packed quicksands where the vibration-induced compaction increases the pore pressure and decreases the confining pressure on the solid skeleton, thus reducing the granular resistance to external load.
Similar content being viewed by others


Introduction
A ball dropped in a Newtonian fluid of smaller density starts to accelerate due to gravity before achieving a terminal velocity, which for low Reynolds numbers is inversely proportional to the viscosity according to Stokes’ law. This experiment is the basis of a classical method for measuring the viscosity of a Newtonian fluid. However, in foams, emulsions or fluid-particle suspensions, the ball may stop sinking at a given depth due to the yield stress (jammed state), which depends on the packing density, confining pressure and shear stress applied by the intruder1,2,3,4,5,6,7. Dense suspensions of non-colloidal particles occur in many industrial applications and geological processes such as mudflows and underwater avalanches3,4. Their flow dynamics is very rich and depends to a large extent on the density mismatch between the suspending liquid and the solid particles8. Density matched, or neutrally-buoyant suspensions, behave basically as non-Newtonian liquids without yield stress (except in the presence of the confining pressure between grains in contact9), while non-density-matched suspensions subject to gravity show roughly two flow regimes8 similar to that of dry granular media10,11: a slow creeping flow in which the contacts between the particles are essentially frictional, and a fast inertial flow where the particles lose enduring contact and exhibit a Bagnold rheology due to particle inertia and brief collisional contact.
More precisely, in a dry granular packing, the flow dynamics has been described by a modified frictional rheology µ(I) = τ/P with τ the shear stress and P the confining pressure. I is the inertial number, i.e. the ratio between the characteristic time of grain rearrangement controlled by confining pressure and the macroscopic time determined by shear rate11. Such a concept was recently applied to dense granular suspensions in which the inertial relaxation time is rather governed by viscous drag forces at small Stokes number12,13. By using a viscous number Iv, a similar constitutive friction law as used in dry granular media has been proposed8,9,13. Aside from solid-like friction, there is another important characteristic that sets granular flows apart from classical Newtonian flows, namely non-locality14,15 where the rheological response depends on the sample size; rheological studies performed in split-bottom and Couette cells provided evidence that flow in any part of a granular system leads to yielding throughout the entire system16,17. Similarly, studies in dry granular media18,19,20,21,22,23,24,25 and gravitational granular suspensions26,27 show that vibrations can also reduce the yield stress or/and modify the effective viscosity of flow.
However, in the case of natural phenomena such as liquefaction of quicksand28,29, several important questions still remain. Are there other mechanisms of liquefaction than vibration-induced compaction4,28, given that a heavy intruder can also sink in sheared dry granular packings16? Can the frictional rheology describe the motion of an intruder in vibrated dense granular media without macroscopic plastic rearrangement of grains (positions)30,31? The motion of an intruder inside dense granular media is mostly studied in 2D packings32 and investigations within 3D granular media (optically opaque) still pose challenging problems. Here we report on a new experimental approach to investigate the sinking dynamics of a steel ball in dense granular suspensions, i.e. glass bead packings saturated by water (i.e. non-density-matched “suspensions”). We show that applied horizontal vibrations induce visible plastic rearrangements of grains in dry granular packings, but not in dense granular suspensions. Then, using a remote ultrasonic probing, we precisely determine the ball position during its descent in the vibrated opaque granular suspension. We analyse these results within the framework of previous granular rheological models8,9,11,12,13 and we show that the transition from the solid state to the liquid state is intimately connected to the weakening of the shear resistance of contact via micro-slips between grains30,33,34,35, involving plastic deformations on the micro/nanometric scale33.
