
Abstract
With the rapid development of technologies such as autonomous driving and robotic navigation, the demand for accurate and reliable positioning results with BDS has increased. The current status and future development of BDS high precision services are reviewed. The operational PPP-B2b of BDS-3 achieves positioning accuracy at decimeter-level within 14 min and has the drawbacks in regional coverage and long convergence time compared with the international counterparts, such as CLAS of QZSS and HAS of Galileo. A development frame for multi-layer BDS high-precision services is proposed by considering its construction cost, compatibility of user terminal, operating maintenance burden, and service level. The global high-precision service with the improved orbit and clock accuracy enhanced with the inter-satellite link is taken as the most fundamental layer. By incorporating inter-satellite link observations, the orbit errors URE and clock errors are significantly reduced to approximately 0.05 m and 0.16 ns, respectively, which will expand PPP service to global. Based on this, the regional PPP-AR and PPP-RTK services with improved convergence performance are taken as the second layer. With PPP-AR, the convergence time drops to 10 min. With PPP-RTK, the convergence time would be further shortened to less than 3 min. The LEO enhanced PPP service is taken as the third layer which overcomes both drawbacks of the long convergence time of the inter-satellite link enhanced service (the first layer) and the regional coverage of the PPP-AR/PPP-RTK services (the second layer). The simulation results show that by introducing a LEO constellation of 288 satellites, the LEO enhanced PPP can achieve positioning accuracy better than 5 cm within approximately 1 min. In addition, the integration of LEO constellation and PPP-RTK is further proposed to enable instantaneous convergence. The implementation challenges are also presented.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Introduction
As a Chinese fundamental facility in space and timing information transfer, the development of Beidou Satellite Navigation System (BDS) follows three steps. On July 31, 2020 BDS-3 constellation including 3 GEO satellites, 3 IGSO satellites, and 24 MEO satellites was completed and started providing global services, including positioning navigation and timing services and six featured services. Currently, four systems compete on the same stage including modernized Global Positioning System (GPS), GLObal NAvigation Satellite System (GLONASS), BDS-3, and Galileo (Li et al., 2014a, 2014b, 2022b; Yang et al., 2020, 2022). As evaluated by Montenbruck et al. (2020), the Signal-in-Space Error (SISRE) of BDS, Galileo and GPS broadcast messages all are less than 1 m.
The development of economic activities derives fast and high-precision positioning services for mass-market applications (European GNSS Agency, 2019; Li et al., 2022a). Obviously, the accuracy of BDS Single Point Positioning (SPP) is only at meter-level (Chen et al., 2020) and cannot meet the demands of precise applications. Therefore, augmentation systems have been constructed to improve the accuracy, integrity, continuity, and availability of GNSS performance by broadcasting additional corrections to users (Li et al., 2018, 2020a, 2020b). The augmentation systems are divided into Ground-Based Augmentation System (GBAS) and Satellite-Based Augmentation System (SBAS) according to the broadcasting medium of augmented information (Yang et al., 2022). GBAS broadcasts the orbit and clock corrections and integrity parameters of navigation satellites to users through terrestrial radio or Internet and enables precision approach guidance (Felux et al., 2015). In 2003, Ordnance Survey (OS) Net was established as a national network of nearly 100 GPS base stations, which constantly transmit GPS-observed positioning data from UK (Nabhan et al., 2008). To provide more accurate corrections over broader areas (Hu et al., 2003), CORSnet-NSW began providing Continuously Operating Reference Stations (CORS) services in Sydney, New South Wales over a decade ago (Janssen & Haasdyk, 2011; McMahon et al., 2022). China also developed the National BeiDou Ground-based Augmentation System (NBGAS), which can provide real-time positioning services at the centimeter level accuracy and post-processing positioning with millimeter level (Li et al., 2020a, 2020b). Although GBAS provides services with high accuracy and integrity, it involves active communication of users and frequent interaction between users and the operation center. Unlike GBAS, which broadcasts augmentation corrections through ground-based network, SBAS broadcasts augmentation corrections via satellites. SBAS systems broadcast orbit and clock corrections and integrity parameters to users through GEO satellites, which improves the accuracy and integrity of GNSS services (Zheng et al., 2022). The typical SBAS systems include the Wide Area Augmentation System (WAAS) in the United States, the System of Differential Correction and Monitoring (SDCM) in Russia, the European Geostationary Navigation Overlay System (EGNOS) in Europe, the BeiDou Satellite-Based Augmentation System (BDSBAS) in China, the Mtsat Satellite-based Augmentation System (MSAS) in Japan, and the GPS Aided GEO Augmented Navigation (GAGAN) in India (Shao et al., 2020). The above-mentioned typical SBAS systems provide civil aviation users at CAT-1 phase with meter-level positioning accuracy.
Recently, another development is that GNSS constellations directly broadcast centimeter accuracy SSR corrections for PPP services free of charge (Liu et al., 2020). The new augmentation service uses the signals broadcast by the GNSS system itself to carry augmentation corrections, rather than relying on additional ground-based networks or communications satellites like GBAS or SBAS. The Centimeter-Level Augmentation Service (CLAS) is carried out on the L6D signal of Japanese Quasi-Zenith Satellite System (QZSS) and able to reach centimeter-level accuracy within 1 min in QZSS coverage around Japan within the PPP-RTK (Real-Time Kinematic) frame (Miya et al., 2016; Cabinet Office, 2018; Satoshi Kogure, 2021). Besides, QZSS also uses L6E signal to provide precise positioning services to users in the Asia–Pacific region with centimeter accuracy (Li & Chen, 2017). In Russia, GLONASS announces its PPP service plan, which is expected to be used in Emergency Road Service (ERS), unmanned driving, and precision engineering with an accuracy of 0.1 m (Revnivykh, 2019). The Galileo High Accuracy Service (HAS) is developed by the European Union and provides freely precise satellite orbit, clock, DCB, and UPD parameters of GPS L1/L5/L2C signals and Galileo E1/E5b/E5a/E6/E5 signals worldwide through E6 signal of MEO satellites (EUSpace, 2023). According to an assessment research, the RMS for the orbit Signal-In-Space Ranging Error (SISRE) is 1.6 cm and 1.4 cm for Galileo and GPS, respectively, while the RMS of the total SISRE is 10.6 cm and 11.8 cm, respectively. In addition to orbit and clock corrections, satellite code bias corrections also have a good consistency with the final code biases from DLR, with RMS of 0.29 ns, 0.27 ns, and 0.23 ns for Galileo C1C–C5Q, C1C–C7Q, and C1C–C6C, respectively, and 0.21 ns for GPS C1C-C2L (Naciri et al., 2023). The Galileo HAS is expected to provide precise real-time positioning services with horizontal positioning error at 95% better than 20 cm and vertical positioning error at 95% better than 40 cm and the convergence time globally less than 5 min and shorter in Europe. The results and preliminary analysis of the HAS initial service indicate that the HAS full-service targets are feasible (Fernandez-Hernandez et al., 2022).
