
Abstract
Traditional aquaponics systems were arranged in a single process loop that directs nutrient-rich water from fish to the plants and back. Given the differing specific nutrient and environmental requirements of plants and fish, such systems presented a compromise to the ideal conditions for rearing of both, thus reducing the efficiency and productivity of such coupled systems. More recently, designs that allow for decoupling of units provide for a more finely tuned regulation of the process water in each of the respective units while also allowing for better recycling of nutrients from sludge. Suspended solids from the fish (e.g. faeces and uneaten feed) need to be removed from the process water before water can be directed to plants in order to prevent clogging of hydroponic systems, a step that represents a significant loss of total nutrients, most importantly phosphorus. The reuse of sludge and mobilization of nutrients contained within that sludge present a number of engineering challenges that, if addressed creatively, can dramatically increase the efficiency and sustainability of aquaponics systems. One solution is to separate, or when there are pathogens or production problems, to isolate components of the system, thus maximizing overall control and efficiency of each component, while reducing compromises between the conditions and species-specific requirements of each subsystem. Another potential innovation that is made possible by the decoupling of units involves introducing additional loops wherein bioreactors can be used to treat sludge. An additional distillation loop can ensure increased nutrient concentrations to the hydroponics unit while, at the same time, reducing adverse effects on fish health from high nutrient levels in the RAS unit. Several studies have documented the aerobic and anaerobic digestion performance of bioreactors for treating sludge, but the benefits of the digestate on plant growth are not well-researched. Both remineralization and distillation components consequently have a high unexplored potential to improve decoupled aquaponics systems.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others
Keywords
- Decoupled aquaponics
- Multi-loop aquaponics
- System dynamics
- System design
- Anaerobic digestion
- Desalination
1 Introduction
As discussed in Chaps. 5 and 7, single-loop aquaponics systems are well-researched, but such systems have a suboptimal overall efficiency (Goddek et al. 2016; Goddek and Keesman 2018). As aquaponics scales up to industrial-level production, there has been emphasis on increasing the economic viability of such systems. One of the best opportunities to optimize production in terms of harvest yield can be accomplished by uncoupling the components within an aquaponics system to ensure optimal growth conditions for both fish and plants. Decoupled systems differ from coupled systems insomuch as they separate the water and nutrient loops of both the aquaculture and hydroponics unit from each another and thus provide a control of the water chemistry in both systems. Figure 8.1 provides a schematic overview of a traditional coupled system (A), a decoupled two-loop system (B), and a decoupled multi-loop system (C). However, there is considerable debate whether decoupled aquaponics systems are economically advantageous over more traditional systems, given that they require more infrastructure. In order to answer that question, it is necessary to consider different system designs in order to identify their strengths and weaknesses.

The evolution of aquaponics systems. (a) shows a traditional one-loop aquaponics system, (b) a simple decoupled aquaponics system, and (c) a decoupled multi-loop aquaponics system. The blue font stands for water input, output, and flows and the red for waste products
The concept of a coupled one-loop aquaponics system as shown in Fig. 8.1a can be regarded as the traditional basis of all aquaponics systems in which water recirculates freely between the aquaculture and hydroponics units, while nutrient-rich sludge is discharged. One of the key drawbacks of such systems is that it is necessary to make trade-offs in the rearing conditions of both subsystems in terms of pH, temperature, and nutrient concentrations (Table 8.1).
In contrast, decoupled or two-loop aquaponics systems separate the aquaculture and aquaponics units from each other (Fig. 8.1b). Here, the sizing of the hydroponic unit is a critical aspect, because ideally it needs to assimilate the nutrients provided by the fish unit directly or via sludge mineralization (e.g. extracting nutrients from the sludge and providing it to the plants in a soluble form). Indeed, both the plant area size and environmental conditions (e.g. surface, leaf area index, relative humidity, solar radiation, etc.) determine the amount of water that can be evapotranspired and are the main factors determining the rate of RAS water replacement. The water sent from the RAS to the hydroponic unit is consequently replaced by clean water which reduces nutrient concentrations and thus improves water quality (Monsees et al. 2017a, b). The amount of water that can be replaced depends on evapotranspiration rate of plants that is controlled by net radiation, temperature, wind velocity, relative humidity, and crop species. Notably, there is a seasonal dependency, with more water evaporated in the warmer, sunnier seasons which is also when plant growth rates are highest. This approach has been suggested by Goddek et al. (2015) and Kloas et al. (2015) as an approach for improving the design of one-loop systems and better utilizing capacity to assure optimal plant growth performance. The concept has been adopted, inter alia, by ECF in Berlin, Germany, and the now bankrupt UrbanFarmers in The Hague, Netherlands.
Despite potential benefits, initial experiments with a decoupled single-loop design met with serious drawbacks. This resulted from the high amounts of additional nutrients that were needed to be added to the hydroponic loop given that the process water flowing from the RAS to the hydroponics loop is purely evapotranspiration dependent (Goddek et al. 2016; Kloas et al. 2015; Reyes Lastiri et al. 2016). Nutrients also tended to accumulate in the RAS systems when evapotranspiration rates were lower, and could reach critical levels, thus requiring periodic bleeding off of water (Goddek 2017).
Overcoming these drawbacks required the implementation of additional loops to reduce the amount of waste produced in the system (Goddek and Körner 2019). Such multi-loop systems are outlined in Fig. 8.1c and enhance the two-loop approach (8.1b) with two units that will be more closely explored in the next two subchapters as well as Chaps. 10 and 11:
-
1.
Efficient nutrient mineralization and mobilization, using a two-stage anaerobic reactor system to reduce the discharge of nutrients from the system via fish sludge
-
2.
Thermal distillation/desalination technology to concentrate the nutrient solution in the hydroponics unit in order to reduce the need for additional fertilizers
Such approaches have been partly implemented by various aquaponics producers such as the Spanish company NerBreen (Fig. 8.1) (Goddek and Keesman 2018) as well as Kikaboni AgriVentures Ltd. in Nairobi, Kenya, (van Gorcum et al. 2019) (Fig. 8.2).

