
Abstract
The convergence analysis of a variable KM-like method for approximating common fixed points of a possibly infinitely countable family of nonexpansive mappings in a Hilbert space is proposed and proved to be strongly convergent to a common fixed point of a family of nonexpansive mappings. Our variable KM-like technique is applied to solve the split feasibility problem and the multiple-sets split feasibility problem. Especially, the minimum norm solutions of the split feasibility problem and the multiple-sets split feasibility problem are derived. Our results can be viewed as an improvement and refinement of the previously known results.
MSC:47H10, 65J20, 65J22, 65J25.
Similar content being viewed by others

1 Introduction
Problems of image reconstruction from projections can be represented by a system of linear equations
In practice, the system (1.1) is often inconsistent, and one usually seeks a point which minimizes by some predetermined optimization criterion. The problem is frequently ill-posed and there may be more than one optimal solution. The standard approach to dealing with that problem is via regularization. The well-known convex feasibility problem is to find a point satisfying the following:
where is an integer, and each is a nonempty closed convex subset of a Hilbert space H. A special case of the convex feasibility problem is the split feasibility problem given by:
Let C, Q be nonempty closed convex subsets of Hilbert spaces and , respectively, and let be a bounded linear operator. The split feasibility problem (SFP) is
The SFP is said to be consistent if (1.2) has a solution. It is easy to see that SFP (1.2) is consistent if and only if the following fixed point problem has a solution:
where and are the projections onto C and Q, respectively, and is the adjoint of A. Let L denote the spectral radius of . It is well known that if , the operator in the operator equation (1.3) is nonexpansive [1].
It has been extensively studied during the last decade because of its applications in modeling inverse problems which arise in phase retrievals and in medical image reconstruction. It has also been applied to modeling intensity-modulated radiation therapy; see, for example [2–7] and the references therein.
Several iterative methods have been proposed and analyzed to solve the SFP (1.2); see, for example [1, 3, 6, 8–14] and the references therein. Byrne [3] introduced the CQ algorithm
and proved that the sequence generated by the CQ algorithm (1.4) converges weakly to a solution of SFP (1.2), where and .
In view of the fixed point formulation (1.3) of the SFP (1.2), Xu [1] and Yang [14] applied the following perturbed Krasnosel’skiĭ-Mann CQ algorithm to solve the SFP (1.2):
Here is a sequence of operators defined by
where and are sequences of nonempty closed convex subsets in and , respectively, which obey the following assumption:
(C0) and for each , where is the ρ-distance between and Q (see Section 3.2).
It is not very easy to verify condition (C0) for each . Thus, the condition (C0) is quite restrictive even for weak convergence of the sequence defined by (1.5). One of our objectives is to relax the condition (C0).
Many practical problems can be formulated as a fixed point problem (FPP): finding an element x such that
where T is a nonexpansive self-mapping defined on a closed convex subset C of a Hilbert space H. The solution set of FPP (1.6) is denoted by . It is well known that if , then is closed and convex. The fixed point problem (1.6) is ill-posed (it may fail to have a solution, nor uniqueness of solution) in general. Regularization by contractions can removed such illness. We replace the nonexpansive mapping T by a family of contractions , with and a fixed contraction. We call f an anchoring function. The regularized problem of fixed point for T is the fixed point problem for . The mapping has a unique fixed point, namely, . Therefore, is the solution of the fixed point problem
We now discretize the regularization (1.7) to define an explicit iterative algorithm:
The iterative algorithm (1.8) is due to Moudafi [15], by generalizing Browder’s and Halpern’s methods, who introduced viscosity approximation methods. Suzuki [16] established a strong convergence theorem by using Halpern’s method to averaged mapping , for nonexpansive mappings T in certain Banach spaces. Takahashi [17] proved a strong convergence theorem of the following iterative algorithm for countable families of nonexpansive mappings in certain Banach spaces:
Recently, Yao and Xu [18] introduced and studied strong convergence of the following modified methods:
where is a fixed non-self contraction and is a sequence in satisfying the conditions:
(S1) and ,
(S2) either or as .
One can easily see that (1.10) is a regularized iterative algorithm.
