
Abstract
Multi-layer thick-walled cylinder is a common supporting structure in engineering, which is widely used in various engineering fields. Considering the complex boundary conditions and the different interlayer constraints, it is difficult to solve the theoretical solution of multi-layer thick walled cylinder. In this paper, the general solution expressions of displacement and stress of multi-layer thick-walled cylinder are derived in Hamiltonian mechanics system. The complex boundary conditions are transformed into the form of algebraic sum by Fourier series expansion, and the complex boundary problems are solved by superimposing the special solutions of each order expansion term. At the same time, according to the characteristics of different interlayer constraints, the corresponding conditions of interlayer continuous smooth are proposed. Combined with the boundary conditions of thick-walled cylinder, the linear equations with undetermined coefficients are established. By solving the equations, the mechanical problems of multi-layer thick-walled cylinder are finally solved. By comparing the mechanical responses of multi-layer thick-walled cylinder under different constraint conditions, it is concluded that the overall mechanical performance of the tight interlayer connection is better, and the circumfluence stress component is more prominent than other stress components. Finally, the influence of lateral pressure coefficient and elastic modulus ratio on the circumferential stress of multi-layer thick-walled cylinder is discussed. These research results provide the necessary theoretical basis for solving the mechanical problems of multi-layer thick-walled cylinders.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others

Keywords
- Multi-layer thick-walled cylinder
- Hamiltonian mechanics
- Smooth interlayer contact
- Tight interlayer connection
- Complex boundary conditions
1 Introduction
Thick-walled cylinder is a common engineering structure, which is widely used in mining, hydropower, chemical, military and other fields [1]. Thick-walled concrete cylinder is often used in mine engineering to ensure that the wellbore is still in elastic state under large load conditions. However, when the thickness of the wellbore is already large, simply relying on increasing the thickness of the wellbore will not only increase the time and labor cost, but also fail to significantly improve the elastic ultimate bearing capacity of the wellbore [2, 3]. It is a common economic and reasonable method to adopt multi-layer composite cylinder, which can effectively reduce the wall thickness and improve the ultimate bearing capacity of the structure [4].
On the basis of considering the different tensile and compression elastic modulus of the material, Wang Su et al. [5] established the stress expression of double-layer thick-walled cylinder under uniform internal pressure. The elastic limit solution corresponding to the internal pressure is obtained, and the influence of the cylinder parameters on the elastic limit is discussed. Lu, A. et al. [6] discussed the optimal design method of double-layer thick-walled cylinder by using the mixed penalty function method. Under the known uniform external load conditions, the minimum wall thickness of the cylinder, and the optimum thickness ratio and the elastic modulus ratio of the inner and outer layers are calculated. The disadvantage of this method is that it can only solve the problem of multi-layer thick-walled cylinder under uniform load with the help of classical elastic mechanics solution. Qiu J et al. [7] proposed an analytical method to solve the pressure and stress between multiple contact pairs by using the theory of multi-layer thick-walled cylinder, and applied it to the design of interference fit for engine crankshaft bearing. It mainly uses the finite element method to analyze the stress of the multi-layer thick-walled cylinder, which can not give the relationship expression between the variables accurately. Wu, Q. et al. [8] studied the plane strain problem of double-layer thick-walled cylinder by using the power series method of complex variable function, and obtained the analytical solution of stress of two-layer cylinder under the condition of complete contact. It is difficult to determine the complex potential function during the derivation of this method, and it needs to be recalculated for different external boundary conditions, which lacks generality. Abbas Loghman et al. [9] studied the magneto-thermo-elastic response of a double-layer thick-walled cylinder. The minimum effective stress distribution and the minimum radial displacement can be obtained by selecting the appropriate uniformity parameters under thermal-magnetic mechanical load.
With the development of modern mathematical and physical methods, Zhong [10] and Yao et al. [11] introduced the concept of symplectic geometry into Hamiltonian mechanical system, and established a new solution system of elasticity. It has shown great advantages in dealing with complex elastic mechanics problems. Zhou Jianfang et al. [12] extended the method of separating variables in Hamilton mechanics system, and applied it to the elasticity problem of non-homogeneous boundaries in polar coordinates. This method successfully solves the problem of thick-walled cylinder subjected to non-uniform hydrostatic pressure, which fully shows the superiority of Hamilton mechanical system. Based on the Hamiltonian state space method, Tseng and Tarn [13] discussed the theoretical solution of the stress field around a circular hole when the elastic plate with a hole is subjected to unidirectional tension by the method of variable separation and symplectic eigenfunction expansion. It can be seen that the symplectic elastic mechanics method has a wide application prospect in the field of basic research. It avoids the subjectivity of stress function selection, and uses rational logical derivation to solve the problem. Therefore, it is of great significance to study the theoretical solution of multi-layer thick-walled cylinder structure by symplectic elasticity in polar coordinate system.