Pictures of existing multi-loop system in (1) Spain (NerBreen) and (2) Kenya (Kikaboni AgriVentures Ltd.). Whereas the NerBreen System is located in a controlled environment, the Kikaboni System is using a semi-open foil-tunnel system
In terms of economic advantages (Goddek and Körner 2019; Delaide et al. 2016), optimizing growth conditions in each respective loop of decoupled aquaponics systems has inherent advantages for both plants and fish (Karimanzira et al. 2016; Kloas et al. 2015) by reducing waste discharge as well as improving nutrient recovery and supply (Goddek and Keesman 2018; Karimanzira et al. 2017; Yogev et al. 2016). In their work, Delaide et al. (2016), Goddek and Vermeulen (2018), and Woodcock (pers. Comm.) show that decoupled aquaponics systems achieve better growth performance than their respective one-loop aquaponics and hydroponics control groups. Despite this, there are various problems that still need to be resolved, including technical issues such as system scaling, parameter optimization, and engineering choices for greenhouse technologies for different regional scenarios. In the rest of this chapter, we will focus on some of the current developments to provide an overview of ongoing challenges, as well as promising developments in the field.
2 Mineralization Loop
In RAS, solid and nutrient-rich sludge must be removed from the system to maintain water quality. By adding an additional sludge recycling loop, accumulating RAS wastes can be converted into dissolved nutrients for reuse by plants rather than discarded (Emerenciano et al. 2017). Within bioreactors, microorganisms can break down this sludge into bioavailable nutrients, which can subsequently be delivered to plants (Delaide et al. 2018; Goddek et al. 2018; Monsees et al. 2017a, b). Many one-loop aquaponics systems already include aerobic (Rakocy et al. 2004) and anaerobic (Yogev et al. 2016) digesters to transform nutrients that are trapped in the fish sludge and make them bioavailable for plants. However, integrating such a system into a coupled one-loop aquaponics system has several disadvantages:
-
1.
The dilution factor for nutrient-rich effluents is much higher when discharging them to a single-loop system in relation to discharging them to the hydroponics unit only. Effectively, nutrients diluted by entering in contact with large volumes of fish rearing water.
-
2.
Fish are unnecessarily exposed to the mineralization reactor’s effluents; e.g. the effluents of anaerobic reactors can include volatile fatty acids (VFAs) and ammonia that might potentially harm the fish; such reactors also represent an additional source for potential introduction of pathogens.
-
3.
Around 90% of the nutrients trapped in the sludge can be recovered when RAS sludge is maintained at a pH of 4 (Jung and Lovitt 2011). Such a low pH is not possible when operating bioreactors at a pH around 7 (Goddek et al. 2018), which is the usual trade-off pH value within one-loop aquaponics systems.
With respect to pH, Fig. 8.3 shows the approximate pH values of the respective process water flows in a multi-loop aquaponics system (e.g. as presented in Fig. 8.1c). Figure 8.3 also shows the impact of mineralization reactors on the performance of the system as a whole, based on the anaerobic reactors proposed by Goddek et al. (2018). Such a system represents only one possible solution for treating sludge, with alternative approaches discussed in Chap. 10. The decrease in pH of the process water flowing from the RAS subsystem into the hydroponics loop as shown in Fig. 8.3 demonstrates acidification in the nutrient concentration loop (i.e. demineralized water has a pH of 7). Thus, the effluent has a lower pH than the RAS outlet, which reduces the need to adjust the pH for optimal plant growth conditions.

Approximate pH of the water within the different system components as well as the process water. The ‘~’ indicated an approximation
The two-stage reactor system works as follows:
-
In the first stage (pH around 7 to provide optimal conditions for methanogenesis; Table 8.1), the organic matter is broken down to sustain a high degree of methane production (i.e. carbon removal). Mirzoyan and Gross (2013) reported a total suspended solids reduction of around 90%, using upflow anaerobic sludge blanket reactor technology. This has the benefit that (1) biogas is harvested as a renewable energy source and (2) fewer VFAs are produced in the second stage. The sludge retention time in the first stage should be several months, before removing the accumulated nutrients in the sludge (e.g. calcium phosphate aggregation) within the second stage.
-
In the second stage, nutrients in suspended solids are effectively mobilized and become available for plant uptake. This mobilization is the most effective in a low-pH environment (Goddek et al. 2018; Jung and Lovitt 2011). Once the pH of acidic reactors is decreased, it usually remains stable; thus less pH regulation is required in the hydroponic unit.
The effluents that are rich in nutrients may require some post-treatment depending on the amount of measured total suspended solids and VFAs. However, it is important to keep in mind that ammonia can stimulate plant growth, e.g. leafy greens, when it accounts for 5–25% of the total nitrogen concentration (Jones 2005). However, fruit vegetables such as tomatoes or sweet peppers are particularly sensitive to ammonia in the nutrient solution. An aerobic post-effluent treatment or a well-aerated hydroponics sump would be required in systems growing those types of crops.
2.1 Determining Water and Nutrient Flows
For system sizing (Sect. 8.4), the amount of water flowing from the RAS system via the reactor(s) to the hydroponics unit (QMIN) needs to be known (Eq. 8.1):
where n feed is the amount of fish feed in kg, k sludge is the proportion coefficient of fish feed ending up as sludge, and π sludge is the proportion of total solids (i.e. sludge) in the sludge water flow entering the mineralization loop.
The sludge concentration can be increased by adding a gravity separation device prior to the bioreactors, directing the ‘clear’ supernatant back to the RAS system. This formula can also be used to get an input for sizing the reactor based on the hydraulic retention time (Chap. 10). Between 20 and 40% of the fish feed ends up as total suspended solids in the RAS-derived sludge (Timmons and Ebeling 2013). As an example, it has been found that tilapia sludge contains around 55% of nutrients that were added to the system via feed (Neto and Ostrensky 2013; Yavuzcan Yildiz et al. 2017) which represents a valuable resource for crop growth.
The main nutrients that can be recovered via a mineralization process are N and P. As P (one of the major components of sludge) is the most valuable macronutrient in terms of cost and availability for crop production, it should be the first element to be optimized in the aquaponic system.
The mineralization rate of the mineralization loop is calculated as follows:
where n feed is the feed input to the system (in kg); π feedis the proportion of the nutrient in the feed formulation;π sludgeis the proportion of a specific feed-derived element ending up in the sludge; and η minis the mineralization and mobilization efficiency of the reactor system.