Results
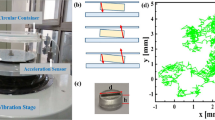
Optical observation of the fine details of flow inside a 3D granular suspension is difficult due to light scattering by grains. One possibility to overcome this difficulty is to match the refractive index of the particles to that of the constituent fluid, but this technique is not applicable to most real opaque systems. In this work, we investigate the sinking of an intruder by tracking its position via its ultrasonic echoes36 as shown in Fig. 1 (see Methods for details). Our set-up consists of a plexiglass container with diameter Dc ≈ 150 mm filled with glass beads of diameter d ~ 100 µm saturated by water up to H ≈ 180 mm. It is supported on a bearing (a rolling bead G) and coupled horizontally to a shaker, which applies a horizontal vibration at a frequency in the range of 50–300 Hz first for the sample preparation and then for the sinking experiment. The acceleration of vibration a, measured by the accelerometer A, ranges from Γ = a/g = 0.27–2.7 with g = 9.8 m2/s. The horizontal vibration combined with gravitational sedimentation results in a dense granular suspension with initial packing density of about 62%. Interestingly, at this stage there is no visible rearrangement of glass beads under vibration in contrast to the case of dry packings (see Movies 1 and 2 in Supplementary information) where the grains in the top layers flow or slide against each other whenever Γ > µ (i.e., Fa/W > µ with Fa = ma, W = mg) with µ the effective friction coefficient20,21. The intruder is chosen from a set of steel balls of respective radii R = 4, 5, and 7 mm, carefully placed on the surface of this jammed granular packing. The ball begins to sink as soon as the horizontal vibration is applied to the container.

(a) Schematic diagram of the experimental set-up. (b) Ultrasound echoes from the water-suspension interface and from the ball, respectively. (c) Stack of waveforms showing the position of the intruder and the position of the water-suspension interface during a ball sinking experiment.
To characterize in detail the sinking of the intruder in the dense granular suspension, we first examine how the position z(t) (Fig. 1a) depends on the vibration acceleration Γ and on the intruder size 2 R. Figure 2a shows that the motion z(t) of the intruder of radius R = 5 mm is smooth when Γ varies from 0.27 to 2.7. We then calculated, for each Γ, the instantaneous sinking velocity dz/dt and the acceleration d2z/dt2 by numerical differentiation. More specifically, dz/dt was obtained via [z(t + Δt) − z(t)]/Δt, where the time interval Δt was set to 20 seconds in order to reduce the noise, but short enough compared to the sinking duration. The acceleration d2z/dt2 was calculated similarly. Figure 2b,c depict the instantaneous velocity and acceleration of the ball as a function of the sinking position z, which shows a fast deceleration at short times and a slow sinking at long times.

Sinking dynamics of a steel ball of radius R = 5 mm for different vibration intensities Γ. (a) Positions of the ball versus time. (b) Instantaneous sinking velocities versus ball positions. Inset: comparison with the full analytical solution (black line) for Γ = 1.08 (see Eqs 7 and 8 in Methods). (c) Accelerations versus ball positions. (d) Sinking acceleration versus velocity, which shows a transition from a fast decelerating regime to a quasi-steady regime. (dz/dt)* is obtained from the intersection of two sets of linear fits (see dotted lines). (e) The ball positions versus time in the quasi-steady regime. The black lines correspond to the solutions fitted in the quasi-steady regime with Eq. 4. (f) Evolution of the ball position at the lowest acceleration of vibration for various radii.
Figure 2d represents the acceleration as a function of the sinking velocity and reveals a clear kink separating the fast decelerating and the quasi-steady flow regimes. The velocity at this kink (dz/dt)* is determined from the intersection of linear fits to the two regimes and we define z* and t* as the depth and time at which (dz/dt)* is reached. The depth z*, slightly depending on Γ, is roughly equal to the diameter of the sinking ball; this suggests that the rapid decelerating regime occurs during the partial submergence of the intruder and is dominated by complex effects such as crater formation on the surface just above the intruder. In the following, we focus on the quasi-steady flow regime that is represented by the plots in Fig. 2e.