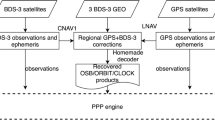
BDS-3 also provides precise corrections through PPP-B2b signals of GEO satellites (CSNO, 2019a, 2019b; Tang et al., 2022; Yang et al., 2021). With the code and phase observations at the ground stations, the operation control center generates the precise orbit and clock corrections of BDS-3 IGSO/MEO and GPS satellites and sends them to the GEO satellites. Then, the corrections are broadcasted to the users in China and surrounding areas through PPP-B2b signals (Yang et al., 2020, 2022). The PPP-B2b signal broadcasts the I-component and the Q-component with a center frequency of 1207.14 MHz and a bandwidth of 20.46 MHz, and the data modulation of the signal is Binary Phase Shift Keying (BPSK) and the message data rate is 500 bit/s. The basic frame structure of the PPP-B2b_I navigation message is described in BeiDou Navigation Satellite System Signal In Space Interface Control Document Precise Point Positioning Service Signal PPP-B2b, and users can decode the augmentation corrections according to the definition in the document. With PPP-B2b corrections, decimeter-level kinematic positioning accuracy and centimeter-level static positioning accuracy are expected. (Xu et al., 2021; Yang et al., 2022).
Emerging applications, such as autonomous driving, unmanned aerial vehicles, and smart device navigation, require high-precision positioning services, which the current BDS-3 PPP-B2b service is unable to meet because of its regional coverage and longer convergence time of more than ten minutes. The BeiDou high-precision navigation service is committed to improving its service performance in terms of convergence time and coverage. Under the guidance of the concepts of comprehensive, resilient, and secure PNT (Positioning, Navigation, and Timing), Yang et al. (2023) have emphasized the importance of establishing a high-precision Chinese spatiotemporal datum to meet the demands of high-precision navigation and positioning. Furthermore, they pointed out that BDS inter-satellite link (ISL) technology and emerging low Earth orbit (LEO) navigation augmentation technology are expected to enhance the performance of the Beidou high-precision services (Yang and Ming, 2023; Yang et al., 2024). Although some articles such as by Ge et al. (2022), Geng et al. (2011), Li et al. (2020a, 2020b), and Li et al. (2021) presented the proposals on improving precise point positioning performance of BDS, no methodologies are given on how to implement the proposals within the frame of BDS-3 system. Different from the previous studies, this contribution focuses on how to implement high precision service performances within the frame of BDS-3 system.
This contribution first summarizes the current state of BeiDou high-precision navigation service. Then the advancements improving high-precision performance within the BDS-3 frame are provided. LEO constellation enhanced BDS-3 high-precision services in terms of coverage and convergence are proposed. In “Current state of BDS high-precision services” section, we introduce the current performance indicators of BeiDou PPP-B2b services and compare them with mainstream precise navigation augmentation services worldwide. An analysis will be conducted to identify the metrics that need improvement in PPP-B2b services. In “Key technological advancements in BDS” section presents the recent technical advancements which can be realized in the BDS-3 frame for improving the high precision performance. In “Future directions of BDS high-precision services” section gives various enhancement proposals for the future development based on the LEO constellation. Finally, the proposed solutions will be summarized, along with an outlook on the future development trends, potential increments, and bottleneck issues in the high-precision services offered by BeiDou.
Current state of BDS high-precision services
BDS B2b service
PPP-B2b is the only high precision service providing decimeter level positioning accuracy among the designed BDS-3 services. PPP-B2b has been available to users since July 31, 2020. The precise orbit and clock corrections and integrity parameters for GPS and BDS-3 IGSO and MEO satellites are broadcasted to users in China through PPP-B2b signals of GEO satellites. (Liu et al., 2020; Tang et al., 2022).
The PPP-B2b signal of GEO satellites broadcasts both slow-varying augmentation information and fast-varying augmentation information. The slow-varying augmentation information is updated every 48 s, including PRN Mask, Differential Code Bias, and Orbit Correction, and User Range Accuracy Index. The fast-varying augmentation information, which refers to Clock Corrections, is updated every 6 s. The broadcast information type as well as the update interval is listed in Table 1.
The precise orbit corrections refer to the phase-center of the satellite rather than the center-of-mass. Users should no longer conduct the satellite phase center offset corrections. The PPP-B2b clock corrections refer to the phase center of L1/L2 combinations for GPS and B3I for BDS-3 satellites. Users should use the PPP-B2b broadcast DCB parameters to account for the signal-dependent delay differences. The correction approaches of the DCB parameters are in the same way as those of the broadcasted messages.
The PPP-B2b broadcast orbit and clock solutions are compared with IGS GFZ precise products for accuracy assessment. The orbit accuracy and clock accuracy are assessed separately. URE in Table 2 refers to the orbit-only URE. From Table 2, it can be concluded that GPS and BDS-3 orbit with centimeter level accuracy URE and clock solutions with 0.2 ns accuracy can be obtained with PPP-B2b broadcast information.
Six monitoring stations within China from March 22nd to March 29th 2022 are used to evaluate positioning performance of PPP-B2b services. Kinematic positioning experiments are conducted. Detailed positioning strategy is summarized in Table 3.
The convergence time is evaluated and given in Fig. 1. Convergence is defined when the orizontal positioning error is smaller than 30 cm and vertical positioning error is smaller than 60 cm for at least 5 min. The average convergent time is about 14 min for BDS-3 only positioning, while it drops to less 10 min when GPS is added.

Convergence Time of PPP-B2b Positioning Performance. Convergence is defined when the horizontal positioning error is smaller than 30 cm and vertical positioning error is smaller than 60 cm for at least 5 min. The average convergent time is about 14 min for BDS-3 only positioning, while it drops to less 10 min when GPS is added
The position error at 95% confidential level after one-hour convergence is calculated and given in Fig. 2. For BDS-3 only positioning, the horizontal positioning error (at 95%) is better than 15 cm and the vertical positioning error (at 95%) is better than 25 cm. For BDS/GPS dual-mode positioning, the horizontal positioning error (at 95%) is better than 10 cm and the vertical positioning error (at 95%) is better than 20 cm.

The position error of 95% confidential level of PPP-B2b service. For BDS-3 only positioning, the horizontal positioning error (at 95%) is better than 15 cm and the vertical positioning error (at 95%) is better than 25 cm. For BDS/GPS dual-mode positioning, the horizontal positioning error (at 95%) is better than 10 cm and the vertical positioning error (at 95%) is better than 20 cm
Comparison of BDS B2b, Galileo HAS, and QZSS
Besides PPP-B2b of BDS-3, Galileo and QZSS also provide precise positioning services. The details of the three types of precise positioning services are shown in Table 4. Compared with Galileo HAS and QZSS precise positioning services, the longer convergence time and regional coverage of PPP-B2b are noticed. Several reasons account for the longer convergence time and regional coverage. Firstly, precise corrections are broadcasted through GEO PPP-B2b signals and only regional measurements are used in orbit and clock determination, resulting that PPP service of BDS-3 is only provided around China rather than the global. Besides, compared with QZSS CLAS which serves as PPP-RTK and Galileo HAS which serves as PPP-AR, PPP-B2b of BDS-3 provides standard PPP services. Therefore, PPP-B2b users have a longer convergence time.
The next progress of BDS precise positioning services should aim at shorter convergence time and global coverage. The following sections of this paper introduce the strategies improving the coverage and convergence performance of BDS PPP.