The last step would be to determine the concentration of the respective element in the effluent of the mineralization loop:
Example 8.1
Our RAS system is fed with 10 kg of fish feed per day. We assume that 25% of the fed feed ends up as sludge. In our system, we use a Radial Flow Settler (RFS) to concentrate the sludge to 1% dry matter. Consequently, the flow from the RAS to HP via the mineralization loop is calculated as follows:
We decide to size our system on P. The P content of our feed (in most cases provided by the feed manufacturer) is 1.5% and 55% of it ends up in the sludge (Neto and Ostrensky 2013). We assume that our reactors achieve a mineralization efficiency of 90% for this element. Therefore, the grams of P transferred to the hydroponics unit each day can be determined:
The concentration of the effluent is consequently:
\( \mathrm{Nutrient}\ \mathrm{concentration}\ \left(\mathrm{mg}/\mathrm{L}\right)=\frac{74,25\mathrm{g}\times 1000}{250\mathrm{L}}=297\ \mathrm{mg}/\mathrm{L} \)
This concentration of P in the effluent in the example box above is approximately six times higher than in most hydroponics nutrient solutions. The research of Goddek et al. (2018) underpins this theoretical number, and they report that their RAS sludge contained 150 and 200 mg/L of P for two independent systems, respectively (1% TSS sludge), with a fish feed P content of 0.83% in dry matter feed for the latter (200 mg/L).
3 Distillation/Desalination Loop
In decoupled aquaponics systems, there is a one-way flow from the RAS to the hydroponics unit. In practice, plants take up water supplied by RAS, which in turn is topped up with fresh (i.e. tap or rain) water. The necessary outflow from the RAS unit is equal to the difference between the water leaving the HP system via plants (and via the distillation unit) and the water entering the hydroponics unit from the mineralization reactor, if the system includes a reactor (Fig. 8.4). A simplified summary is that the long-term water flux requirement from RAS to HP is equal to the crop water consumption by evapotranspiration and plant water storage in the plant biomass.

Scheme of water fluxes and different concentrations of nutrients in a decoupled aquaponics system, where Q, flow volume in L; ρ, nutrient concentration in mg/L; RAS, recirculating aquaculture system; MIN, mineralization reactor; DIS, distillation unit; and X, unknown/flexible flow parameter
However, in terms of mass balances, the amount of nutrients leaving the hydroponics system via the plants needs to be replaced to assure a constant equilibrium. This poses a dilemma, as the maximum tolerable nutrient concentration in RAS is much lower than what is necessary in HP. The high nutrient flows (ρ RAS × Q RAS) for HP can thus not be accomplished by the low RAS nutrient concentrations. Instead, without a distillation/desalination loop, the nutrient concentration would increase in the RAS while decreasing in the hydroponics system. A possible remedy is to discharge RAS water (and thus also nutrients) to decrease the nutrient concentration there and add fertilizer to the hydroponics nutrient solution. In terms of environmental and economic impact, this solution is less satisfying and does not serve the aim of a closed loop combined production.
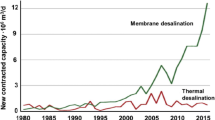
The implementation of a distillation unit as shown in Fig. 8.3 represents a potential solution for this dilemma. Such distillation technologies (e.g. thermal membrane distillation) have the potential to separate dissolved salts and nutrients from water (Shahzad et al. 2017; Subramani and Jacangelo 2015). In the context of multi-loop aquaponics systems, and as an alternative to additional fertilization and water bleed-off with corresponding extra costs, this technology could not only provide fresh water to the system but also achieve desired nutrient concentrations for the respective subsystems (Goddek and Keesman 2018).
For the implementation (i.e. sizing) of such a distillation unit, simple mass balance equations can be used. The remaining system, however, must be sized beforehand (either via rules of thumb or via mass balance equations; see Sect. 8.5), because the nutrients that enter the system should be in equilibrium with the bioavailable nutrients taken up by the crop (Note: the sweet spot of decoupled systems is its flexibility. Consequently, one can also oversize the hydroponics part of the system although that will necessitate the use of more fertilizer). The easiest way to estimate nutrient uptake is to use the assumption that nutrients are taken up/absorbed much the same as dissolved ions in irrigation water (i.e. no element-specific chemical, biological or physical resistances). Consequently, to maintain equilibrium, all nutrients taken up by the crop as contained in the nutrient solution need to be added back to the hydroponics system (Eq. 8.4).
where ϕ RAS is the nutrient flow from the RAS system to the hydroponics system, ϕ MIN is the nutrient flow from the mineralization unit to the hydroponics system and ϕ HP is the nutrient plant uptake. For this equation, it is assumed that the distillation system has an efficiency of close to 100%. Thus, Q DIS goes back to the hydroponics subsystem.
Consequently:
where Q is the flow volume in L, and ρis the nutrient concentration in mg/L.
As stated above, the flow from RAS to the hydroponics unit is the difference of the sum of the water flows leaving the hydroponics system (i.e. Q HP + Q X) and the inflow from the bioreactor (Q MIN), i.e. Q RAS = Q HP + Q X − Q MIN, which leads us to the following equation:
The targeted variable is the distillation flow (Q X) that is required to maintain the nutrient concentration equilibrium in the hydroponics system. For this, Eq. 8.6 is solved for Q Xin the following steps:
Note that the distillation flow Q Xis highly dynamic and depends on the evapotranspiration rate of the plants, which is climate-dependent. The dynamic outcome, however, can be used for sizing the distillation unit. To calculate the required inflow into the distillation unit, the following formula can be used:
where Q is the flow volume in L and η the demineralization efficiency of the used device (in %).
Distillation technology can hence drastically reduce the water and environmental (i.e. fertilizer usage) footprint of multi-loop aquaponics systems. However, aquaponics systems become even more complex when considering their implementation. Even though this additional loop might not make any sense for small-scale systems, it has the potential to take larger commercial systems to a new level. Yet, one has to consider that thermal distillation technology requires high amounts of thermal energy and might not be economically reasonable everywhere. Regions with high global solar radiation levels or geothermal energy sources might be the most suitable for this technology. The economical sustainability of such systems is consequently also location dependent.