For the lowest vibration Γ, it is found that the intruder decelerates until approaching a final depth at which it is partly submerged (Fig. 2a). We observe similar behaviour for the smaller (Fig. 3a1) and larger intruders (Fig. 3a2), respectively. As shown by zoomed traces in Fig. 2f, the small ball of radius R = 4 mm almost reaches the depth of arrest in the experimental time range and exhibits a fluctuating motion around it. Here the resolution for probing the relative displacement is Δz = (1/2) cw ΔT0 ~ 4 μm provided by the sampling rate 1/ΔT0 ~ 200 MHz. This fluctuation is reminiscent of the creep-like motion of a partially submerged intruder in a sheared dry granular medium16. For increasing values of Γ, the intruder asymptotically reaches larger depths (Fig. 2a) but does not completely stop at the range of our observation. We study the influence of the intruder size by performing the same experiments with the steel ball of different radius R = 4 mm and 7 mm (Fig. 3). The behaviour of sinking is similar for all different intruders with a fast decelerating and a quasi-steady flow regimes: the larger the intruder the larger the sinking depth.

Sinking dynamics for different intruder-sizes and for different vibration intensities Γ. (a1) Depth versus time for an intruder with R = 4 mm and (a2) for an intruder with R = 7 mm. (b1) Instantaneous velocity versus sinking depth obtained from (a1) and (b2) from (a2). The black lines correspond to the solutions fitted in the quasi-steady regime with Eq. 4.
Finally, we have tested whether or not the steel ball with R = 5 mm will sink in a dry granular packing of glass beads (d ~ 100 µm) under the same vibration conditions. First, we do observe that the intruder starts sinking when the external vibration is applied; moreover, it reaches the final depth more slowly than in the water-saturated granular packing (see Movie 2 in Supplementary information). Second, we observe visible macroscopic rearrangements (i.e. jiggling of grains) at the surface of the dry granular packing in contrast to the vibrated dense granular suspension.
Discussion
The intruder sinking along the gravity direction can be analysed from the equation of motion with the forces acting on the intruder (Fig. 4a), namely the weight, the buoyant force and the frictional force (Fs) due to the gravitational suspension:
with m = (4/3)πR3ρs and Δρ1 = ρs − ρsus. Here ρs ~ 8000 kg/m3 is the mass density of the steel ball and ρsus (=0.62ρp + 0.38ρf) ~ 1930 kg/m3 is the density of the granular suspension (mass densities of a glass bead and water are respectively ρp = 2500 kg/m3 and ρf = 1000 kg/m3). To specify the frictional force Fs, we need to know the frictional rheology defining the gravitational granular suspension. Courrech du Pont et al.12 and Cassar et al.13 have previously shown that the constitutive law of dense granular suspensions can be inferred from the relevant time scales controlling grain motion. In particular, one can evaluate the Stokes number St = tav/tff ~ 0.3 for a confining pressure Pg = Δρ2 g z due to gravity (with Δρ2 = ρp − ρf and z ~ 10 mm the depth). Here tav = (2/3)ρpαd2/ηf is the characteristic acceleration time for a grain to reach a limit velocity v∞ = Pgαd/ηf due to the viscous force and tff = d(2ρp/(3Pg)1/2 is the time of free fall for a grain over a distance equal to one diameter d without interstitial liquid (i.e., in a dry granular packing). ηf/α is the effective viscosity of the granular suspension with ηf ~ 10−3 Pa.s the viscosity of water and α ~ 0.01 a permeability parameter13. Besides, the particulate Reynolds number may be estimated by6 Rep = ρpvpd/(ηf/α) ~ 10−4 with the flow velocity vp close to the sinking velocity of the intruder dz/dt ~ 10−4 m/s (see discussion below). The small values of St < 1 and Rep « 1 indicate that the interstitial fluid change the time scale of the microscopic rearrangements: the viscous forces dominate at the grain scale. A heuristic rheological law can then be written in terms of the dimensionless number Iv8,12,13:
with τ the shear stress, Pg the confining pressure, dγ/dt the strain rate, µ0 and µ1 the static and dynamic (viscous) friction coefficients. The viscous number Iv = tfall (dγ/dt) is interpreted as the ratio between the time of grain rearrangement ttall = d/v∞ = (ηf/Pgα) and the characteristic time (dγ/dt)−1 imposed by the shear. Equation 2 shows that for low shear rate, the local shear stress in a gravitational suspension is a combination of a (frictional) yield stress and a viscous stress, similar to the case of a Bingham plastic fluid with a yield stress τ0 = µ0Pg and a viscosity ηB = µ1ηf/α3,6,7.