Key technological advancements in BDS
PPP-AR and PPP-RTK
Using the precise satellite orbit and clock products broadcasted by the BDS PPP-B2b service, users can achieve real-time float PPP solutions. However, the convergence time for float PPP solutions is typically over tens of minutes, which is unacceptable for real-time precise positioning services. By adding Uncalibrated Phase Delay (UPD), ionosphere and tropospheric delays transmitted through the GEO PPP-B2b signal along with current orbit and clock corrections, PPP-RTK service instead of PPP service can be expected. The convergence time for PPP-B2b service can be further reduced to several minutes.
Wübbena et al. (2005) first put forward the notion of PPP-RTK. It serves as an advancement of the PPP model, providing users with the ability to implement ambiguity resolution and attain absolute positioning with enhanced precision and accelerated convergence speed. In the previous decade, numerous studies focused on developing diverse PPP-RTK models and assessing performances (Geng et al., 2011; Li et al., 2011; Teunissen et al., 2010). The PPP-RTK model involves the successive generation of satellite orbit, satellite clock, uncalibrated phase bias, and atmospheric delays based on undifferenced model. Using a multilayer processing scheme (Li et al., 2011, 2014a, 2014b), the precise results attained at one layer contribute to the generation of corrections at the next layer. Utilizing the atmospheric augmentation corrections based on more than 1000 stations in China, the PPP-RTK can implement instantly ambiguity resolution and obtain centimeter-level positioning accuracy in a few minutes in China.
In contrast to the Observable Space Representation (OSR) correction employed in RTK, which aggregates all GNSS-related errors into range corrections, the proposed PPP-B2b PPP-RTK corrections take the form of State Space Representation (SSR), offering a range of separate corrections. The newly broadcast information of PPP-B2b include ionospheric and tropospheric delays, as well as Uncalibrated Phase Delay (UPD). The framework of BDS PPP-RTK service can be designed as Fig. 3.

BDS PPP-AR/PPP-RTK service system. The BDS PPP-B2b PPP-RTK service system consists of three main components: the ground reference station network, the data center, and the broadcasting system. The ground reference station network is responsible for receiving GNSS observation data and transmitting it in real-time to the data center, which utilizes these observations to generate various SSR products and sends them to the broadcasting system. The broadcasting system, in turn, uploads the SSR correction data to BDS GEO satellites through satellite data annotation stations and broadcasts it to users. At the user end, by combining GNSS satellite observation data with SSR correction data from BDS GEO satellites, real-time and precise PPP-RTK positioning can be achieved rapidly. When the atmospheric corrections are not available, the PPP-RTK turns into PPP-AR. The broadcast code and phase biases products can still be used to achieve PPP ambiguity resolution (PPP-AR), which can achieve higher precision and faster convergence than the float PPP solutions
As shown in Fig. 3, the BDS PPP-B2b PPP-RTK service system consists of three main components: the ground reference station network, the data center, and the broadcasting system. The ground reference station network is responsible for receiving GNSS observation data and transmitting it in real-time to the data center, which utilizes these observations to generate various SSR products and sends them to the broadcasting system. The broadcasting system, in turn, uploads the SSR correction data to BDS GEO satellites through satellite data annotation stations and broadcasts it to users. At the user end, by combining GNSS satellite observation data with SSR correction data from BDS GEO satellites, real-time and precise PPP-RTK positioning can be achieved rapidly. When the atmospheric corrections are not available, the PPP-RTK turns into PPP-AR. The broadcast code and phase biases products can still be used to achieve PPP ambiguity resolution (PPP-AR), which can achieve higher precision and faster convergence than the float PPP solutions.
To achieve real-time and centimeter-level accuracy positioning performance, the accuracy specifications for the correction products in the service system are presented in Table 5. The code bias and UPD product are expected to achieve an accuracy of at least 0.2 ns and 0.1 cycles, respectively. The grid tropospheric and ionospheric correction products should have an accuracy of better than 2 and 5 cm, respectively. In terms of ground station distribution, to achieve PPP-AR, dozens of sparsely distributed ground stations can meet the accuracy requirements of code and phase bias products. However, to achieve PPP-RTK, a much denser ground network is required. The spacing of ground stations should be controlled between 150 and 300 km in the areas of mid to high latitudes with stable atmospheric changes, and less than 150 km in the areas of low latitudes with severe atmospheric activities. Based on the product accuracy, Table 6 provides the performance metrics concerning the BDS PPP-AR/PPP-RTK service.
It can be concluded from Table 6 that, compared with PPP-B2b service, PPP-AR and PPP-RTK improve the convergence time of BDS-3 high-precision service greatly.
Orbit and clock accuracy improvement with inter-satellite links
Precise orbit determination and clock estimation for BDS-3 precise services rely on a regional ground monitoring network. Generation of precise orbit and clock offsets for BDS-3 satellites based on the regional sparely distributed ground monitoring stations is the most important prerequisite for global precise positioning service. The inter-satellite link was once used to enhance accuracy of the broadcast orbit and clock offsets for BDS-3 satellites. This section proposes an approach for the real time determination of orbit and clock offsets with centimeter accuracy for global BDS-3 high-precision service by combing inter-satellite link measurements and the observations at regional ground spare monitoring stations. The strategy comprises of two processes. The first one is real time orbit determination to generate precise orbits and then a new precise clock offsets determination approach is followed using inter-satellite link measurements only. The strategy is organized as follows. An orbit determination process is conducted every hour by combing code and phase measurements from regional network and inter-satellite link measurements to generate BDS-3 precise orbits and the orbit predictions. The orbit prediction is used to form the broadcast precise orbit parameters. The 1-h orbit predictions are at the same level accuracy as estimated orbits. Then the inter-satellite link measurements are collected real-time and used to estimate precise clock offsets every minute. BDS-3 onboard clocks have perfect short term frequency stability and the error caused by the 1-min update interval is negligible.
The strategy of precise orbit determination of BDS-3 satellites by combining code and phase measurements at 7 ground stations distributed in Chinese mainland and inter-satellite link (ISL) measurements is given in Table 7 (Tang et al., 2018; Yang et al., 2019).
The MGEX CODE Product (Montenbruck et al., 2013) is chosen as reference to evaluate the orbit accuracy. Root mean square (RMS) values of orbit differences for all satellites are shown in Fig. 4, and the mean RMS is summarized in Table 8.

BDS-3 MEO/IGSO satellite orbit accuracy compared to MGEX CODE final products. By combing the regional network and inter-satellite link measurements, the orbit URE of IGSO satellites is larger than 0.10 m and the orbit URE of MEO satellites is better than 0.05 m
By processing inter-satellite link measurements, the differences of clock offsets between two satellites are obtained. By joint processing all the clock offsets differences with least squares adjustment, the redundant observations are used to remove measurement noise of the ISL facilities and thus high accuracy inter-satellite clock offsets are obtained.
Clock offset accuracy from MGEX CODE products and ISL measurements is evaluated using RMS of detrended residuals of clock offsets. The results demonstrate that ISL clock offsets generally have a smaller residual than CODE clock offsets, with average values of 0.16 ns and 0.21 ns for all satellites, respectively. Table 9 provides the detailed information on clock offsets, including differences between the two methods on March 2, 2022.
Illustrative examples of detrended clock offset variations between CODE products and ISLs are provided in Fig. 5 for satellites C26 and C28 relative to C38. C26 exhibits almost identical variations between the two approaches, while slight differences are observed for C28. The results suggest that ISL measurements only without ground stations may offer precise clock offsets with better accuracy than the CODE products which are estimated using hundreds of ground stations.