Another point to bear in mind is the high temperature of distilled water and brine from the distillation unit. Depending on the environmental conditions and the fish species used, the hot distillation water could be used to heat up the RAS water; the brine, however, needs to cool down before re-entering the HP subsystem.
4 Sizing Multi-loop Systems
Sizing an aquaponics system requires balancing the nutrient input and -output. Here, we basically apply the same principle as sizing a one-loop system. Yet, this approach is a bit more complicated, but will be fully illustrated with the aid of an example.
Figure 8.5 illustrates the mass balance diagram for our system approach. In the optimal situation, the system has only one input and output. However, in practice, one will have to add additional nutrients to the hydroponics part to optimize plant growth. This model can be used to size the system, e.g. based on phosphorus, which is a non-renewable resource (Chap. 2). The input to the system (mfeed) is the fraction of a nutrient that the fish excrete in a dissolved form. The remainder accumulates in the fish as biomass or ends up as sludge (see previous section). The output is the plant nutrient uptake. Determining nutrient uptake of plants depends on many factors and is very complex; the easiest way to give a rough estimate is to consider plant respiration as the main driver of nutrient uptake (Goddek and Körner 2019).

Scheme that shows the mass balance within a four-loop aquaponics system; where m feed are the dissolved nutrients added to the system via feed. Add labels: Q DIS - Q X to distillate returned to HP; ‘sludge’ for nutrients entering reactor
Evapotranspiration rate is highly climate dependent and is either directly or indirectly influenced by absorbed shortwave radiation, relative humidity, temperature, and CO2 concentration. Due to the high complexity of a multi-loop system, we assume that the plants are located in a climate-controlled greenhouse, and therefore we only need to consider global radiation as the dynamic variable determining how much shortwave radiation is absorbed. In other words, we first need to determine how much of the added nutrients become available for the plants, and then determine how much the plants actually take up.
4.1 Feed Input
The fish feed rate depends on the total biomass in the system and the feed conversion ratio (FCR). Timmons and Ebeling (2013) provide a simple approach for determining fish growth rates for different fish species. However, we recommend taking industrial data to determine the biomass more precisely. Lupatsch and Kissil (1998) (Eq. 8.10) provide a general growth formula, for which Goddek and Körner (2019) determined the growth coefficients by curve fitting using the mathematical software environment MATLAB (internal function ‘fitnlm’) with empirical data for Nile tilapia (Oreochromis niloticus). Additional initial and final weights, water temperature of the system, and the output for the species-specific growth coefficients can be found in Table 8.2. Inserting these parameters into Eq. 8.10 gives us the weight at a specific day for this fish species.
where W t (g) is the fish weight at a specific time (days), W 0 (g) is the initial fish weight, T is the water temperature (in °C), αw βw and γw are species-specific growth coefficients (no units), and t is the time in days.
Based on the output of the equation above, we were able to determine how much feed the fish will require per growth stage. Most of the times, the feed rate (X% of the body weight) or FCR is mentioned by the species-specific feed manufacturer. However, Timmons and Ebeling (2013) provide a rough guideline for FCR for tilapia: 0.7–0.9 for tilapia that weigh less than 100 g and 1.2–1.3 for tilapia that weigh more than 100 g. This is done via the following equation.
where FCR is the feed conversion ratio, WG t is the weight gain (per day), and m fish is the amount of fish in the fish tank.
The weight gain (WG) per day can be determined with Eq. 8.10 by subtracting the weight of, e.g. day 10 from the weight of day 11. This can be done for each tank. Figure 8.6 shows the fish feed input to the system for tilapia using the equations above. The average feed input per day after the system is totally cycled is 165 kg.

Example of biomass balance for tilapia reared in 13 tanks in cohorts with a total volume (including biofilter and sump) of 482.000 L at a max. Total biomass of 80 t for a period of 2 years including start-up phase with average fish weight (a) (each line represents one tank/cohort) and the daily total feed rate (b) (data taken from Goddek and Körner 2019)
4.2 Nutrient Availability
Neto and Ostrensky (2013) report a soluble N excretion of 33% and a soluble P excretion of 17% of feed input when rearing Nile tilapia (Oreochromis niloticus, L.). These are the nutrients that finally accumulate in the RAS system and can be taken up by the plants.
4.3 Plant Uptake
Table 8.3 gives an overview of the crop-specific evapotranspiration (ETc) rates that are linked to global radiation. One mm of ET per square meter equals 1 L. For simple sizing, one should take the annual daily average (see next section).
4.4 Balancing the Subsystems
Balancing the loops is necessary for sizing the system. The input should be equal to the output (Fig. 8.5). In a decoupled aquaponics system incorporating a bioreactor unit, we have two nutrient inflow streams: (1) the fraction of the feed that is excreted to the RAS system in a soluble form and (2) the fraction of the nutrients in the fish sludge that the bioreactor(s) manage to mineralize and mobilize. The major outflow stream (apart from the periodic removal of demineralized sludge) of nutrients is the nutrient uptake of the plants. The differential Eq. 8.12. expresses this balance:
where \( \underline {n_{\mathrm{feed}}} \) is the average feed (in kg) entering the RAS system, π feedis the proportion of the nutrient in the feed formulation, π sludge is the proportion of a specific feed-derived element ending up in the sludge, and η min is the mineralization and mobilization efficiency of the reactor system, \( \underline {m_{\mathrm{feed}}} \) is the average amount of a nutrient that the fish defecate in a dissolved form, \( \underline {Q_{\mathrm{HP}}} \) is the average total evapotranspiration, and ρ HPis the target (i.e. optimal) nutrient concentration for a specific nutrient in the hydroponic subsystem.
However, to be able to determine the required area, there are two variables that need to be redefined in order to solve this equation. Equation 8.14 shows how to calculate the soluble nutrient excretion. In Eq. 8.15, we show that the average total evapotranspiration is a product of the area and the plant-specific evapotranspiration rate (here shown as an average) per m2.
where η excr represents the fraction of the nutrient excreted by the fish in a soluble form.
where \( \underline {Q_{\mathrm{HP}}} \) represents the average total evapotranspiration (in L), A the area, and \( \underline {ET_{\mathrm{c}}} \) the average crop-specific evapotranspiration in mm/m2 (i.e. L/m2).