Motivated by [1, 11, 14], we study the following more general non-regularized algorithm, called variable KM-like algorithm which generates a sequence according to the recursive formula:
where and are sequences in , is a sequence of nonexpansive self-mappings of C and is a sequence of (not necessarily contraction) mappings from C into H.
In the present paper, we will study the strong convergence of the proposed variable KM-like algorithm in the framework of Hilbert spaces. The paper is organized as follows. The next section contains preliminaries. In Section 3, we will study the convergence analysis of our variable KM-like algorithm for fixed point problem (1.6) without the assumption (S2). This result will be applied to prove convergence of some perturbed algorithms for the SFP (1.2) and the multiple-sets split feasibility problem under some weaker assumptions. As special cases, we obtain algorithms which converge strongly to the minimum norm solutions of the split feasibility problem and the multiple-sets split feasibility problem. Our results are new and interesting in the following contexts:
-
(i)
Our algorithm (3.1) is not regularized by contractions.
-
(ii)
is not necessarily contraction. In the existing literature, anchoring function f is a fixed contraction mapping [15, 17–19] or strongly pseudo-contraction mapping [20].
-
(iii)
In the convergence analysis of (3.1) for fixed point problem (1.6), the assumption (S2) is not required.
-
(iv)
A fixed for a (C0)-like condition is adopted.
2 Preliminaries
Let C be a nonempty subset of a Hilbert space H. Throughout the paper, we denote by the closed ball defined by . Let be two mappings. We denote by the collection of all bounded subsets of C. The deviation between and on [21], denoted by , is defined by
Let be a mapping. Then T is said to be a κ-contraction if there exists such that for all . Furthermore, it is called nonexpansive if for all .
Let be a sequence of mappings from C into H. Following [20–22], we say is a sequence of nearly contraction mappings with sequence if there exist a sequence in and a sequence in with such that
One can observe that a sequence of contraction mappings is essentially a sequence of nearly contraction mappings.
We now construct a sequence of nearly contractions.
Example 2.1 Let and . Let be a sequence of mappings defined by
Set . We consider the following cases:
Case 1: If , then
Case 2: If , then
Case 3: If and , then
Therefore, for all , we have
where . Therefore, is a sequence of nearly contraction mappings with sequence .
Let C be a nonempty closed convex subset of a Hilbert space H. We use to denote the (metric) projection from H onto C; namely, for , is the unique point in C with the property
The following is a useful characterization of projections.
Lemma 2.2 Let C be a nonempty closed convex subset of a real Hilbert space H and let be the metric projection from H onto C. Given and . Then if and only if
Lemma 2.3 [[23], Corollary 5.6.4]
Let C be a nonempty closed convex subset of H and a nonexpansive mapping. Then is demiclosed at zero, that is, if is a sequence in C weakly converging to x and if converges strongly to zero, then .
Lemma 2.4 [24]
Let and be two sequences of nonnegative real numbers and let be a sequence in ℝ satisfying the following condition:
where is a sequence in . Assume that . Then the following statements hold:
-
(a)
If for all and for some , then
where and hence is bounded.
-
(b)
If and , then converges to zero.
3 Convergence analysis of a variable KM-like algorithm
First, we prove the following.
Proposition 3.1 Let C be a nonempty closed convex subset of a real Hilbert space H, a nonexpansive mapping with and a κ-contraction. Then there exists a unique point such that .
Proof Since is a κ-contraction, it follows that is a κ-contraction from C onto itself. Then there exists a unique point such that . □
3.1 A variable KM-like algorithm
Let C be a nonempty closed convex subset of a real Hilbert space H. Let be a sequence of nearly contractions from C into H such that converges pointwise to f and let be a sequence of nonexpansive self-mappings of C which are viewed as perturbations. For computing a common fixed point of the sequence of nonexpansive mappings, we propose the following variable KM-like algorithm:
where and are sequences in .
We investigate the asymptotic behavior of the sequence generated, from an arbitrary , by the algorithm (3.1) to a common fixed point of the sequence .
Theorem 3.2 Let C be a nonempty closed convex subset of a real Hilbert space H, be a nonexpansive mapping such that , and let be a κ-contraction with such that . Let be a sequence of nearly contraction mappings from C into H with the sequence in such that , and let be a sequence of nonexpansive mappings from C into itself. For given , let be a sequence in C generated by (3.1), where is a sequence in and is a sequence in . Assume that the following conditions are satisfied:
(C1) and ,
(C2) ,
(C3) ,
(C4) .