(a) Sketch of a ball sinking in a dense granular suspension. (b) Static friction coefficient µ0 and (c) effective viscosity ηeff versus vibration intensity, determined from the fit of traces z(t) in Figs 2a and 3a1,a2 by Eq. 4. Data are obtained with the different intruder size R = 4 mm (circles), 5 mm (triangles) and 7 mm (squares). The dotted line in (b) corresponds to a heuristic friction model (see text).
There are few if any analytical solutions for a solid ball falling (or settling) through non-Newtonian suspensions. The flow field around the ball may differ appreciably from Stokes’ solution in a Newtonian fluid due to the yield stress ref.7. Nevertheless, it was shown that for a ball sinking in Bingham plastic fluids at small Reynolds number, ReB = ρsus(dz/dt)2/[τ0 + ηB(dz/dt)/2 R] with γ = (dz/dt)/2 R, the dependence of the drag coefficient Cd = f(ReB) can be tracked back to that of Newtonian fluids, i.e. Cd ~ 24/ReB6. Here it must be emphasized that the calculation of the Reynolds number includes the yield stress. Following the work of Dedegil6, we consider the frictional force Fs (Eq. 1) as the sum of two contributions, Fs = F0 + Fd, with one threshold force F0 = (πR)2(µ0Δρ2gz) independent of the Reynolds number ReB (<0.1) and one drag force Fd = Cd πR2ρsus(dz/dt)2/2. The existence of a yield stress τ0 = µ0Δρ2gz leads to the fact that the intruder below a certain depth does not sink (or settle) at all but remains suspended. This is the case when the forces due to weight, buoyancy and threshold are balanced (dz/dt = 0) in Eq. 1, from which the depth of penetration is deduced to z∞ = (4/π)Δρ1 R/(3µ0 Δρ2) at a given µ0. This indicates that the larger the intruder R or/and the lower the static friction coefficient the larger the penetration depth, as is illustrated by the asymptote of traces z(t) in Figs 2a and 3a1,a2.
To interpret qualitatively the sinking dynamics, we use the above approximate expression for the drag coefficient in the laminar regime which leads to a Stokes-like viscous force Fd = 6πRηeff (dz/dt) with an effective viscosity ηeff = τ0/(dγ/dt) + ηB. Starting from this simple expression for the frictional force
and neglecting the slight variation of ηeff in the low shear rate27, we may derive the analytical solution of equation of motion (1) using the initial conditions (see Methods for details). In the quasi-steady regime d2z/dt2 → 0, the corresponding solution with the initial condition z = z* at t = t* can be written as
with k = (2/3)µ0 Δρ2 gR/ηeff. This equation is used to fit the traces of z(t) in the quasi steady flow regimes (black lines) in Figs 2e and 3a1,a2. The static friction coefficient µ0 and effective viscosity ηeff obtained from such fitting for different diameters of the sinking ball are plotted as a function of the vibration acceleration Γ in Fig. 4b,c, respectively. The corresponding values of µ0 ~ 0.5 and ηeff ~ 104 are consistent with those found in literature8,9,27.
Similar to previous studies18,19,20,21,22,23,24,25,26,27,28, we consider the effect of horizontal vibration as a controlled perturbation, or effective temperature, that modifies the mechanical properties of granular media such as yield stress and effective viscosity. For the lowest Γ the static friction coefficient deduced from this sinking ball experiment is about µ0 ~ 0.7, being comparable with the static friction coefficient µ0* (=tgθμ) ~ 0.5 that we measured from the avalanche angle θμ ≈ 25° (=tan−1 µ0*) via inclined plane without vibration [9, 10]. When the vibration intensity Γ is increased, µ0 and µ1 decrease rapidly until they approach a constant value for Γ > 2 g. Moreover, at low Γ, the values for µ0 and ηeff appear to depend on the size of the sinking ball R; one possible explanation could be the failure of the assumption of local rheology (Eq. 2) on which the mean-field description is based. Indeed, the correlation length of force chains4, i.e., 5–10d (~0.5–1 mm) is not completely negligible in comparison with the intruder size R.