Solving Eq. 8.13 by incorporating Eqs. 8.14 and 8.15 to find A, we are able to calculate the required plant area with respect to the average feed input (Eq. 8.15).
Example 8.2
For this example, we want to size (i.e. balance) the system with respect to P. We assume that the RAS component of our system requires an average daily feed input of 150 kg. The manufacturer reports the P content of the fish feed to be 1%. We estimate the P ending up in the sludge to be 55% and the P that fish excrete in a soluble form to be 17%. The bioreactors perform quite well and mineralize around 85% of the P.
On the output side, we calculated the average crop-specific evapotranspiration rate for lettuce (by, e.g. using the FAO Penman-Monteith equation). At our location, it is around 1.3 mm/day (i.e. 1.3 L/day). The optimal P composition of the nutrient solution is reported to be 50 mg/L (Resh 2013). Finding the area of plant cultivation needed to uptake the P produced by the system is then solved by:
The example above shows that the majority of the P in the hydroponics unit originates from the bioreactors. Thus, implementation of a bioreactor within a decoupled system has a very high impact on P sustainability. By contrast, in order to size simple one-loop aquaponics systems, a rule of thumb is usually applied. For leafy plants approx. 40–50 g and for fruity plants approx. 50–80 g of feed is required per m2 cultivation area (FAO 2014). When looking at the feed input in the given example above = 150 kg, and dividing it by 45 (the average of the leafy plant approximation), the proposed cultivation area is around 3750 m2. Leaving out the sludge mineralization, our example would suggest a cultivation area of 3333 m2 when sizing the system on P.
4.5 Role of the Distillation Unit
The role of the distillation unit is to keep the nutrient concentration of the RAS system and the hydroponics system at their respective desired levels. Since nutrient accumulation and the corresponding specific nutrient density are dynamic in RAS systems (i.e. depending on the ET c rates) that depend on the Q HP and Q X flow (Fig. 8.5), the size of the distillation unit cannot be determined using a differential equation. Thus, a time series model is required to determine the nutrient concentration in the RAS over time. The nutrient concentration at a specific time is necessary to be able to execute mass balance equations within the system (Sect. 8.3).
For the system to be balanced (i.e. input = output), we can give a general guideline on the required capacity of such a distillation unit. The objective is to avoid nutrient accumulation in the RAS system. Figure 8.7a, b shows the impact of distillation flows on the hydroponics and RAS nutrient solution without a mineralization loop in two different latitudes. Both systems have the same feed input (in average 158.6 kg day−1; see Fig. 8.6). However, by taking the environmental conditions and climate-adjusted greenhouses into account, the necessary and optimal hydroponic area differs between geographical locations (see Chap. 11). Hydroponic systems with low potential evaporation rates, as are common in locations at high latitudes (i.e. far from the equator) would need larger cultivation areas than places closer to the equator. At the same time, a higher annual variation in irradiation and thus transpiration is common in these regions, thus a higher demand on seasonal variability on water and nutrients is present (see Fig. 8.7). In greenhouse cultivation, however, supplementary lighting may be necessary, and in countries such as Norway, vegetable cultivation without supplementary lighting hardly takes place. In addition, the total crop leaf surface makes a difference; crops with a high leaf area per unit ground area (i.e. leaf area index) transpire more than crops with smaller leaf areas, and a distinct difference can be seen between tomato and lettuce crops. All of these factors need to be considered when planning and sizing the aquaponic system.

Simulations comparing NO3-N concentration in the RAS water system on the impact of distillation flows (no, solid line; 5000 L h-1, dashed line) on hydroponics (yellow, ---) and RAS (blue, ---) nutrient solution concentrations in (a) Namibia and (b) the Netherlands, i.e. in low and high latitudes (Namibia 22.6°S and the Netherlands, 52.1°N, respectively) within a 36-month period (including the system run-up phase) using local climate data and climate-adjusted greenhouses as model input
In the following we provide an overview of the optimized hydroponic area size for the above described aquaponics systems: The cultivation area for monocultures simulated with scenarios in steps of 250 m2 to find the fitting area of either lettuce or tomatoes in order to balance the system appropriately was without supplementary lighting (for lettuce or tomato, respectively):
-
17.000 m2 or 11.750 m2 for Faroe Islands
-
15.500 m2 or 11.000 m2 for the Netherlands
-
8750 m2 or 6500 m2 for Namibia
Even though the size of the systems differs, the average annual nutrient uptake is similar. However, when integrating a digester system, we have to take the additional nutrient source into consideration (Fig. 8.1c). Changing one component inevitably leads to imbalances of the system, yet the system must aim to provide optimal nutrients to both RAS and HP. For example, NO3-N in RAS must be below a certain threshold <200 mg L−1 for, e.g. tilapia, while PO4-P in HP should be as close as possible to the recommended concentration of 50 mg L−1 for good-quality plant cultivation. Thus, simulation studies help determine sizing of components in a decoupled closed multi-loop aquaponics system in order to achieve optimal nutrient supplies for both fish and plants. For that purpose, Goddek and Körner (2019) created a numeric aquaponics simulator.
However, planning an aquaponic system involves some basic system understanding in order to reach a balance that minimizes the unwanted peaks in nutrient demand and supply. Since the driving force for nutrient dynamics is the evapotranspiration of the crop (ETc in the HP system), that is largely driven by microclimate and absorbed light. In a perfectly balanced system, this would be a fully automated and controlled (see Sect. 8.5 Monitoring and Control) environment with 24-h lighting. Plants need a certain dark period of about 4–6 h, so the best-balanced system is realistically to carry out aquaponics in closed plant factories solely with artificial light sources. This, however, demands high electrical input and investment costs and is only feasible with very high product prices. Therefore, we recommend greenhouse production with supplementary lighting (if necessary and if it pays off) as a practical and economically feasible way of building an aquaponic unit. Placing both plants and fish in the same physical construction results in additional synergies including reduced heating and increased plant growth through elevated CO2 (Körner et al. 2017).