Define
Then the following statements hold:
-
(a)
The sequence generated by (3.1) remains in the closed ball .
-
(b)
If the following assumption holds:
(C5) for all in ,
then converges strongly to .
Proof (a) Set . Observe that
From (3.1), we have
Since , by Lemma 2.4, we find that is bounded. Moreover,
Therefore, is well defined in the ball .
(b) Assume that for all in . Set . We now proceed with the following steps:
Step 1: and are bounded.
Without loss of generality, we may assume that for all for some . From (C3), we have
which implies that . Since , it follows that
Since
and converges to 0, we conclude that is bounded. Moreover,
it follows that is bounded.
Step 2: .
Set . We write
Observe that
which gives
As we have shown in Step 1, and are bounded. Observe that
and
Thus, and are bounded. Hence,
By [[25], Lemma 2.2], we obtain
which implies that
Step 3: .
Note
and hence
which implies that
Note and , we conclude that .
Step 4: .
Note that
We take a subsequence of such that
Since is in C and , we conclude, from Lemma 2.3 that . Since , we obtain from Lemma 2.2 that
Step 5: .
Since is bounded, there exists such that for all . Noting that . Hence, from (3.1), we have
which implies that
From (3.1), we have
Since and , we conclude from Lemma 2.4(b) that . □
Remark 3.3 Theorem 3.2 has the following characterization for convergence analysis of (3.1):
-
(a)
Iterates of (3.1) remains in the closed ball .
-
(b)
The assumption (S2) is not required.
-
(c)
(C4) is adopted for only for . In particular, the condition ‘ for all ’ is adopted in [[26], Theorem 3.1].
Thus, Theorem 3.2 is more general by nature. Therefore, Theorem 3.2 significantly extends and improves [[26], Theorem 3.1] and [[18], Theorem 3.2].
Theorem 3.2 remains true if condition (C4) is replaced with the condition that the mappings and T have common fixed points. In fact, we have
Theorem 3.4 Let C be a nonempty closed convex subset of a real Hilbert space H, a nonexpansive mapping such that , and be a κ-contraction with such that . Let be a sequence of nearly contraction mappings from C into H with sequence in such that . Let be a sequence of nonexpansive mappings from C into itself such that . For given , let be a sequence in C generated by (3.1), where is a sequence in and is a sequence in satisfying (C1), (C2), and (C3). Then the following statements hold:
-
(a)
The sequence generated by (3.1) remains in the closed ball , where and is given in (3.2).
-
(b)
If the assumption (C5) holds, then converges strongly to .
We now prove strong convergence of the sequence generated by (3.1) under condition (C6).
Theorem 3.5 Let C be a nonempty closed convex subset of a real Hilbert space H, be a nonexpansive mapping such that , and be a sequence of nonexpansive mappings from C into itself. Let be a κ-contraction with such that and be a sequence of -contraction mappings from C into H such that . For given , let be a sequence in C generated by (3.1), where is a sequence in and is a sequence in satisfying (C1), (C2), (C3), and (C4). Then the following statements hold:
-
(a)
The sequence generated by (3.1) remains in the closed ball , where
-
(b)
If the following assumption holds:
(C6) ,
then converges strongly to .
Proof We show that implies that for all in . Let be a sequence in . Then
It follows that . Thus, the condition (C5) in Theorem 3.2 holds. Therefore, Theorem 3.5 follows from Theorem 3.2. □
For a sequence in H with , define by
Then each is 0-contraction with . In this case algorithm (3.1) with reduces to
Corollary 3.6 Let C be a nonempty closed convex subset of a real Hilbert space H and be a nonexpansive mapping such that . Let be a sequence in H such that and . For given , let be a sequence in C generated by (3.3), where is a sequence in and is a sequence in satisfying (C1) and (C2). Then the following statements hold:
-
(a)
The sequence generated by (3.3) remains in the closed ball , where .
-
(b)
converges strongly to .
Remark 3.7 If in Corollary 3.6, then generated by Algorithm 3.3 converges strongly to the minimum norm solution of the FPP (1.6). Corollary 3.6 also provides a closed ball in which lies. Therefore, Corollary 3.6 significantly extends and improves [[27], Theorem 3.1].