Unlike rheological measurements previously reported in dry granular materials23, we notice that the external vibration does not cancel the yield stress (or µ0 appearing in Eq. 2). In our granular suspensions for the range of vibration Γ used here (Fig. 4b). As mentioned above20,21, when the horizontal vibration Γ > µ is applied to the cell containing a dry granular packing with free surface, the top layers of the material are liquefied and driven to the convective motion, while the low part moves with the container in solid body motion. This is precisely the depth at which the sinking ball gets jammed because the friction force becomes larger than the gravity (Eq. 1). Likewise, in dense granular suspensions, the friction coefficients µ0 and effective viscosity ηeff (that we assumed to be spatially homogeneous in Eq. 2) can also be expected to vary in depth as the packing density. As described in Methods, we need to use an empirical depth-dependent effective viscosity ηeff to reproduce the sinking dynamics at short times (inset of Fig. 2b). Numerical simulations or resolutions may further improve our understanding of the full rheology of a ball sinking in a granular suspension.
Interestingly, here we do not observe any significant macroscopic rearrangement of grains nor convection on the surface of the horizontally vibrated dense granular suspension. Such striking difference between dry and liquid-saturated granular packings could be partly explained by the characteristic time of rearrangement it takes for a grain to move from a cage to the next one over a distance ~d. For the dry packing we find that the free fall time is tff [=d(2ρp/(3Pg))1/2] ~ 3 ms, while for the granular suspension the fall time is tfall [=ηf/(Pgα)] ~ 50 ms for a confining pressure Pg ~ d ρp g ~ 2.5 Pa. For the vibration frequency range (f = 50–300 Hz) in our experiments, the period of the oscillatory driving is T (=1/f) ~ 10 ms, which leads to tff (dry) < T < tfall (saturated). Under such conditions, we expect that the grains in the dry granular packing have the time to move or rearrange to the new cages before the applied vibration changes the driving direction. Instead the grains in the granular suspension have not the time to rearrange during one period of external vibration.
To understand such vibration-induced liquefaction in dense granular suspensions without macroscopic plastic deformation, we propose a scenario that relies on the decrease of the friction coefficient µ0 (or yield stress) (Figs 4b and 5) as follows. Since the acoustic wavelength in water at the vibration frequency λw (=cw/f > 1 m) is much larger than the granular sample size, no gradient of acoustic pressure is induced; thus the saturating liquid should have a small impact on the elasticity of the solid skeleton (except buoyancy) in this surface-free granular suspension. Then, the weakening of the granular material is presumably ascribed to the plastic deformation of the contact network on the micro/nanometric scale by the acoustic vibration. Indeed, it has been shown that the coefficient of friction between two smooth solid spheres can be reduced via a mechanism of acoustic lubrication34, leading to the softening of the tangential contact stiffness and accordingly to a decrease of the sound velocities observed in granular packings24,30,31. To rationalize this hypothesis in disordered granular packing, we rely on a friction model developed for a multi-contact solid interface in which the shear interfacial stiffness is reduced through the slipping of micro-asperities under oscillatory shear33. If we generalize this concept by replacing the asperities by the grain contacts, we can explain the softening of the shear modulus G and thus of wave velocity observed in a 3D dense granular suspension31 via the contact slipping on the microscopic scale (i.e., involving molecular rearrangements33) without any macroscopic rearrangement of grains. As the yield stress τ0 (as well as µ0 = τ0/Pg) is roughly proportional to the shear modulus (µ0 ~ G) in a yield stress fluid3,27, we may adopt the formula developed for the shear modulus softening as31,33, µ0/µ0* ~ G/G0 ≈ 1/[1 + Γ/(2µp)) + (5/4)(Γ/(2µp))2] induced by the external vibration Γ (<1). Here µ0* is the static friction coefficient in dry granular media without external vibration and µp is the inter-particle friction coefficient. The dotted line in Fig. 4b represents the model prediction using µ0* ~ 1 and µp ~ 0.7 that compares qualitatively well with our data. These used friction coefficients are relatively high but compatible with values measured in yield experiments for granular media4,22 and for solid friction33.

(a) Comparison between model and experiment with homogeneous ηeff; (b) depth dependent ηeff; (c) comparison with inhomogeneous ηeff.