Detrended clock offset variations. Illustrative examples of detrended clock offset variations between CODE products and ISLs are provided in this figure for satellites C26 and C28 relative to C38. C26 exhibits almost identical variations between the two approaches, while slight differences are observed for C28. The results suggest that ISL measurements only without ground stations may offer precise clock offsets with better accuracy than the CODE products which are estimated using hundreds of ground stations
The results confirm that by combining regional code and phase measurements with inter-satellite link measurements, the orbit and clock offsets of BDS-3 satellites with centimeter accuracy can be obtained real-time, making precise positioning available to global users.
Advancement implementation
The two abovementioned technological advancements can be used to overcome the convergence problem and the regional coverage problem respectively. The key issue of the abovementioned technological advancements in BDS-3 is how to implement these in current BDS-3 frame i.e., the 3GEO + 3IGSO + 24MEO constellation. The advancements can be implemented within either the hourly-updated broadcast message of positioning, navigation, and timing service from IGSO and MEO satellites or the PPP-B2b signal from GEO satellites.
From the evaluation by Montenbruck et al., 2020, the broadcast clock parameter errors are more than 0.30 m and dominate the signal-in-space ranging errors of the hourly-updated broadcast message from IGSO and MEO satellites. The broadcast clock parameters are generated using Two-way Time Frequency Transfer and Inter-satellite link time comparisons (Chen et al., 2020). The broadcast clock parameter errors come from the ranging errors of the dual-one-way time comparisons. By using the approaches in “Orbit and clock accuracy improvement with inter-satellite links” section, the orbit and clock accuracy reach centimeter level. If the approaches in “Orbit and clock accuracy improvement with inter-satellite links” section are implemented in generating the hourly-updated broadcast orbit and clock offsets, the signal-in-space errors are expected to drop from more than 0.3 m to centimeter level. Global users can get precise point positioning results with the new broadcast orbit and clock parameters.
The orbit corrections of BDS-3 and GPS satellites are updated every 48 s, and the clock corrections of BDS-3 and GPS satellites are updated every 6 s through PPP-B2b signal of GEO satellites. The clock corrections consume more than half of the message capacity of PPP-B2b. However, as evaluated by Liu et al (2022), the Allen deviations of BDS-3 and GPS satellites onboard clocks range from 3*10–13 to 4*10–13 with averaging interval of 100 s except the GPS om-board cesium clocks. Even if the clock corrections are updated every 30 s, the accuracy loss can be less than 0.005 m. Therefore, we suggest the clock corrections update interval can be expanded. The remaining message capacity is used to broadcast the uncalibrated phase delay(UPD) parameters to enable PPP-AR.
Future directions of BDS high-precision services
LEO constellation enhanced precise point positioning
In recent years, a number of commercial entities, including American OneWeb, SpaceX, Boeing, Samsung of South Korea, and Aerospace Science and Technology Group of China, have publicly announced the development and deployment of their commercial low Earth orbit (LEO) constellations to enhance GNSS precise positioning performance, each consisting of hundreds to thousands of satellites (Magan, 2015; McDowell, 2020; Meng et al., 2018). The rapid development of the LEO constellation brings innovation for precise positioning. Compared to GNSS satellites in medium Earth orbits, LEO satellites offer advantages of rapid convergence. Combining LEO navigation satellites which broadcast navigation signals to the ground receivers and GNSS satellites, is expected to speed up the convergence process of PPP and finally provide a wide-area real-time fast convergent precise positioning service. Simulation results demonstrated that LEO augmentation can significantly reduce the PPP convergence time by approximately 80% (Ge et al., 2022; Li et al., 2019). For example, by adding LEO satellites with an altidute of 1000 km, the time for a position solution to converge to 5 cm in all three directions is expected to drop within 1 min (Li et al., 2019).
The LEO satellites track BDS-3 satellites full arc and compensate for the drawback of regional network in precise orbit and clock offset determination with abundant measurements. By combining BDS-3 measurements from regional network and onboard LEO satellites, both BDS-3 and LEO orbits and clock offsets can be estimated precisely. By taking advantage of the full-arc monitoring and rapid geometry changes of LEO satellites, a global fast convergent precise positioning services will be available. Both the drawbacks of regional coverage and longer convergence can be overcome.
The large LEO constellation augmented precise point positioning service works as Fig. 6. The frame includes LEO constellation, regional monitoring network, and the ground operation center. The regional monitoring network includes the monitoring receivers tracking BDS-3 satellites and the communication facilities. The communication path of the LEO satellites and the ground operation center includes inter-satellite links, downlinks, and upload links. The LEO satellites visual in the regional network transmit the telemetry data through downlinks directly and receive orders through upload links, while the LEO satellites not visual in the regional network transmit the telemetry data and receive orders through upload links indirectly via inter-satellite link. The LEO satellites equipped with onboard BDS-3 receivers track downlink navigation signal of BDS-3 MEO satellites. The code and carrier phase measurements of LEO onboard receivers are transferred real tim to the ground operation center through telemetry. The telemetry transmission paths include inter-satellite links, and downlinks. The transmission delay of the measurements onboard LEO satellites should be less than 1.0 s. The regional sparely distributed stations track BDS-3 MEO satellites and LEO satellites and send code and carrier phase measurements to the ground operation center. The ground operation center collects the measurements from ground stations and LEO satellites to estimate precise BDS-3 orbit and clock solutions, precise LEO orbit and clock solutions simultaneously using a real-time Kalman filter. Then the precise BDS-3 orbit and clock corrections are generated from the estimated precise BDS-3 orbit and clock solutions and uploaded to the LEO satellites. The estimated LEO orbit and clock parameters are also fitted and uploaded to the LEO satellites. The user terminals receive the broadcasted BDS-3 and LEO orbit and clock offsets and conduct the precise point positioning using BDS-3 and LEO code and phase measurements.