3.2 The split feasibility problem
In this section we apply Theorem 3.5 to solve the SFP (1.2). We begin with the ρ-distance:
Definition 3.8 Let C and Q be two closed convex subsets of a Hilbert space H and let ρ be a positive constant. The ρ-distance between C and Q is defined by
By employing Theorem 3.5, we present a variable KM-like CQ algorithm (3.6) for finding solutions of the SFP (1.2) and prove its strong convergence.
Theorem 3.9 Let C and Q be two nonempty closed convex subsets of real Hilbert spaces and , respectively, and let and be sequences of closed convex subsets of and , respectively. Let be a κ-contraction and be a sequence of -contraction mappings from C into such that . Let be a bounded linear operator with the adjoint . For , define
and
Assume that SFP (1.2) is consistent with . For given , let be a sequence in C generated by the following variable KM-like CQ algorithm:
where is a sequence in and is a sequence in satisfying (C1), (C2), (C3), and (C4). Then the following statements hold:
-
(a)
The sequence generated by (3.6) remains in the closed ball , where
-
(b)
If and the following assumption holds:
(C7) and ,
then converges strongly to .
Proof (a) Since , T and for all are nonexpansive mappings and because SFP (1.2) is consistent. Hence this part follows from Theorem 3.5(a).
(b) Assume that
Now, let be such that . Since each is the nonexpansive, we have
Thus,
Hence condition (C6) in Theorem 3.5 holds. Therefore, Theorem 3.9(b) follows from Theorem 3.5(b). □
For a sequence in with , define by
Then each is 0-contraction with . In this case variable KM-like CQ algorithm (3.6) reduces to the following variable KM-like CQ algorithm:
We now present strong convergence of the variable KM-like CQ algorithm (3.7) to the minimum norm solution of the SFP (1.2).
Corollary 3.10 Let C and Q be two nonempty closed convex subsets of real Hilbert spaces and , respectively, and let and be sequences of closed convex subsets of and , respectively. Let be a bounded linear operator with the adjoint . For , define T and by (3.4) and (3.5), respectively. Assume that the SFP (1.2) is consistent with . For given and a sequence in with , let be a sequence in C generated by a variable KM-like CQ algorithm (3.7), is a sequence in and is a sequence in satisfying (C1), (C2), and (C4). Then the following statements hold:
-
(a)
The sequence generated by (3.7) remains in the closed ball , where
-
(b)
If and the assumption (C7) holds, then converges strongly to .
Corollary 3.10 significantly extends and improves [[11], Theorem 3.1].
3.3 The constrained multiple-sets split feasibility problem
In this section, we consider the following multiple-sets split feasibility problem which models the intensity-modulated radiation therapy [6] and has recently been investigated by many researchers, see, for example, [1, 3, 6, 8–14] and the references therein.
Let and be two Hilbert spaces and let r and p be two natural numbers. For each , let be a nonempty closed convex subset of and for each , let be a nonempty closed convex subset of . Further, for each , let be a bounded linear operator and Ω be a closed convex subset of . The (constrained) multiple-sets split feasibility problem (MSSFP) is to find a point such that
When , then the MSSFP (3.8) reduces to the SFP (1.2).
The split feasibility problem (SFP) and multiples-set split feasibility problem (MSSFP) model image retrieval [28] and intensity-modulated radiation therapy [6], and they have recently been investigated by many researchers.
For each and , let and be two positive numbers. Let be the gradient ∇ψ of a convex and continuously differentiable function defined by
Following [28], we see that
where is the adjoint of , . The nonexpansivity of implies that B is a Lipschitzian mapping with Lipschitz constant
Thus, variable KM-like CQ algorithm can be developed to solve the MSSFP (3.8). Let , and be the sequences of closed convex sets, which are viewed as perturbations for the closed convex sets Ω, and , respectively.
We now present an iterative algorithm for solving the MSSFP (3.8).
