
Abstract
The split equality problem is a generalization of the split feasibility problem, meanwhile it is a special case of multiple-sets split equality problems. In this paper, we propose an iterative algorithm for solving the multiple-sets split equality problem whose iterative step size is split self-adaptive. The advantage of the split self-adaptive step size is that it could be obtained directly from the iterative procedure without needing to have any information of the spectral norm of the related operators. Under suitable conditions, we establish the theoretical convergence of the algorithm proposed in Hilbert spaces, and several numerical results confirm the effectiveness of the algorithm proposed.
Similar content being viewed by others
1 Introduction
There arise various linear inverse problems in phase retrieval, radiation therapy treatment, signal processing, and medical image reconstruction etc. Censor and Elfving [1] summarized one of these classes of problems and proposed a new concept which is called the split feasibility problem (SFP), and the SFP can be characterized mathematically as
where C, Q are closed, convex, and nonempty subsets of the Hilbert spaces \(H_{1}\) and \(H_{2}\), respectively, and \(A:H_{1}\mapsto H_{2}\) is a bounded and linear operator.
For solving it, Byrne [2, 3] presented the well-known CQ-algorithm, inspired by the idea of iterative scheme of fixed point theory. It is worth noting that the step size of the CQ-algorithm is fixed, depending upon the norm of the operator A. Later, Qu and Xiu [4] and Lopez et al. [5] revised the CQ-algorithm by using the Armijo-like search method and the self-adaptive step size, respectively. Both of the methods need not know the spectral norm of operator A. For more information as regards algorithms for solving the SFP, see [6, 7]. In 2005, Censor et al. [8] made an extension upon the form of SFP, replaced the convex set C with an intersection of a family of closed and convex sets, which is the original multiple-sets split feasibility problem (MSSFP), and introduced its applications for inverse problems.
Then Moudafi [9] generalized the content of SFP, to one called the split equality problem (SEP), which can be characterized mathematically as
where C, Q are closed, convex, and nonempty subsets of Hilbert spaces \(H_{1}\) and \(H_{2}\), respectively, and \(H_{3}\) is also a Hilbert space, \(A:H_{1}\mapsto H_{3}\), \(B:H_{2}\mapsto H_{3}\) are two bounded and linear operators. When \(B=I\), the SEP is just the SFP. Later, Byrne and Moudafi [10] presented the following algorithms to solve it.
Alternating CQ-algorithm:
Relaxed alternating CQ-algorithm:
We know, in order to make the sequences generated above convergent, the values of step sizes \(\gamma_{k}\) depend upon the norms of operators A, B. Then Shi et al. [11] improved Moudafi’s algorithms and obtained a strong convergent result:
But the defect is the same as Moudafi’s: that the γ above also relies upon the norms of operators A, B. For more information as regards methods solving the split equality problem, see [12, 13].
In this paper, along with Censor’s idea, we consider the multiple-sets form of the split equality problem (MSSEP), which can be characterized mathematically as
where r, t are positive integers, \(\{C_{i}\}^{r}_{i=1}\) and \(\{Q_{j}\}^{t}_{j=1}\) are closed, convex, and nonempty subsets of Hilbert spaces \(H_{1}\) and \(H_{2}\), respectively; and \(H_{3}\) is also a Hilbert space, \(A:H_{1}\mapsto H_{3}\), \(B:H_{2}\mapsto H_{3}\) are two bounded and linear operators. Obviously, when \(r=t=1\), the MSSEP reduces to the SEP. We propose an iterative algorithm with split self-adaptive step size where we need not calculate or estimate the spectral norms of related operators.
The general structure of this paper is as follows. In the next section, we provide some lemmas and definitions as well as their properties which will be useful in succedent processes. In Section 3, we present an iterative algorithm with split self-adaptive step size and provide the proof of its convergence. In Section 4, several numerical results are showed to confirm the effectiveness of our algorithm. In the last section, there are some conclusions.
2 Preliminaries
As a matter of convenience, we introduce several notations first. Let H be a real Hilbert space with inner product \(\langle\cdot,\cdot\rangle\) and norm \(\|\cdot\|\); I denotes the unit operator on H. \(x^{k}\rightarrow x\) and \(x^{k}\rightharpoonup x\) represent sequences \(\{x^{k}\}\) converging strongly and weakly to x, respectively. \(\omega_{w}(x^{k})\) denotes the weak cluster point set of sequence \(\{x^{k}\}\); \(\operatorname{Fix}(T)\) and \(T^{*}\) are the fixed points set and adjoint operator of operator T, respectively.