Finally we believe that this mechanism of acoustic lubrication may also partly explain the sinking of the intruder in the vibrated dry granular packing. But the effect of the packing density change needs to be accounted for due to macroscopic rearrangements31. Note that the vibration-induced random motions of grains in dry granular media observed here at the top surface were previously analysed19,22 using the concept of effective temperature determined by Γ. Interestingly, for a same external vibration Γ, our experiments showed that the ball takes a longer time in dry packings than in water-saturated packings to reach the final depth (see Supplementary Fig. S3). This result suggests that the effective viscosity (defined by Eq. 2 using the inertial number13) is higher in the dry case. Following this Teff concept, our observation would support the scenario expected by the fluctuation-dissipation relation37 applied in granular media19,38: at a given effective temperature Teff, the larger the random force (i.e. grain collision) the larger the dissipation (i.e. effective viscosity).
In summary, we have developed a non-intrusive ultrasound method to monitor the dynamics of an intruder submerged in an opaque dense granular suspension. We have found that the sinking ball in the gravitational suspension under horizontal vibration reaches rapidly a quasi-steady regime, which is well described by the frictional granular rheology. The deduced static friction coefficients and effective viscosity decrease with increasing vibration intensity. We propose a mechanism of acoustic lubrication of contacts by plastic deformation on the microscopic scale that allows us the understanding of vibration-induced fluidization, i.e. liquefaction in dense granular suspensions without plastic deformation by macroscopic rearrangements. Further studies are needed to investigate the creep-flow behaviour near jamming and the vibration-induced fluidization accompanied with macroscopic grain rearrangements and collisions as in the case of dry granular packings. We believe that this work should help to get a better understanding of the liquefaction of quicksands as well as the triggering of landslides.
Methods
Ultrasonic tracking of an intruder
The steel ball of radius R is initially at rest on the surface of the densely packed granular suspension with solid volume fraction ϕ ≈ 0.62 measured as m/(ρpV) where m is the mass of glass beads, ρp the glass density and V the volume of the bead packing, respectively. To follow the ball sinking induced by vibration in our 3D opaque suspension we employ acoustic monitoring. For this purpose, a broadband transducer (denoted by T in Fig. 1a) centred at fUS = 2.25 MHz is placed exactly above the intruder. It is used to emit short pulses and detect the echoes at a repetition rate ~100 Hz. The associated wavelength of ultrasound is λUS = cw/fUS ≈ 670 μm with cw = 1500 m/s the sound velocity in water; it is smaller than the intruder but larger than glass beads (d « λUS « 2 R). In Fig. 1b we observe two ultrasonic echoes, (i) reflected from the interface water-suspension, and (ii) from the intruder, respectively. A stack of such waveforms (Fig. 1c) shows that the arrival time of the echo from the interface does not change, while the arrival time of the echo T0 from the intruder increases when as the sinking intruder sinks further inside the suspension. We determine the position of the ball at time t (during sinking) by z(t) = (1/2) cw T0.
Analytical solution for a ball sinking
For simplicity, we rewrite Eq. 1 as,
with d = Δρ1/ρs, b = (9/2)ηeff/R2, and c = 3µ0Δρ2g/(ρsR). The solution of this second order nonhomogeneous differential equation has the form:
where λ1 = (−b/2) + (b2/4 − c)1/2 and λ2 = (−b/2) −(b2/4 − c)1/2, A and B are the constants. Considering the initial conditions at ti (≈14 s, estimated from Fig. 2), the position of the ball is z(ti) = zi ≈ 0.006 m and its velocity (dz/dt)i ≈ 2 10−4 (m/s). These give B = [(dz/dt)i + λ1(zi − d/c)]/[(λ1 − λ2) exp − (λ2 ti)] and A = [(zi − d/c) − B exp − (λ2 ti)]/exp(−λ1 ti). Replacing A and B into Eq. 6 yields,
We depict in Fig. 5a the sinking velocity dz/dz versus depth z using Eqs 7 and 8 with the static friction coefficients µ0 and effective viscosity ηeff derived from the steady sinking regime for Γ = 1.08. The solution describes correctly the sinking data at long time (linear dependence) as expected, but not at all the behaviour in the acceleration regime at short time. This is likely caused by the breakdown of the approximation on the homogeneous friction coefficients. To account for the spatial inhomogeneity of the liquefied layer by horizontal vibration, we propose an empirical depth-dependent viscous friction coefficient ηeff = ηmax [1 − exp(−k1x)] with k1 ~ 15 and x = 0.01 to 1 the dimensionless parameters corresponding to the sinking range. From this assumption we obtain an increase of the viscous coefficient by a factor of about 20 with ηmin = 4.7 103 to ηmax = 8.7 104 over the whole depth of sinking (Fig. 5b). With such depth varying ηeff, the computed solution with Eqs 7 and 8 provides a more consistent description of the experimental observation (Fig. 5c).