Operation of large LEO constellation augmented precise point positioning service. The frame includes LEO constellation, regional monitoring network, and the ground operation center. The regional monitoring network includes the monitoring receivers tracking BDS-3 satellites and the communication facilities. The communication path of the LEO satellites and the ground operation center includes inter-satellite links, downlinks, and upload links. The LEO satellites visual in the regional network transmit the telemetry data through downlinks directly and receive orders through upload links, while the LEO satellites not visual in the regional network transmit the telemetry data and receive orders through upload links indirectly via inter-satellite link. The LEO satellites equipped with onboard BDS-3 receivers track downlink navigation signal of BDS-3 MEO satellites. The code and carrier phase measurements of LEO onboard receivers are transferred real tim to the ground operation center through telemetry. The telemetry transmission paths include inter-satellite links, and downlinks. The transmission delay of the measurements onboard LEO satellites should be less than 1.0 s. The regional sparely distributed stations track BDS-3 MEO satellites and LEO satellites and send code and carrier phase measurements to the ground operation center. The ground operation center collects the measurements from ground stations and LEO satellites to estimate precise BDS-3 orbit and clock solutions, precise LEO orbit and clock solutions simultaneously using a real-time Kalman filter. Then the precise BDS-3 orbit and clock corrections are generated from the estimated precise BDS-3 orbit and clock solutions and uploaded to the LEO satellites. The estimated LEO orbit and clock parameters are also fitted and uploaded to the LEO satellites. The user terminals receive the broadcasted BDS-3 and LEO orbit and clock offsets and conduct the precise point positioning using BDS-3 and LEO code and phase measurements
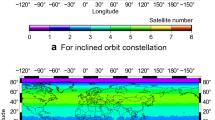
This section studies the feasibility of global rapidly convergent high-precision services enhanced with a LEO constellation consisting of 288 satellites. The LEO constellation consists of 288 satellites equally distributed in 24 orbit planes with an altitude of 1100 km and inclination of 55 degrees. Feasibility of precise BDS-3 and LEO satellites orbit determination is first assessed through a simulation. The simulated LEO constellation used to enhance BDS-3 orbit determination accuracy includes 18 satellites equally distributed in three orbit planes, a part of the 288 LEO constellation. By adding the 18 LEO satellites, all the BDS satellites can be observed by at least 2 receivers regardless of the ground stations or LEO satellites. Therefore, all the clock offsets can be estimated. The simulated BDS constellation includes 3 GEO satellites, 3 IGSO satellites, and 24 MEO satellites. The seven monitoring stations are Beijing, Shanghai, Harbin, Wulumuqi, Shantou, Chengdu, and Xian. A combined orbit and clock offsets determination of BDS and LEO satellites is done with the simulated data. The estimation strategy of orbit and clock offsets is summarized in Table 10.
Accuracy of the estimated orbit and clock offsets for BDS-3 and LEO satellites are given in Fig. 7. In the figure, 01–03 in the BDS-3 constellation represent GEO satellites, 04 ~ 06 IGSO satellites, and 07 ~ 30 MEO satellites. It can be concluded that by integrating the measurements from the regional network and LEO onboard receivers, the orbit and clock offsets of IGSO satellites, MEO satellites, and LEO satellites can be estimated with centimeter accuracy. The users tracking the IGSO satellites, MEO satellites, and LEO satellites can get precise positioning results by fixing the estimated orbits and clock offsets.

BDS-3 and LEO satellites Orbit and clock offsets accuracy estimated from the combined orbit and clock offsets determination process. In the BDS-3 constellation, 01 ~ 03 represent GEO satellites, 04 ~ 06 represent IGSO satellites, 07 ~ 30 represent MEO satellites. By combined orbit and clock offsets determination of BDS and LEO satellites proposed, the LEO satellite orbits are generated with centimeter accuracy and the LEO satellite clock offsets are at 0.1 ns accuracy. The generated GEO satellite orbits are about decimeter accuracy, while the generated ISGO and MEO satellite orbits are better than 0.1 m
The rapid convergence characterization of LEO augmented BDS precise positioning is also verified by a simulation. The simulated BDS constellation also includes 3 GEO satellites, 3 IGSO satellites, and 24 MEO satellites. The LEO constellation consists of 288 satellites equally distributed in 24 orbit planes with an altitude of 1100 km. The ground receivers simulated are located at Wulmqi (IGS station URUM) and Beijing (IGS station BJFS). There are on average 13 LEO satellites in view. The simulated code noise is at 0.3 m level and the carrier phase noise is at 3 mm. A comparison of the LEO augmented BDS and BDS-only precise point positioning is given in Figs. 8 and 9. It can be concluded that with BDS-3 only it takes more than ten minutes to get positioning results better than 5 cm for station URUM and station BJFS. However, by combining BDS-3 and LEO satellites, the convergence time drops from more than ten minutes to less than 1 min for station URUM and drops from more than ten minutes to less than 1.5 min for station BJFS. By adding LEO constellation, the convergence performance of precise positioning improves greatly.

Comparison of LEO augmented BDS precise point positioning errors with BDS precise point positioning errors at the first 60 min for station URUM.. It can be concluded that with BDS-3 only it takes more than ten minutes to get positioning results better than 5 cm for station URUM and station BJFS. However, by combining BDS-3 and LEO satellites, the convergence time drops from more than ten minutes to less than 1 min for station URUM and drops from more than ten minutes to less than 1.5 min for station BJFS. By adding LEO constellation, the convergence performance of precise positioning improves greatly

Comparison of LEO augmented BDS precise point positioning errors with BDS precise point positioning errors at the first 60 min for station BJFS.. It can be concluded that with BDS-3 only it takes more than ten minutes to get positioning results better than 5 cm for station URUM and station BJFS. However, by combining BDS-3 and LEO satellites, the convergence time drops from more than ten minutes to less than 1 min for station URUM and drops from more than ten minutes to less than 1.5 min for station BJFS. By adding LEO constellation, the convergence performance of precise positioning improves greatly
LEO augmented PPP-RTK: ground, satellite, and LEO integrated augmentation service
Low earth orbit (LEO) satellites with an orbit altitude ranging from 300 to 1500 km have stronger signal strength and faster geometry change compared to GNSS satellites, which helps realize rapid PPP. Combining PPP-RTK with low Earth orbit augmentation has the potential to achieve instant ambiguity resolution in a sparse reference station network, extend the coverage of PPP-RTK, and provide wide-area instant positioning services with an accuracy at centimeter level for massive users.
The LEO/GNSS PPP-RTK system, integrated together with LEO/GNSS PPP system, includes two components: server- and user-side. The specific processing procedure is illustrated in Fig. 10. On the server side, GNSS and LEO observations from the ground reference network are processed to generate precision satellite orbits, clocks, UPDs, and atmospheric augmentation corrections. On the client side, various users can implement GNSS/LEO convergent PPP, PPP-AR, and PPP-RTK using the various corrections provided by the server according to their own needs and scenarios.

System structure of LEO/GNSS integrated PPP-RTK system. On the server side, GNSS and LEO observations from the ground reference network are processed to generate precision satellite orbits, clocks, UPDs, and atmospheric augmentation corrections. On the client side, various users can implement GNSS/LEO convergent PPP, PPP-AR, and PPP-RTK using the various corrections provided by the server according to their own needs and scenarios
In 2020, the BDS-3 global satellite navigation system was officially completed. Since BDS is a hybrid constellation navigation system of GEO, MEO and LEO satellites, the inclusion of low earth orbit constellation satellites is a vital step in enhancing the BDS navigation solution. To apply the LEO enhanced PPP-RTK technology to the BDS project, the receivers should be upgraded to receive the LEO satellite signals and the atmospheric corrections corresponding to the LEO satellites should also be broadcasted.
To analyze the effectiveness of PPP-RTK with LEO augmentation, the observations from the 288-LEO constellation are simulated and a regional network is employed with an average spacing of 200 km. The evaluation and comparison of the convergence time and positioning accuracy were performed for BDS PPP (C_PPP), BDS + LEO PPP (CL_PPP), BDS + LEO PPP-AR (CL_PPP-AR), and BDS + LEO PPP-RTK (CL_PPP-RTK) solutions in this study. In PPP-RTK solution, the three reference stations are used to derive the atmospheric corrections, with accuracy better than 2 cm and 5 cm for the tropospheric and ionospheric corrections, respectively. From Fig. 11, it is revealed that the convergence time of CL_PPP-RTK was significantly shorter than C_PPP, CL_PPP, and CL_PPP-AR solutions highlighting the superior performance of CL_PPP-RTK. Moreover, the use of LEO satellites and PPP-RTK also improved the positioning accuracy by about 90% from C_PPP to CL_PPP-RTK. These results demonstrate the significant benefits of incorporating LEO satellites and PPP-RTK methods in improving the positioning accuracy and convergence time of GNSS-based applications.