Next, there are several definitions and lemmas that will be available in the following proof process.
Definition 2.1
[14]
A mapping \(T:H\mapsto H\) goes by the name of
-
(i)
non-expansive, if \(\|Tx-Ty\|\leq\|x-y\|\), \(\forall x,y\in H\);
-
(ii)
firmly non-expansive, if \(\|Tx-Ty\|^{2}\leq\langle x-y,Tx-Ty\rangle\), \(\forall x,y\in H\).
Review that \(P_{C}\) is a mapping from H onto a closed, convex, and nonempty subset C of H, if
then \(P_{C}\) is called the orthogonal projection from H onto C.
Bauschke et al. presented the following properties of the orthogonal projection operator.
Lemma 2.2
[14]
Let C be a closed, convex, and nonempty subset of H, then for any \(x,y\in H\) and \(z\in C\),
-
(i)
\(\langle x-P_{C}x,z-P_{C}x\rangle\leq0\);
-
(ii)
\(\|P_{C}x-P_{C}y\|^{2}\leq\langle P_{C}x-P_{C}y,x-y\rangle\);
-
(iii)
\(\|P_{C}x-z\|^{2}\leq\|x-z\|^{2}-\|P_{C}x-x\|^{2}\).
Remark 2.2′
Based on the Cauchy-Schwarz inequality, it is not hard to show that a firmly non-expansive mapping is non-expansive. It follows from Lemma 2.2 that \(P_{C}\) is firmly non-expansive and non-expansive. It also can be deduced that \(I-P_{C}\) is firmly non-expansive and non-expansive.
Definition 2.3
[14]
Let C be a nonempty subset of H, and let \(\{x^{k}\}\) be a sequence in H. Then \(\{x^{k}\}\) is Fejér monotone with respect to C, if
Obviously, a Fejér monotone sequence \(\{x^{k}\}\) is bounded and \(\lim_{k\rightarrow\infty}\|x^{k}-z\|\) exists.
The demiclosedness principle is a perfect conclusion and plays a significant role in fixed point theory.
Lemma 2.4
Let X be a Banach space, C be a closed and convex subset of X, and \(T:C\mapsto C\) be a non-expansive mapping with \(\operatorname{Fix}(T)\neq\emptyset \). If \(\{x^{k}\}\rightharpoonup x\) and \(\{(I-T)x^{k}\}\rightarrow y\), then \((I-T)x=y\).
The following lemma is a primarily used tool in the proof of our main results.
Lemma 2.5
[17]
Let K be a closed, convex, and nonempty subset of H, and \(\{x^{k}\}\) be a sequence in H, if
-
(i)
\(\lim_{k\rightarrow\infty}\|x^{k}-x\|\) exists for each \(x\in K\);
-
(ii)
\(\omega_{w}(x^{k})\subseteq K\),
then \(\{x^{k}\}\) converges weakly to a point in K.
3 Main results
Recall the multiple-sets split equality problem (MSSEP), without loss of generality, we assume that \(t>r\) in (1.3), and make \(C_{r+1}=C_{r+2}=\cdots=C_{t}=H_{1}\), then the problem MSSEP (1.3) can be described equivalently as
Let \(S_{i}=C_{i}\times Q_{i}\subseteq H=H_{1}\times H_{2}\), \(i=1,2,\ldots,t\), \(G=[A,-B]:H\mapsto H_{3}\), \(G^{*}\) be the adjoint operator of G, then the original problem (1.3) can be modified as
Theorem 3.1
Let \(\Omega\neq\emptyset\) be the solution set of the problem MSSEP (3.2). Choose an initial point \(w_{0}\in H\) arbitrarily, the iterative sequence \(\{w^{k}\}\) with split self-adaptive step size is obtained by the following:
or component-wise
where \(0<\underline{\rho}_{1}\leq\rho_{1}^{k}\leq\bar{\rho}_{1}<1\), \(0<\underline{\rho }_{2}\leq\rho_{2}^{k}\leq\bar{\rho}_{2}<1\), \(\{\alpha_{i}\}_{i=1}^{t}>0\), then \(\{w^{k}\}\) converges weakly to a solution of the problem MSSEP (3.2).
Proof
Since \(\Omega\neq\emptyset\), taking a \(\bar{w}\in\Omega\), \(G\bar{w}=0\),
Next, we prove that the iterative sequence \(\{w^{k}\}\) is Fejér monotone with respect to Ω.