References
Liu, A. J. & Nagel, S. R. Jamming and Rheology (Taylor & Francis, New York, 2001).
van Hecke, M. Jamming of Soft Particles: Geometry, Mechanics, Scaling and Isostaticity. J. Phys.: Condens. Matter 80, 033101 (2010).
Coussot, P. Rheometry of pastes, suspensions and granular materials (Wiley, New York, 2005).
Andreotti, B., Forterre, Y. & Pouliquen, O. Granular Media: between fluid and solid (Cambridge University Press, 2013).
Kamrin, K. & Goddard, J. Rheology of sedimenting particle pastes. Proc. R. Soc. A. 470, 2172 (2014).
Dedegil, M. Y. Drag coefficient and settling velocity of particles in non-Newtonian suspensions. J. Fluids Eng. 109, 319 (1987).
Beris, A. N. Creeping motion of sphere through a Bingham plastic. J. Fluid Mech. 158, 219 (1985).
Fall, A. et al. Rheology of sedimenting particle pastes. J. Rheol. 57, 1237 (2013).
Boyer, F., Guazzelli, E. & Pouliquen, O. Unifying suspension and granular rheology. Phys. Rev. Lett. 107, 188301 (2011).
Jaeger, H. M., Liu, C. H., Nagel, S. R. & Witten, T. A. Friction in granular flows. Europhys. Lett. 11, 619 (1990).
GDR MiDi, On dense granular flows. Euro. Phys. J. E 14, 341 (2004).
Courrech du Ponts, S., Gondret, P., Perrin, B. & Rabaud, M. Granular avalanches in fluids. Phys. Rev. Lett. 90, 044301 (2003).
Cassar, C., Nicolas, M. & Pouliquen, O. Submarine granular flows down inclined planes. Phys. Fluids 17, 103301 (2005).
Kamrin, K. & Koval, G. Nonlocal constitutive relation for steady granular flow. Phys. Rev. Lett. 108, 178301 (2012).
Bouzid, M. et al. Non-local rheology in dense granular flows. Eur. Phys. J. E 38, 125 (2015).
Nichol, K., Zanin, A., Bastien, R., Wandersman, E. & van Hecke, M. Flow-induced agitations create a granular fluid. Phys. Rev. Lett. 104, 48 (2010).
Reddy, K., Forterre, Y. & Pouliquen, O. Evidence of mechanically activated processes in slow granular flows. Phys. Rev. Lett. 106, 108301 (2011).
Jaeger, H. M., Liu, C. H. & Nagel, S. R. Relaxation at the angle of repose. Phys. Rev. Lett. 62, 40 (1989).
D’Anna, G., Mayer, P., Barrat, A., Loreto, V. & Nori, F. Observing brownian motion in vibration-fluidized granular matter. Nature 424, 909 (2003).
Metcalfe, G., Tennakoon, S., Kondic, L., Schaeffer, D. & Behringer, R. Granular friction, Coulomb failure, and the fluid-solid transition for horizontally shaken granular materials. Phys. Rev. 65, 031302 (2002).
Aumaitre, S., Puls, C., McElwaine, J. & Gollub, J. Comparing flow thresholds and dynamics for oscillating and inclined granular layers. Phys. Rev. E 75, 061307 (2007).