In addition to these technical issues, plant cultivation procedures (the practical horticultural part of the system) have to be adjusted to the needs of aquaponics such that there is a constant crop nutrient demand (assuming same climate and light) as shown in Table 8.3. Cultivation of lettuce and other leafy greens are carried out continuously (Körner et al. 2018), while larger crops, like fruit vegetables such as tomato, cucumber, or sweet pepper, are usually sown in winter, and the first harvest is often in late winter/early spring followed by removal of plants and another crop sown for harvest in winter again. Without interplanting, i.e. either various crop types in the same system or batches of fruit vegetables planted throughout the year in order to sustain nutrient demand, periods of low nutrient demand and high nutrient levels will occur. Based on Goddek and Körner (2019), we show the variation of NO3-N in RAS for tomato (often not adjusted in aquaponics) and lettuce when no supplementary lighting is used for three climate zones (Faroe Islands, the Netherlands, and Namibia) (Fig. 8.8). System balance is achievable by increasing the daily light integral (i.e. sum of mol light received during a 24-h period) with dynamic supplementary lighting control (Körner et al. 2006).

NO3-N in RAS combined with HP growing tomato or lettuce in three climate zones and decreasing latitudes (Faroe Islands 62.0°N, the Netherlands 52.1°N, Namibia 22.6°S) with optimized area for hydroponics (see above) in a 36-month simulation using local climate data and climate-adjusted greenhouses as model input
Applying distillation/desalination technologies can contribute to significant reductions in nutrient levels in the RAS while adjusting levels in the HP system closer to optima, i.e. the unit concentrates nutrients to levels required by plants. Figure 8.9 illustrates the effect of a desalination unit on RAS NO3-N concentration when applying between 0 and 5000 L h−1 and system−1. It is obvious that with increasing desalination flux, the NO3-N concentration in the RAS system is decreasing. The unit, however, is controlled by the demand of PO4 in the HP system. Peaks need to be avoided and, as stated above, this can be achieved by creating a stable climatic environment with dynamic light controls. It is obvious that in climate regions with fewer annual differences in solar radiation, there is less variation in ETc and the complete system is more stable. Installing lamps and keeping a daily light integral of at least 10 mol m−2 can compensate for seasonal variations. Interplanting and mixed crop production help level the peak resulting from the traditional tomato cultivation protocol with young plants in winter when both climate (low radiation) and cultivation (small plants, low potential ETc) contribute to nutrient accumulation.

NO3-N in RAS combined with HP with tomato (right) or lettuce (left) with desalination between 0 and 5000 L h − 1 supply in three climate zones and decreasing latitudes (Faroe Islands 62.0°N, the Netherlands 52.1°N, Namibia 22.6°S) with adjusted area for HP (see above) in a 36- month simulation using local climate data and climate-adjusted greenhouses as model input
5 Monitoring and Control
In classical feedback control, like PI or PID (Proportional-Integral-Derivative) control, the controlled variables (CV) are directly measured, compared with a setpoint, and subsequently fed back to the process via a feedback control law.
In Fig. 8.10, the signals, without the time argument, are denoted by a small letter, where y is the controlled variable (CV) which is compared with the reference (setpoint) signal r. The tracking error ε (i.e. r − y) is fed into the controller, either in hardware or software, from which the control input u, also known as the manipulated variable (MV), is generated. The input u directly affects the process (P) from which an output (y) results. The sampled output is subsequently compared with r, which closes the loop. In practice, this loop continues until the controller is switch off. There exists extensive literature on feedback control (Doyle et al. 1992; Morris 2001; Ogata 2010), and this has been a subject of research for many years, starting with the works of Bode (1930) and Nyquist (1932).

Feedback control with controller (C) and process (P). r reference signal, eps tracking error, u input signal, y output sigma
In RAS, typical CVs are temperature, pH, and dissolved oxygen (DO) concentration, for which reliable sensors exist. Consequently, feedback control of these water quality parameters can be easily realized. However, in practice, most often, the input and output signals are disturbed by noise processes, such as unknown random inputs and measurement noise. Moreover, the overall process (P) may change over time as a result of growth, maturation, senescence, etc. Fish feed is another input into the RAS and its effect on fish growth cannot be directly seen or measured. For these parameters, model-based controllers (e.g. feedforward, model predictive, and optimal control) are typically introduced to predict the response of a change in the control input. However, fish feed is commonly added on the basis of values found in tables or recipes, but this rule-based control may need some adjustment in real practice to act as a feedback controller. Fish behaviours in RAS are a classical feedback control measure as fish react physiologically to environmental changes with variations in movement, location, receptiveness to feed, etc.
Hydroponic production usually takes place in protected environments such as greenhouses or plant factories where both the root and aerial environment need to be controlled. On-off controllers that predictively model optimal aerial environments have been proven superior in experimental research, but commercialization has been slow, whereas feedback controllers are standard in most climate-controlled greenhouses. However, the actuator varies with the type of controller with heating valves and vents typically feedback-controlled but lighting usually having an ON-OFF mechanism and only a few being dimmable. Controllers that rely on sensor or data input can respond to fast growth in a protected environment and result in high-quality produce with high market prices that improves its cost benefits. Many commercial greenhouses still have the classical centrally located sensor hanging 1–2 m above the crop and covering several hundred square meters is still in use, but multiple wireless sensors covering smaller areas are being introduced although much of the detailed data cannot be used because rather large climatic zones are controlled by the same actuators. Advances in sensor technology (e.g. microclimate temperature sensors, image processors, real-time gas-exchange or chlorophyll fluorescence measurements) connected to modelling software could use decision-support systems and become automated control systems.
In typical bioreactor systems, temperature, pH, dissolved oxygen in aerated systems, and gas fluxes in anaerobic systems are continuously measured and adjusted with available temperature, pH, and dissolved oxygen controllers. In addition to this, both hydraulic (HRT) and sludge retention (SRT) times are also frequently set by controlling (waste)water flows and biomass waste flows, respectively.
6 Economic Impact
Technologies that generate less profit, but are better for the environment usually only get implemented when the operators either receive an incentive in the form of subsidies or policies force them to do so. In the case of one-loop aquaponics systems, the appeal lies in the novel technology and the system’s approach to sustainable resource use rather than its economic potential. However, recent publications provide evidence for production gains: leafy greens grow better in decoupled environments than in sterile hydroponic systems (Delaide et al. 2016; Goddek and Vermeulen 2018) and lettuce in decoupled aquaponics systems had a growth advantage of approximately 40% compared to state-of-the-art hydroponic approaches.