Theorem 3.11 Let be a κ-contraction and let be a sequence of -contraction mappings from Ω into such that . For , define
and
Assume that the MSSFP (3.8) is consistent with . For given , let be a sequence in Ω generated by
where is a sequence in and is a sequence in satisfying (C1), (C2), (C3), and (C4). Then the following statements hold:
-
(a)
The sequence generated by (3.12) remains in the closed ball , where
-
(b)
If and for each and , the following assumption holds:
(C8) , and ,
then converges strongly to .
Proof (a) Define
The gradients of ψ and are given by
and
Hence, from (3.12) and (3.13), we have
and
Since , T and , for all , are nonexpansive mappings, and because the MSSFP (3.8) is consistent. Hence, this part follows from Theorem 3.5(a).
(b) Assume that
Let be such that . Since each is the nonexpansive, we have
By the assumptions, we have
Hence condition (C6) in Theorem 3.5 holds. Therefore, Theorem 3.9(b) follows from Theorem 3.5(b). □
Theorem 3.11 significantly extends and improves [[12], Theorem 1].
Finally, we present strong convergence of variable KM-like CQ algorithm (3.7) to the minimum norm solution of the MSSFP (3.8).
Corollary 3.12 Define T and by (3.12) and (3.13), respectively. Assume that the MSSFP (3.8) is consistent with . For given and a sequence in with , let be a sequence in C generated by the following variable KM-like CQ algorithm:
where , is a sequence in and is a sequence in satisfying (C1), (C2), and (C4). Then the following statements hold:
-
(a)
The sequence generated by (3.12) remains in the closed ball , where
-
(b)
If and for each and , the assumption (C8) holds, then converges strongly to .
4 Numerical examples
In order to demonstrate the effectiveness, realization, and convergence of algorithm of Theorem 3.2, we consider the following example.
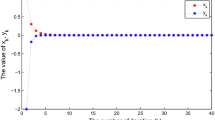
Example 4.1 Let and . Let T be a self-mapping on C defined by for all . Define in by and by for all . For each , define by (2.1). It is shown in Example 2.1 that is a sequence of nearly contraction mappings from C into H with sequence , where and . It is easy to see that converges pointwise to f, where for all . Note , , and . It can be observed that all the assumptions of Theorem 3.2 are satisfied and the sequence generated by (3.1) with converges to . In fact, under the above assumptions, the algorithm (3.1) can be simplified as follows:
The projection point of onto C can be expressed as
The iterates of algorithm (4.1) for initial guess are shown in Table 1. From Table 1, we see that the iterations converge to which is the unique fixed point of T. The convergence of each iteration is also shown in Figure 1 for comparison.

The convergence comparison of different initial values .
References
Xu HK: A variable Krasnosel’skiĭ-Mann algorithm and the multiple-set split feasibility problem. Inverse Probl. 2006, 22: 2021–2034. 10.1088/0266-5611/22/6/007
Byrne CL: Iterative oblique projection onto convex subsets and split feasibility problem. Inverse Probl. 2002, 18: 441–453. 10.1088/0266-5611/18/2/310
Byrne CL: A unified treatment of some iterative algorithms insignal processing and image reconstruction. Inverse Probl. 2004, 20: 103–120. 10.1088/0266-5611/20/1/006
Censor Y, Bortfeld T, Martin B, Trofimov A: A unified approach for inversion problems in intensity-modulated radiation therapy. Phys. Med. Biol. 2006, 51: 2353–2365. 10.1088/0031-9155/51/10/001
Censor Y, Elfving T: A multiprojection algorithm using Bregman projections in a product space. Numer. Algorithms 1994, 8: 221–239. 10.1007/BF02142692
Censor Y, Elfving T, Kopf N, Bortfeld T: The multiple-sets split feasibility problem and its applications for inverse problems. Inverse Probl. 2005, 21: 2071–2084. 10.1088/0266-5611/21/6/017
Censor Y, Motova A, Segal A: Perturbed projection and subgradient projections for multiple-sets split feasibility problem. J. Math. Anal. Appl. 2007, 327: 1244–1256. 10.1016/j.jmaa.2006.05.010
Ceng LC, Ansari QH, Yao JC: Relaxed extragradient methods for finding minimum-norm solutions of the split feasibility problem. Nonlinear Anal. 2012, 75: 2116–2125. 10.1016/j.na.2011.10.012
Ceng LC, Ansari QH, Yao JC: An extragradient method for split feasibility and fixed point problems. Comput. Math. Appl. 2012, 64: 633–642. 10.1016/j.camwa.2011.12.074
Ceng LC, Ansari QH, Yao JC: Mann type iterative methods for finding a common solution of split feasibility and fixed point problems. Positivity 2012, 16: 471–495. 10.1007/s11117-012-0174-8
Dang Y, Gao Y: The strong convergence of a KM-CQ-like algorithm for a split feasibility problem. Inverse Probl. 2011., 27: Article ID 015007
Masad E, Reich S: A note on the multiple-set split convex feasibility problem in Hilbert space. J. Nonlinear Convex Anal. 2007, 8: 367–371.