First, according to the property of the projection operator (Lemma 2.2) and the definition of an adjoint operator, we obtain the following estimations:
and
Substituting (3.6) and (3.7) into (3.5), we get
Based on the assumptions of \(\{\rho_{1}^{k}\}\) and \(\{\rho_{2}^{k}\}\), it follows from (3.8) that
w̄ is taken arbitrarily in Ω, hence, the iterative sequence \(\{w^{k}\}\) is Fejér monotone with respect to Ω. Therefore, \(\lim_{k\rightarrow\infty}\|w^{k}-\bar{w}\|\) exists.
Since \(\rho_{1}^{k}\in[\underline{\rho}_{1},\bar{\rho}_{1}]\subset(0,1)\), from (3.8) we have
Letting \(k\rightarrow\infty\) on both sides of the above inequality (3.9), we obtain
The sequence \(\{w^{k}\}\) is bounded, there exists a real number \(M>0\) such that \(\|\sum_{i=1}^{t}\alpha_{i}(P_{S_{i}}w^{k}-w^{k})\|\leq M\) for all \(k\geq0\), and \(P_{S_{i}}-I\) is non-expansive, consequently, it follows from (3.10) that
which is equal to
Analogously, due to the fact \(\rho_{2}^{k}\in[\underline{\rho}_{2},\bar {\rho}_{2}]\subset(0,1)\), from (3.8) one deduces that
letting \(k\rightarrow\infty\) in (3.12), we arrive at
Since \(\{w^{k}\}\) is bounded, and by the boundedness of A, B, we know that \(G^{*}G\) is also a bounded and linear operator, so there exists a real number \(L>0\) such that \(\|G^{*}Gw^{k}\|^{2}\leq L\), therefore,
Now, we prove that the weak cluster point set of the sequence \(\{w^{k}\}\) lies in Ω, i.e., \(\omega_{w}(w^{k})\subset\Omega\). In fact, \(\{w^{k}\}\) is bounded, then \(\omega_{w}(w^{k})\neq\emptyset\). Let \(\{ w^{k_{n}}\}\) be a subsequence of \(\{w^{k}\}\) which weakly converges to a point ŵ in \(\omega_{w}(w^{k})\). According to Lemma 2.4, we infer from (3.11) that
Since \(w^{k_{n}}\rightharpoonup\hat{w}\), by the Fréchet-Riesz representation theorem, we have
By virtue of (3.13), it follows that \(\lim_{n\rightarrow\infty}\| Gw^{k_{n}}\|=0\). Hence,
that is,
Combining (3.14) with (3.15), we conclude that \(\hat{w}\in\Omega\). Due to the fact that \(\hat{w},\bar{w}\in\Omega\) are taken arbitrarily in Ω, the conditions of Lemma 2.5 are satisfied, it follows that the iterative sequence \(\{w^{k}\}\) weakly converges to a point in Ω. The proof of Theorem 3.1 is completed. □
When \(t=1\) in Theorem 3.1, it is the iterative algorithm for solving the SEP (1.1).
Corollary 3.2
Assume that the solution set of SEP (1.1) is nonempty. For any initial point \(w^{0}\in H\), the iterative sequence \(\{w^{k}\}\) with split self-adaptive step size is obtained by
or component-wise
where \(0<\underline{\rho}_{1}\leq\rho_{1}^{k}\leq\bar{\rho}_{1}<1\), \(0<\underline {\rho}_{2}\leq\rho_{2}^{k}\leq\bar{\rho}_{2}<1\), the sequence \(\{w^{k}\}\) converges weakly to a solution of the SEP (1.1).
4 Numerical experiments
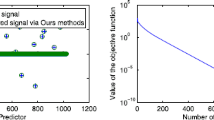
In this section, we provide several numerical results and compare with Byrne’s algorithm (1.2) in [10] to confirm the effectiveness of our proposed algorithm. The whole program was written in Wolfram Mathematica (version 9.0). All the numerical results were carried out on a personal Lenovo Thinkpad computer with Intel(R) Core(TM) i5-4200M CPU 2.50 GHz and RAM 4.00 GB.