Even though higher growth rates can be expected, multi-loop aquaponics systems are still far more complex than hydroponics systems and significant initial investments are required for implementation. Most geographic locations require a high-tech greenhouse to control environmental conditions (i.e. a relative humidity of 80%, constant temperatures of around 20°C). Renewable energy sources can be used for cooling and heating, but currently such systems are only profitable when setting up on a large scale (i.e. > 1 ha) where good market conditions prevail.
7 Environmental Impact
Based on Example 8.2, there is evidence that treating sludge in digesters can have a beneficial impact on nutrient reutilization, especially phosphorus. Bioreactor systems, such as a sequential two-stage UASB reactor system, can increase the phosphorus recycling efficiency up to 300% (Chap. 10). Previously, in Chap. 2, we discussed the phosphorus paradox in relation to both phosphate scarcity and problems with eutrophication. Bioreactors have significant advantages for increased nutrient recovery from sludge, thus helping to close the nutrient cycling loop within aquaponics systems. However, further research is needed to refine such systems to optimize the bioavailability of specific nutrients. Figures 8.11, 8.12, and 8.13 show the input, output, and waste streams of stand-alone aquaculture and hydroponics systems compared with a decoupled aquaponics system. It can be seen that the decoupled approach constitutes a promising agricultural concept for a waste reduction and recycling system.

Input, output, and loss streams in a stand-alone hydroponic system

Input, output, and loss streams in a stand-alone aquaculture system

Input, output, and loss streams in a decoupled multi-loop aquaponics system comprising an anaerobic reactor system
References
Alvarez R, Lidén G (2008) The effect of temperature variation on biomethanation at high altitude. Bioresour Technol 99:7278–7284. https://doi.org/10.1016/j.biortech.2007.12.055
Bode HW (1930) A method of impedance correction. Bell Syst Tech J 9:794–835. https://doi.org/10.1002/j.1538-7305.1930.tb02326.x
Coghlan SM, Ringler NH (2005) Temperature-dependent effects of rainbow trout on growth of Atlantic Salmon Parr. J Great Lakes Res 31:386–396. https://doi.org/10.1016/S0380-1330(05)70270-7
Dalsgaard J, Lund I, Thorarinsdottir R, Drengstig A, Arvonen K, Pedersen PB (2013) Farming different species in RAS in Nordic countries: current status and future perspectives. Aquac Eng 53:2–13
Davidson J, Good C, Welsh C, Summerfelt ST (2011) Abnormal swimming behavior and increased deformities in rainbow trout Oncorhynchus mykiss cultured in low exchange water recirculating aquaculture systems. Aquac Eng 45:109–117
de Lemos Chernicharo CA (2007) Anaerobic reactors, 4th edn. IWA Publishing, New Delhi
Delaide B, Goddek S, Gott J, Soyeurt H, Jijakli M (2016) Lettuce (Lactuca sativa L. var. Sucrine) growth performance in complemented aquaponic solution outperforms hydroponics. Water 8:467. https://doi.org/10.3390/w8100467
Delaide B, Goddek S, Keesman KJ, Jijakli MH (2018) Biotechnologie, agronomie, société et environnement = Biotechnology, agronomy, society and environment: BASE. https://popups.uliege.be:443/1780-4507 22, 12
Doyle JC, Francis BA, Tannenbaum A (1992) Feedback control theory. Macmillan Pub. Co
El-Sayed A-FM (2006) Tilapia culture. CABI Publishing, Oxfordshire
Emerenciano M, Carneiro P, Lapa M, Lapa K, Delaide B, Goddek S (2017) Mineralizacão de sólidos. Aquac Bras: 21–26
FAO (2005) Cultured aquatic species information programme. Oncorhynchus mykiss. [WWW Document]. FAO Fish. Aquac. Dep. [online]. URL http://www.fao.org/fishery/culturedspecies/Oncorhynchus_mykiss/en. Accessed 21 Sep 2015
FAO (2014) Small-scale aquaponic food production: integrated fish and plant farming. FAO, Rome
Goddek S (2017) Opportunities and challenges of multi-loop aquaponic systems. Wageningen University, Wageningen. https://doi.org/10.18174/412236
Goddek S, Keesman KJ (2018) The necessity of desalination technology for designing and sizing multi-loop aquaponics systems. Desalination 428:76–85. https://doi.org/10.1016/j.desal.2017.11.024
Goddek S, Körner O (2019) A fully integrated simulation model of multi-loop aquaponics: a case study for system sizing in different environments. Agric Syst 171:143–154
Goddek S, Vermeulen T (2018) Comparison of Lactuca sativa growth performance in conventional and RAS-based hydroponic systems. Aquac Int 26:1–10. https://doi.org/10.1007/s10499-018-0293-8
Goddek S, Delaide B, Mankasingh U, Ragnarsdottir K, Jijakli H, Thorarinsdottir R (2015) Challenges of sustainable and commercial aquaponics. Sustainability 7:4199–4224. https://doi.org/10.3390/su7044199
Goddek S, Espinal C, Delaide B, Schmautz Z, Jijakli H (2016) Navigating towards decoupled Aquaponic systems (DAPS): a system dynamics design approach. Water 8:7
Goddek S, Delaide BPL, Joyce A, Wuertz S, Jijakli MH, Gross A, Eding EH, Bläser I, Reuter M, Keizer LCP, Morgenstern R, Körner O, Verreth J, Keesman KJ (2018) Nutrient mineralization and organic matter reduction performance of RAS-based sludge in sequential UASB-EGSB reactors. Aquac Eng 83:10–19. https://doi.org/10.1016/J.AQUAENG.2018.07.003
Jones BJ (2005) Hydroponics – a practical guide for the soilless grower, 2nd edn. CRC Press, Boca Raton
Jung IS, Lovitt RW (2011) Leaching techniques to remove metals and potentially hazardous nutrients from trout farm sludge. Water Res 45:5977–5986. https://doi.org/10.1016/j.watres.2011.08.062