The distribution of regional network (a) and positioning performance of LEO-augmented PPP-RTK (b). From this figure, it is revealed that the convergence time of CL_PPP-RTK was significantly shorter than C_PPP, CL_PPP, and CL_PPP-AR solutions highlighting the superior performance of CL_PPP-RTK. Moreover, the use of LEO satellites and PPP-RTK also improved the positioning accuracy by about 90% from C_PPP to CL_PPP-RTK. These results demonstrate the significant benefits of incorporating LEO satellites and PPP-RTK methods in improving the positioning accuracy and convergence time of GNSS-based applications
In the future, with the improvement of the BDS’s relevant ground facilities, research on the LEO enhanced PPP-RTK using real LEO data is expected to be carried out.
A multi-layer high-precision service frame for the future BDS
Based on the BDS high-precision services, a multi-layer high precision service frame overcoming the drawbacks of regional coverage and longer convergence time is proposed. The multi-layer high precision service frame is organized in terms of construction cost, compatibility of user terminal, operating maintenance burden, and service level. The further BDS multi-layer High-Precision Service Frame is described in Fig. 12.
-
The most fundamental layer is the global high-precision service with improved orbit and clock accuracy enhanced by inter-satellite links. Implementation of this service does not need addition or updating of any ground facilities and on-board payloads and modification of interface control document. By carrying out the approaches in “Orbit and clock accuracy improvement with inter-satellite links” section, the signal-in-space accuracy will be improved to centimeter level and high-precision positioning results will be available for global users. This kind of service overcomes the drawback of regional coverage but still suffers from long convergence time, since it is standard PPP. Due to its low cost and compatibility with old user terminal, this kind of service is used as the most fundamental service.
-
In the second layer, the regional PPP-AR and PPP-RTK are used for convergence improvement. PPP-AR can be implemented within the current GEO PPP-B2b frame by modifying the interface control document and the user terminals. However, the current BDS-3 constellation and technical status of the GEO satellites are not necessarily modified. Therefore, PPP-AR under the GEO PPP-B2b frame is taken as the second layer of high-precision service. PPP-RTK is usually implemented locally due to its dependency on a tense network. The messages of PPP-RTK are usually not transmitted through satellites due to the large amount of data to be transferred.
-
In the third layer, the LEO enhanced global PPP service is the one used to overcome both drawbacks of regional coverage and long convergence time. The LEO satellites play the roles in moving monitoring stations, broadcast channel, and ranging sources. The construction cost is much larger than other solutions since LEO constellation should be deployed. The operating maintenance burden is also increased since the ground operation center manages not only the MEO/IGSO/GEO satellites but also hundreds of LEO satellites. It brings new opportunities and challenges.
-
LEO augmented PPP-RTK realizes instantaneous precise positioning solutions. By adding the stations of a tense network, users can realize instantaneous precise positioning solution. It is usually implemented locally.

The multi-layer High-Precision Service Frame for the Future BDS. The multi-layer high precision service frame is organized in terms of construction cost, compatibility of user terminal, operating maintenance burden, and service level. The most fundamental layer is the global high-precision service with improved orbit and clock accuracy enhanced by inter-satellite links. Implementation of this service does not need addition or updating of any ground facilities and on-board payloads and modification of interface control document. By carrying out the approaches in “Orbit and clock accuracy improvement with inter-satellite links” section, the signal-in-space accuracy will be improved to centimeter level and high-precision positioning results will be available for global users. This kind of service overcomes the drawback of regional coverage but still suffers from long convergence time, since it is standard PPP. Due to its low cost and compatibility with old user terminal, this kind of service is used as the most fundamental service. In the second layer, the regional PPP-AR and PPP-RTK are used for convergence improvement. PPP-AR can be implemented within the current GEO PPP-B2b frame by modifying the interface control document and the user terminals. However, the current BDS-3 constellation and technical status of the GEO satellites are not necessarily modified. Therefore, PPP-AR under the GEO PPP-B2b frame is taken as the second layer of high-precision service. PPP-RTK is usually implemented locally due to its dependency on a tense network. The messages of PPP-RTK are usually not transmitted through satellites due to the large amount of data to be transferred. In the third layer, the LEO enhanced global PPP service is the one used to overcome both drawbacks of regional coverage and long convergence time. The LEO satellites play the roles in moving monitoring stations, broadcast channel, and ranging sources. The construction cost is much larger than other solutions since LEO constellation should be deployed. The operating maintenance burden is also increased since the ground operation center manages not only the MEO/IGSO/GEO satellites but also hundreds of LEO satellites. It brings new opportunities and challenges. LEO augmented PPP-RTK realizes instantaneous precise positioning solutions. By adding the stations of a tense network, users can realize instantaneous precise positioning solution. It is usually implemented locally
Conclusions and discussions
BDS-3 provides PPP as a featured service, which has been made accessible to users since July 31, 2020. In this study, the accuracy of various augmentation corrections provided by PPP-B2b services and positioning performance are analyzed. The results exhibit that centimeter-level precision in both orbit and clock solutions is achievable by exploiting the PPP-B2b broadcasted information. PPP-B2b enables kinematic positioning with an accuracy at decimeter-level. However, when the performance of PPP-B2b services is compared to the world's leading augmentation services such as Galileo's HAS and QZSS's CLAS, the BDS PPP-B2b service needs to be improved in terms of accuracy and convergence time. Furthermore, many new developments, such as autonomous driving, the Internet of Things (IoT), and smart cities, require high-precision positioning. Therefore the BeiDou high-precision navigation service should satisfy real-time, dynamic, and high-precision goals, enhancing service performance to meet the increasing expectations of users. The current PPP-B2b cannot meet all the requirements.
To further improve the performance of PPP-B2b service, this study puts forward two kinds of schemes. One can be realized in the BDS-3 frame, while the other will be realized in the future development by combing the LEO satellites.
Two approaches are proposed under BDS-3 frame. The first one is to combine PPP-RTK technology with PPP-B2b service to ensure that users can achieve PPP ambiguity resolution within minutes by adding high-precision atmospheric products to the PPP-B2b augmentation signals. The second one is to utilize the inter-satellite links of BDS. The results demonstrate that by combining the measurements at regional monitoring stations and inter-satellite link measurements, the orbit and clock offsets of BDS-3 satellites with centimeter accuracy can be obtained throughout their full arc, making precise positioning available to global users.
In addition, the LEO constellation can also compensate for the drawback of BDS regional network. The results of the simulation experiments show that by integrating the measurements from regional networks and LEO onboard receivers, the orbit and clock offsets of IGSO, MEO, and LEO satellites can be estimated simultaneously with centimeter accuracy. Furthermore, the addition of a LEO constellation with 288 satellites significantly improves the convergence performance. Finally, the LEO augmented PPP-RTK approach is also proposed. The results show that the LEO constellation greatly improves positioning performance of the PPP-RTK solutions. In the future, with the improvement of the BDS's relevant ground facilities, the research on LEO enhanced PPP-RTK using real LEO data should be carried out.