Marchal, P., Smirani, N. & Choplin, L. Rheology of dense-phase vibrated powders and molecular analogies. J. Rheol. 53, 1 (2009).
Dijksman, J., Wortel, G., van Dellen, L., Dauchot, O. & van Hecke, M. Jamming, yielding, and rheology of weakly vibrated granular media. Phys. Rev. Lett. 107, 108303 (2011).
Johnson, P. & Jia, X. Nonlinear dynamics, granular media and dynamic earthquake triggering. Nature 437, 871 (2005).
Lastakowski, H., Géminard, J.-C. & Vidal, V. Granular friction: Triggering large events with small vibrations. Sci. Rep. 5, 13455 (2015).
Hanotin, C., Kiesgen de Richter, S., Marchal, P., Michot, L. & Baravian, C. Vibration-induced liquefaction of granular suspensions. Phys. Rev. Lett. 108, 198301 (2012).
Gaudel, N., Kiesgen de Richter, S., Louvet, N., Jenny, M. & Skali-Lami, S. Bulk and local rheology in a dense and vibrated granular suspension. Phys. Rev. E 96, 062905 (2017).
Khaldoun, A., Eiser, E., Wegdam, G. H. & Bonn, D. Rheology: liquefaction of quicksand under stres. Nature 437, 635 (2005).
Clément, C., Toussaint, R., Stojanova, M. & Aharonov, E. Sinking during earthquakes: Critical acceleration criteria control drained soil liquefaction. Phys. Rev. E 97, 022905 (2018).
Jia, X., Brunet, T. & Laurent, J. Elastic weakening of a dense granular pack by acoustic fluidization: slipping, compaction, and aging. Phys. Rev. E 84, 020301 (R) (2011).
Brum, J., Gennisson, J.-L., Fink, M., Tourin, A. & Jia, X. Drastic slowdown of shear wave in unjammed granular materials, arXiv:1810.08555 [cond-mat.soft].
Harisch, R., Darnige, T., Kolb, E. & Clément, E. Intruder mobility in a vibrated granular packing. Europhys. Lett. 96, 54003 (2011).
Bureau, L., Caroli, C. & Baumberger, T. Elasticity and onset of frictional dissipation at a non-sliding multi-contact interface. Proc. R. Soc. Lond. A. 459, 2787 (2003).
Léopoldès, J., Conrad, G. & Jia, X. Onset of sliding in amorphous films triggered by high-frequency oscillatory shear. Phys. Rev. Lett. 110, 248301 (2013).
DeGiuli, E. & Wyart, M. Friction law and hysteresis in granular materials. PNAS 114, 9284 (2017).
van den Wildenberg, S., Léopoldès, J., Tourin, A. & Jia, X. Acoustic monitoring of a ball sinking in vibrated granular sediments. EPJ Web of Conferences 140, 03080 (2017).
Risten, H. The Fokker-Planck equation: methods of solution and applications (Springer, Berlin 1996).
Makse, H. & Kurchan, J. Testing the thermodynamic approach to granular matter with a numerical model of a decisive experiment. Nature 415, 614 (2002).
Acknowledgements
We thank J. Goddard for the critical reading of the manuscript and references on the ball falling in Bingham fluids, J.-L. Gennisson and A. Trabattoni for helpful assistances. This work was supported by French LABEX WIFI under references ANR-10-LABX-24 and ANR-10- IDEX-0001-02 PSL.
Author information
Authors and Affiliations
Contributions
S.W. and X.J. conceived the experiments, S.W., X.J. and J.L. conducted the experiments, X.J., A.T. and S.W. made modeling. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing Interests
The authors declare no competing interests.
Additional information
Publisher’s note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
van den Wildenberg, S., Jia, X., Léopoldès, J. et al. Ultrasonic tracking of a sinking ball in a vibrated dense granular suspension. Sci Rep 9, 5460 (2019). https://doi.org/10.1038/s41598-019-41749-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-019-41749-2
- Springer Nature Limited
This article is cited by
-
Tracking the Motion of an Intruder Particle in a Three-Dimensional Granular Bed On-board the Chinese Space Station
Microgravity Science and Technology (2024)