Karimanzira D, Keesman KJ, Kloas W, Baganz D, Rauschenbach T (2016) Dynamic modeling of the INAPRO aquaponic system. Aquac Eng 75:29–45. https://doi.org/10.1016/j.aquaeng.2016.10.004
Karimanzira D, Keesman K, Kloas W, Baganz D, Rauschenbach T (2017) Efficient and economical way of operating a recirculation aquaculture system in an aquaponics farm. Aquac Econ Manag 21:470–486. https://doi.org/10.1080/13657305.2016.1259368
Kloas W, Groß R, Baganz D, Graupner J, Monsees H, Schmidt U, Staaks G, Suhl J, Tschirner M, Wittstock B, Wuertz S, Zikova A, Rennert B (2015) A new concept for aquaponic systems to improve sustainability, increase productivity, and reduce environmental impacts. Aquac Environ Interact 7:179–192. https://doi.org/10.3354/aei00146
Körner O, Andreassen AU, Aaslyng JM (2006) Simulating dynamic control of supplementary lighting. Acta Hortic 711:151–156. https://doi.org/10.17660/ActaHortic.2006.711.17
Körner O, Gutzmann E, Kledal PR (2017) A dynamic model simulating the symbiotic effects in aquaponic systems. Acta Hortic 1170:309–316. https://doi.org/10.17660/ActaHortic.2017.1170.37
Körner O, Pedersen JS, Jaegerholm J (2018) Simulating lettuce production in multi layer moving gutter systems. Acta Hortic 1227:283–290
Lupatsch I, Kissil GW (1998) Predicting aquaculture waste from gilthead seabream (Sparus aurata) culture using a nutritional approach. Aquat Living Resour 11:265–268. https://doi.org/10.1016/S0990-7440(98)80010-7
Mirzoyan N, Gross A (2013) Use of UASB reactors for brackish aquaculture sludge digestion under different conditions. Water Res 47:2843–2850. https://doi.org/10.1016/j.watres.2013.02.050
Monsees H, Keitel J, Paul M, Kloas W, Wuertz S (2017a) Potential of aquacultural sludge treatment for aquaponics: evaluation of nutrient mobilization under aerobic and anaerobic conditions. Aquac Environ Interact 9:9–18. https://doi.org/10.3354/aei00205
Monsees H, Kloas W, Wuertz S, Cao X, Zhang L, Liu X (2017b) Decoupled systems on trial: eliminating bottlenecks to improve aquaponic processes. PLoS One 12:e0183056. https://doi.org/10.1371/journal.pone.0183056
Morris KA (2001) Introduction to feedback control. Harcourt/Academic Press, San Diego
Neto RM, Ostrensky A (2013) Nutrient load estimation in the waste of Nile tilapia Oreochromis niloticus (L.) reared in cages in tropical climate conditions. Aquac Res 46:1309–1322. https://doi.org/10.1111/are.12280
Nyquist H (1932) Regeneration theory. Bell Syst Tech J 11:126–147. https://doi.org/10.1002/j.1538-7305.1932.tb02344.x
Ogata K (2010) Modern control engineering, 5th edn. Pearson, Delhi
Rakocy JE, Shultz RC, Bailey DS, Thoman ES (2004) Aquaponic production of tilapia and basil: comparing a batch and staggered cropping system. Acta Hortic 648:63–69
Resh HM (2002) Hydroponic tomatoes. CRC Press, Boca Raton
Resh HM (2012) Hydroponic food production: a definitive guidebook for the advanced home gardener and the commercial hydroponic grower. CRC Press, Boca Raton
Resh HM (2013) Hydroponic food production: a definite guidebook for the advanced home gardener and the commercial hydroponic grower, 7th edn. CRC Press, Hoboken
Reyes Lastiri D, Slinkert T, Cappon HJ, Baganz D, Staaks G, Keesman KJ (2016) Model of an aquaponic system for minimised water, energy and nitrogen requirements. Water Sci Technol. wst2016127 74:30–37. https://doi.org/10.2166/wst.2016.127
Ross LG (2000) Environmental physiology and energetics. In: McAndrew BJ (ed) Tilapias: biology and exploitation. Springer, Dordrecht, pp 89–128
Schrader KK, Davidson JW, Summerfelt ST (2013) Evaluation of the impact of nitrate-nitrogen levels in recirculating aquaculture systems on concentrations of the off-flavor compounds geosmin and 2-methylisoborneol in water and rainbow trout (Oncorhynchus mykiss). Aquac Eng 57:126–130. https://doi.org/10.1016/j.aquaeng.2013.07.002
Shahzad MW, Burhan M, Ang L, Ng KC (2017) Energy-water-environment nexus underpinning future desalination sustainability. Desalination 413:52–64. https://doi.org/10.1016/j.desal.2017.03.009
Sonneveld C, Voogt W (2009) Nutrient management in substrate systems. In: Plant nutrition of greenhouse crops. Springer, Dordrecht, pp 277–312. https://doi.org/10.1007/978-90-481-2532-6_13
Subramani A, Jacangelo JG (2015) Emerging desalination technologies for water treatment: a critical review. Water Res 75:164–187. https://doi.org/10.1016/j.watres.2015.02.032
Timmons MB, Ebeling JM (2013) Recirculating aquaculture, 3rd edn. Ithaca Publishing Company LLC, Ithaca
van Gorcum B, Goddek S, Keesman KJ (2019) Gaining market insights for aquaponically produced vegetables in Kenya. Aquac Int:1–7. https://springerlink.fh-diploma.de/article/10.1007/s10499-019-00379-1
Yavuzcan Yildiz H, Robaina L, Pirhonen J, Mente E, Domínguez D, Parisi G (2017) Fish welfare in aquaponic systems: its relation to water quality with an emphasis on feed and faeces—a review. Water 9:13. https://doi.org/10.3390/w9010013
Yogev U, Barnes A, Gross A (2016) Nutrients and energy balance analysis for a conceptual model of a three loops off grid. Aquaponics Water 8:589. https://doi.org/10.3390/W8120589
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2019 The Author(s)
About this chapter

Cite this chapter
Goddek, S. et al. (2019). Decoupled Aquaponics Systems. In: Goddek, S., Joyce, A., Kotzen, B., Burnell, G.M. (eds) Aquaponics Food Production Systems. Springer, Cham. https://doi.org/10.1007/978-3-030-15943-6_8
Download citation
DOI: https://doi.org/10.1007/978-3-030-15943-6_8
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-15942-9
Online ISBN: 978-3-030-15943-6
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)