The above-mentioned precise positioning services are compared in Table 11. It can be concluded that precise navigation with inter-satellite link measurements enables estimating orbit and clock offsets with centimeter accuracy and expanding the coverage area of precise point positioning service from regional to global scales. Both PPP-RTK and large LEO constellation augmented PPP reduce the convergence time greatly from tens of minutes to about 1 min. Densely distributed stations are usually required in PPP-RTK. Therefore, PPP-RTK are usually provided regionally rather than globally. It is possible to provide globally rapid convergent PPP services with regional sparely distributed stations through large LEO constellation Augmented PPP. Also, by combining PPP-RTK and LEO constellations, users can obtain instantaneous convergent positioning result through large LEO constellation Augmented PPP-RTK.
Considering the ground station distribution requirements of the above solutions, a multi-layered high-precision navigation services architecture is proposed. Firstly, taking inter-satellite link enhanced BDS-3 precise navigation as the fundamental solution for global high-precision services. Then taking densely distributed stations augmented PPP-RTK as regional augmentations. Finally, taking LEO constellation enhanced PPP services as the increment for the future development. The multi-layered high-precision navigation services architecture is used to aid the decision making on high-precision service development.
However, the implementation may also encounter several challenges. Firstly, the widespread applications of BeiDou high-precision navigation services could potentially strain the system, necessitating effective management and optimization of service capabilities to ensure stable operations. Secondly, with a more complex augmented service framework, establishing a comprehensive integrity monitoring system becomes imperative to safeguard the reliability of the services. Overall, the prospects for BeiDou high-precision services are promising, but continual adaptation and resolution of new challenges are essential to maintain its leading position in the field of precision navigation.
Availability of data and materials
The derived result data is available under request.
Abbreviations
- BDS:
-
BeiDou navigation satellite system
- GEO:
-
Geostationray earth orbit
- IGSO:
-
Inclined geostationray earth orbit
- MEO:
-
Medium earth orbit
- LEO:
-
Low earth orbit
- SISRE:
-
Signal-in-space ranging error
- GBAS:
-
Ground based augmentation system
- SBAS:
-
Satellite based augmentation system
- PPP:
-
Precise point positioning
- PPP-AR:
-
Precise point positioning with ambiguity resolution
- PPP-RTK:
-
Precise point positioning real-time kinematic
References
Cabinet Office. (2018). Quasi-Zenith satellite system interface specification centimeter level augmentation service.
Chen, J., Hu, X., Tang, C., Zhou, S., Yang, Y., Pan, J., Ren, H., Ma, Y., Tian, Q., Wu, B., & Yu, Y. (2020). SIS accuracy and service performance of the BDS-3 basic system. Science China: Physics, Mechanics and Astronomy, 63(6), 269511.
CSNO. (2019a). Development of the BeiDou Navigation Satellite System (Version 4.0). Retrieved February 24, 2023, from http://www.beidou.gov.cn/xt/gfxz/201912/P020191227430565455478.pdf
CSNO. (2019b). BeiDou Navigation Satellite System signal in space interface control document-precise point positioning service signal PPP-B2b (China Satellite Navigation Office, 2019).
ESA (European GNSS Agency). (2019). PPP-RTK market and technology report.
EUSpace. (2023). Galileo high accuracy service service definition document.
Felux, M., Lee, J., & Holzapfel, F. (2015). GBAS ground monitoring requirements from an airworthiness perspective. GPS Solutions, 19, 393–401. https://doi.org/10.1007/s10291-014-0398-0
Fernandez-Hernandez, I., Chamorro-Moreno, A., Cancela-Diaz, S., Calle-Calle, J. D., Zoccarato, P., Blonski, D., Senni, T., de Blas, F. J., Hernández, C., Simón, J., & Mozo, A. (2022). Galileo high accuracy service: Initial definition and performance. GPS Solutions, 26, 65. https://doi.org/10.1007/s10291-022-01247-x
Ge, H., Li, B., Jia, S., Nie, L., Wu, T., Yang, Z., Shang, J., Zheng, Y., & Ge, M. (2022). LEO enhanced global navigation satellite system (LeGNSS): Progress, opportunities, and challenges. Geo-Spatial Information Science, 25(1), 1–13. https://doi.org/10.1080/10095020.2021.1978277
Geng, J., Teferle, F. N., Meng, X., & Dodson, A. H. (2011). Towards PPP-RTK: Ambiguity resolution in real-time precise point positioning. Advances in Space Research, 47(10), 1664–1673.
Hu, G. R., Khoo, H. S., Goh, P. C., & Law, C. L. (2003). Development and assessment of GPS virtual reference stations for RTK positioning. Journal of Geodesy, 77, 292–302. https://doi.org/10.1007/s00190-003-0327-4
Janssen, V., & Haasdyk, J (2011). Assessment of network RTK performance using CORSnet-NSW. In Proceedings of international global navigation satellite system society (pp. 1–18).
Kogure, S. (2021). QZSS Update. In China satellite navigation conference 2021.
Li, R., Zheng, S., Wang, E., et al. (2020a). Advances in BeiDou navigation satellite system (BDS) and satellite navigation augmentation technologies. Satellite Navigation, 1, 12. https://doi.org/10.1186/s43020-020-00010-2
Li, R., Zheng, S., Wang, Z., et al. (2018). Evaluation of GNSS signal-in space continuity: A Weibull-distribution-based method. Chinese Journal of Electronics, 27(3), 634–640.
Li, T., Wang, J., & Laurichesse, D. (2014a). Modeling and quality control for reliable precise point positioning integer ambiguity resolution with GNSS modernization. GPS Solutions, 18(3), 429–442. https://doi.org/10.1007/s10291-013-0342-8
Li, X., Dick, G., Ge, M., Helse, S., Wickert, J., & Bender, M. (2014b). Real-time GPS sensing of atmospheric water vapor: Precise point positioning with orbit, clock, and phase delay corrections. Geophysical Research Letters, 41, 3615–3621. https://doi.org/10.1002/2013GL058721
Li, X., Huang, J., Li, X., Lyu, H., Wang, B., Xiong, Y., & Xie, W. (2021). Multi-constellation GNSS PPP instantaneous ambiguity resolution with precise atmospheric corrections augmentation. GPS Solutions, 25(3), 1–13.
Li, X., Li, X., Liu, G., Yuan, Y., Freeshah, M., Zhang, K., & Zhou, F. (2020b). BDS multi-frequency PPP ambiguity resolution with new B2a/B2b/B2a + b signals and legacy B1I/B3I signals. Journal of Geodesy, 94, 1–15. https://doi.org/10.1007/s00190-020-01439-8
Li, X., Ma, F., Li, X., Lv, H., Bian, L., Jiang, Z., & Zhang, X. (2019). LEO constellation-augmented multi-GNSS for rapid PPP convergence. Journal of Geodesy, 93(5), 749–764. https://doi.org/10.1007/s00190-018-1195-2
Li, X., Wang, B., Li, X., Huang, J., Lyu, H., & Han, X. (2022a). Principle and performance of multi-frequency and multi-GNSS PPP-RTK. Satellite Navigation, 3, 7. https://doi.org/10.1186/s43020-022-00068-0
Li, X., Wang, Q., Wu, J., Yuan, Y., Xiong, Y., Gong, X., & Wu, Z. (2022b). Multi-GNSS products and services at iGMAS Wuhan innovation application center: Strategy and evaluation. Satellite Navigation, 3, 20. https://doi.org/10.1186/s43020-022-00081-3
Li, X., Zhang, X., & Ge, M. (2011). Regional reference network augmented precise point positioning for instantaneous ambiguity resolution. Journal of Geodesy, 85(3), 151–158. https://doi.org/10.1007/s00190-010-0424-0
Li, Z., & Chen, Fu. (2017). Improving availability and accuracy of GPS/BDS positioning using QZSS for single receiver. Acta Geodaetica Et Geophysica, 52(2017), 95–109.