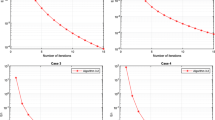
The SEP with \(A=(a_{ij})_{P\times M}\), \(B=(b_{ij})_{P\times N}\), \(C=\{x\in R^{M}|\|x\|\leq1\}\), \(Q=\{y\in R^{N}|\|y\|\leq2\}\), where \(a_{ij}\in [0,1]\), \(b_{ij}\in[0,1]\) are all generated randomly, P, M, N are positive integers. We take the initial points \(x_{0}=(1,1,\ldots,1)\in R^{M}\), \(y_{0}=(0,0,\ldots,0)\in R^{N}\), \(\rho_{1}^{k}=\rho_{2}^{k}=0.1\) in Theorem 3.1, \(\gamma_{k}=0.01\) in (1.2), and \(\|Ax-By\|<\epsilon\) as the termination condition. For P, M, N and error value ϵ, we take two values, respectively. In Tables 1-4, n and t are the iterative steps and CPU time, respectively.
From Tables 1-4, we see that, under the same conditions, both the number of iterative steps and the CPU times of our algorithm are less than Byrne’s. So to some extent, the numerical results indicate that our algorithm is better than Byrne’s.
5 Conclusions
We propose a new iterative algorithm with split self-adaptive step size to solve the multiple-sets split equality problem, which ensures that we can leave out much work on the calculation or estimation of the spectral norms of related operators. Under proper conditions, the theoretical convergence of the algorithm proposed is presented. Several numerical results confirm the effectiveness of the algorithm proposed.
References
Censor, Y, Elfving, T: A multiprojection algorithm using Bregman projections in a product space. Numer. Algorithms 8(2-4), 221-239 (1994)
Byrne, C: Iterative oblique projection onto convex sets and the split feasibility problem. Inverse Probl. 18(2), 441-453 (2002)
Byrne, C: A unified treatment of some iterative algorithms in signal processing and image reconstruction. Inverse Probl. 20(1), 103-120 (2004)
Qu, B, Xiu, N: A note on the CQ algorithm for the split feasibility problem. Inverse Probl. 21(5), 1655-1665 (2005)
Lopez, G, Martin-Marqnez, V, Wang, F, Xu, HK: Solving the split feasibility problem without prior knowledge of matrix norms. Inverse Probl. 28, 085004 (2012)
Xu, HK: A variable Krasnosel’skii-Mann algorithm and the multiple-set split feasibility problem. Inverse Probl. 22(6), 2021-2034 (2006)
Yang, Q: The relaxed CQ algorithm solving the split feasibility problem. Inverse Probl. 20(4), 1261-1266 (2004)
Censor, Y, Elfving, T, Kopf, N, Bortfeld, T: The multiple-sets split feasibility problem and its applications for inverse problems. Inverse Probl. 21(6), 2071-2084 (2005)
Moudafi, A: Alternating CQ algorithm for convex feasibility and split fixed point problems. J. Nonlinear Convex Anal. 15(4), 809-818 (2013)
Byrne, C, Moudafi, A: Extensions of the CQ algorithm for split feasibility and split equality problems. hal-00776640, version 1 (2013)
Shi, LY, Chen, RD, Wu, YJ: Strong convergence of iterative algorithms for split equality problem. J. Inequal. Appl. 2014, Article ID 478 (2014)
Dong, QL, He, SN, Zhao, J: Solving the split equality problem without prior knowledge of operator norms. Optimization 64(9), 1887-1906 (2015)
Dong, QL, He, SN: Modified projection algorithms for solving the split equality problems. Sci. World J. 2014, Article ID 328787 (2014)
Bauschke, HH, Combettes, PL: Convex Analysis and Monotone Operator Theory in Hilbert Spaces. Springer, London (2011)
Geobel, K, Kirk, WA: Topics in Metric Fixed Point Theory. Cambridge Studies in Advanced Mathematics, vol. 28. Cambridge University Press, Cambridge (1990)
Geobel, K, Reich, S: Uniform Convexity, Nonexpansive Mappings, and Hyperbolic Geometry. Dekker, New York (1984)
Opial, Z: Weak convergence of the sequence of successive approximations for nonexpansive mappings. Bull. Am. Math. Soc. 73, 595-597 (1967)
Acknowledgements
This research was supported by NSFC Grants No. 11226125, No. 11301379.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
The main idea of this paper was proposed by DT; LS and RC prepared the manuscript initially and performed all the steps of the proofs in this research. All authors read and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Tian, D., Shi, L. & Chen, R. Iterative algorithm for solving the multiple-sets split equality problem with split self-adaptive step size in Hilbert spaces. J Inequal Appl 2016, 34 (2016). https://doi.org/10.1186/s13660-016-0982-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13660-016-0982-7