Sahu DR: Applications of the S -iteration process to constrained minimization problems and split feasibility problems. Fixed Point Theory 2011, 12: 187–204.
Yang Q: The relaxed CQ algorithm for solving the split feasibility problem. Inverse Probl. 2004, 20: 1261–1266. 10.1088/0266-5611/20/4/014
Moudafi A: Viscosity approximation methods for fixed-point problems. J. Math. Anal. Appl. 2000, 241: 46–55. 10.1006/jmaa.1999.6615
Suzuki T: Sufficient and necessary condition for Halpern’s strong convergence to fixed points of nonexpansive mappings. Proc. Am. Math. Soc. 2007, 135: 99–106.
Takahashi W: Viscosity approximation methods for countable families of nonexpansive mappings in Banach spaces. Nonlinear Anal. 2009, 70: 719–734. 10.1016/j.na.2008.01.005
Yao Y, Xu HK: Iterative methods for finding minimum-norm fixed points of nonexpansive mappings with applications. Optimization 2011, 60(6):645–658. 10.1080/02331930903582140
Xu HK: Viscosity approximation methods for nonexpansive mappings. J. Math. Anal. Appl. 2004, 298: 279–291. 10.1016/j.jmaa.2004.04.059
Sahu DR, Wong NC, Yao JC: A unified hybrid iterative method for solving variational inequalities involving generalized pseudo-contractive mappings. SIAM J. Control Optim. 2012, 50: 2335–2354. 10.1137/100798648
Sahu DR, Wong NC, Yao JC: A generalized hybrid steepest-descent method for variational inequalities in Banach spaces. Fixed Point Theory Appl. 2011., 2011: Article ID 754702
Sahu DR: Fixed points of demicontinuous nearly Lipschitzian mappings in Banach spaces. Comment. Math. Univ. Carol. 2005, 46: 653–666.
Agarwal RP, O’Regan D, Sahu DR Topological Fixed Point Theory and Its Applications 6. In Fixed Point Theory for Lipschitzian-Type Mappings with Applications. Springer, New York; 2009.
Maing PE: Approximation method for common fixed points of nonexpansive mappings in Hilbert spaces. J. Math. Anal. Appl. 2007, 325: 469–479. 10.1016/j.jmaa.2005.12.066
Suzuki T: Strong convergence theorems for infinite families of nonexpansive mappings in general Banach spaces. Fixed Point Theory Appl. 2005, 2005: 103–123.
Lopez G, Martin V, Xu HK: Perturbation techniques for nonexpansive mappings with applications. Nonlinear Anal. 2009, 10(4):2369–2383. 10.1016/j.nonrwa.2008.04.020
Yao Y, Shahzad N: New methods with perturbations for nonexpansive mappings in Hilbert spaces. Fixed Point Theory Appl. 2011., 2011: Article ID 79
Bruck RE, Reich S: A general convergence principle of nonlinear functional analysis. Nonlinear Anal. 1980, 4: 939–950. 10.1016/0362-546X(80)90006-1
Acknowledgements
This article was funded by the Deanship of Scientific Research (DSR), King Abdulaziz University, Jeddah. Therefore, the authors acknowledge with thanks DSR, for technical and financial support.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally and significantly in writing this article. All authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0), which permits use, duplication, adaptation, distribution, and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

{kind=link}
Cite this article
Latif, A., Sahu, D.R. & Ansari, Q.H. Variable KM-like algorithms for fixed point problems and split feasibility problems. Fixed Point Theory Appl 2014, 211 (2014). https://doi.org/10.1186/1687-1812-2014-211
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1812-2014-211