Liu, C., Gao, W., Liu, T., Wan, D., Yao, Z., Gao, Y., Nie, X., Wang, W., Li, D., Zhang, W., Wang, D., & Rao, Y. (2020). Design and implementation of a BDS precise point positioning service. Navigation, 67(4), 875–891. https://doi.org/10.1002/navi.392
Liu, J., Tang, C., Zhou, S., et al. (2022). Research on short-term performance and update frequency of PPP-B2b real-time precise clock difference. Progress in Astronomy, 40(4), 614–627.
Magan V. (2015). Samsung exec envisions LEO constellation for satellite internet connectivity. Via Satellite. https://www.satellitetoday.com/telecom/2015/08/18/samsung-exec-envisions-leo-constellation-for-satellite-internet-connectivity/
McDowell, J. C. (2020). The low earth orbit satellite population and impacts of the SpaceX Starlink constellation. The Astrophysical Journal Letters, 892(2), L36. https://doi.org/10.3847/2041-8213/ab8016
McMahon, S., & Paudyal, D. R. (2022). Assessing quality of CORnet-NSW infrastructure for use in regional New South Wales, Australia. In ISPRS Annals of the photogrammetry, remote sensing and spatial information sciences, V-4-2022 (pp. 153-161). https://doi.org/10.5194/isprs-annals-V-4-2022-153-2022
Meng, Y., Bian, L., Wang, Y., Yan, T., Lei, W., He, M., & Li, X. (2018). Global navigation augmentation system based on Hongyan satellite constellation. Space International, 10, 20–27.
Montenbruck O., Steigenberger P., & Hauschild A. (2020). Comparing the ‘Big 4’—a user's view on GNSS performance. In IEEE/ION Position, Location and Navigation Symposium (PLANS) (pp. 407–418). https://doi.org/10.1109/PLANS46316.2020.9110208
Nabhan, M., A., Masri, S., A., Balachandran, W., & Hunaiti, Z. (2008). A critical assessment for RINEX data from OS NET for GPS accuracy improvement. In 2008 IEEE/ACS international conference on computer systems and applications (pp. 396–402). https://doi.org/10.1109/AICCSA.2008.4493564
Naciri, N., Yi, D., Bisnath, S., de Blas, F. J., & Capua, R. (2023). Assessment of Galileo high accuracy service (HAS) test signals and preliminary positioning performance. GPS Solutions, 27, 73. https://doi.org/10.1007/s10291-023-01410-y
Revnivykh, I. (2019). GLONASS and SDCM status and development. ICG-14.
Shao, B., Ding, Q., & Wu, X. (2020). Estimation method of SBAS dual-frequency range error integrity parameter. Satellite Navigation, 1, 9. https://doi.org/10.1186/s43020-020-00011-1
Tang, C., Hu, X., Chen, J., Liu, L., Zhou, S., Guo, R., et al. (2022). Orbit determination, clock estimation and performance evaluation of bds-3 ppp-b2b service. Journal of Geodesy, 96(9), 1–17.
Tang, C., Hu, X., Zhou, S., et al. (2018). Initial results of centralized autonomous orbit determination of the new-generation BDS satellites with inter-satellite link measurements. Journal of Geodesy, 92(10), 1–15. https://doi.org/10.1007/s00190-018-1113-7
Teunissen, P. J. G., Odijk, D., & Zhang, B. (2010). PPP-RTK: Results of CORS network-based PPP with integer ambiguity resolution. Journal of Aeronautics, Astronautics and Aviation, Series A, 42(4), 223–230.
Xu, Y., Yang, Y., & Li, J. (2021). Performance evaluation of bds-3 ppp-b2b precise point positioning service. GPS Solutions, 25(4), 1–14.
Yang, Y., Ding, Q., Gao, W., et al. (2022). Principle and performance of BDSBAS and PPP-B2b of BDS-3. Satellite Navigation, 3, 5. https://doi.org/10.1186/s43020-022-00066-2
Yang, Y., Liu, L., Li, J., Yang, Y., Zhang, T., Mao, Y., Sun, B., & Ren, X. (2021). Featured services and performance of BDS-3. Science Bulletin, 66(20), 2135–2143.
Yang, Y., Mao, Y., Ren, X., Jia, X., & Sun, B. (2024). Demand and key technology for a LEO constellation as augmentation of satellite navigation systems. Satellite Navigation, 5(1), 11. https://doi.org/10.1186/s43020-024-00133-w
Yang, Y., Mao, Y., & Sun, B. (2020). Basic performance and future developments of BeiDou global navigation satellite system. Satellite Navigation, 1(1), 1–8. https://doi.org/10.1186/s43020-019-0006-0
Yang, Y., Ren, X., Jia, X., & Sun, B. (2023). Development trends of the national secure PNT system based on BDS. Science China Earth Sciences, 66(5), 929–938. https://doi.org/10.1007/s11430-022-1069-7
Yang, Y. X., & Ming, F. (2023). Current status and future development of spatiotemporal datum construction in China. Science China Earth Sciences, 66, 2162–2165. https://doi.org/10.1007/s11430-023-1163-2
Yang, Y., Yang, Y., Hu, X., et al. (2019). Inter-satellite link enhanced orbit determination for BeiDou-3. Journal of Navigation, 2019, 1–16. https://doi.org/10.1017/S0373463319000523
Zheng, S., Gao, M., Huang, Z., Jin, X., & Li, K. (2022). Satellite integrity monitoring for satellite-based augmentation system: An improved covariance-based method. Satellite Navigation, 3, 9. https://doi.org/10.1186/s43020-022-00070-6
Acknowledgements
Not applicable.
Funding
This work was sponsored by the National Natural Science Foundation of China (Grant Nos.41974041, 42374044).
Author information
Authors and Affiliations
Contributions
Weiguang Gao and Wei Zhou proposed the idea, evaluated service performance of PPP-B2b and wrote the paper. Xingxing Li and Yongqiang Yuan conducted LEO augmented positioning and PPP-RTK experiments. Chengpan Tang and Xiaogong Hu conducted ISL enhanced orbit and clock estimation experiments. Weiguang Gao and Wei Zhou conducted the LEO augmented BDS orbit determination experiments.
Corresponding authors
Ethics declarations
Competing interests
Xingxing Li is an editorial board member for Satellite Navigation and was not involved in the editorial review or decision to publish this article. All authors declare that they have no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
GAO, W., Zhou, W., Tang, C. et al. High-precision services of BeiDou navigation satellite system (BDS): current state, achievements, and future directions. Satell Navig 5, 20 (2024). https://doi.org/10.1186/s43020-024-00143-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s43020-024-00143-8