2 Hamiltonian Mechanics in Polar Coordinates
2.1 The Mixed State Equation of Sector in Polar Coordinates
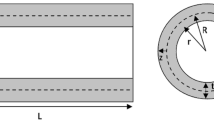
Define new variables: \(S_\rho = \rho \sigma_\rho\), \(S_\varphi = \rho \sigma_\varphi\), \(S_{\rho \varphi } = \rho \tau_{\rho \varphi }\), in a typical sector region (Fig. 1) \(R_1 \rm{ \le }\rho \rm{ \le }R_2\), \(\alpha \rm{ \le }\varphi \rm{ \le }\beta\). Then perform variable substitution \(\xi = \ln \rho\), that is \(\rho = e^\xi\); and \(\xi_1 = \ln R_1\), \(\xi_2 = \ln R_2\). In the variational principle, \(\varphi\) is simulated as time coordinates, \(\xi\) is horizontal, and the \(S_\rho\) lateral force factors is eliminated. Then the mixed energy variational principle of the Hamiltonian system under polar coordinates is obtained [14].
The mixed energy variational principle is expanded, and the sign \(\left( \cdot \right) = {\partial / {\partial \varphi }}\) is used to represent the derivative of \(\varphi\), then the Hamiltonian regular equations can be written as
The total-state vector \({{\varvec{\upsilon}}} = \left( {\begin{array}{*{20}c} {u_\rho } & {u_\varphi } & {S_{\rho \varphi } } & {S_\varphi } \\ \end{array} } \right)^T\) and operator matrix \({{\varvec{H}}}\) are introduced, and the Hamiltonian regular equations Eq. (2) become
It can be proved that the operator matrix \({{\varvec{H}}}\) is a Hamiltonian operator matrix in symplectic geometric space [15]. The Hamiltonian operator matrix is written in block form.
where
The homogeneous boundary conditions on both sides \(\xi = \xi_1\) and \(\xi = \xi_2\) are:

Mechanical problems of sector in polar coordinates
2.2 Basic Eigensolutions of Homogeneous Equations
Solving the Hamilton regular equations Eq. (2) under the homogeneous boundary condition Eq. (5), the general solution of the equation is only related to the properties of the Hamilton operator \({{\varvec{H}}}\) [16]. Therefore, the eigenvalues are \(\mu = 0, \pm i\) respectively.
When the eigenvalue \(\mu = 0\), the eigensolution and its Jordan-type eigensolution are expressed as
where \(c_1 = - \frac{1}{2} - \frac{1 - v}{2}\frac{R_2^2 \ln R_2 - R_1^2 \ln R_1 }{{R_2^2 - R_1^2 }}\); \(c_2 = - \frac{1 + v}{2}\frac{R_2^2 R_1^2 }{{R_2^2 - R_1^2 }}\ln \left( {\frac{R_2 }{{R_1 }}} \right)\).
When the eigenvalue \(\mu = \pm i\), the eigensolution and its Jordan-type eigensolution are respectively expressed as
where \(\left\{ \begin{gathered} u_\rho^1 = \frac{1}{2}\left( {1 - v} \right)\xi + \alpha \left( {1 - 3v} \right)e^{2\xi } + \beta \left( {1 + v} \right)e^{ - 2\xi } \hfill \\ u_\varphi^1 = - \frac{1}{2}\left[ {1 + v + \left( {1 - v} \right)\xi } \right] + \alpha \left( {5 + v} \right)e^{2\xi } + \beta \left( {1 + v} \right)e^{ - 2\xi } \hfill \\ S_{\rho \varphi }^1 = E\left( {\frac{1}{2} + 2\alpha e^{2\xi } - 2\beta e^{ - 2\xi } } \right) \hfill \\ S_\varphi^1 = E\left( {\frac{1}{2} + 6\alpha e^{2\xi } + 2\beta e^{ - 2\xi } } \right) \hfill \\ \end{gathered} \right.\); \(\begin{gathered} \alpha = \frac{ - 1}{{4\left( {R_1^2 + R_2^2 } \right)}} \hfill \\ \beta = - \alpha R_1^2 R_2^2 \hfill \\ \end{gathered}\).
The original problem corresponding to the eigensolution and its Jordan eigensolution is solved as follow
2.3 Special Solutions of Non-homogeneous Boundary Conditions
It is usually difficult to solve the elastic mechanics problem under complex boundary conditions. Considering that the geotechnical material is a small deformation elastic body, the principle of linear elastic superposition is applicable. Any complex boundary function can be Fourier transformed and decomposed into simple regular triangular series. Therefore, the complex boundary loads are decomposed into a series of triangular series loads, and the stress and deformation laws under each order of triangular series loads are obtained, then the original problems are solved by superposition of the calculation results of each order [17].
In polar coordinates, the boundary load is expanded by Fourier series as:
where \(a_0 = \frac{1}{\pi }\int_{ - \pi }^\pi {f\left( \varphi \right)} d\varphi\), \(a_k = \frac{1}{\pi }\int_{ - \pi }^\pi {f\left( \varphi \right)} \cos k\varphi d\varphi\), \(b_k = \frac{1}{\pi }\int_{ - \pi }^\pi {f\left( \varphi \right)} \sin k\varphi d\varphi\).
According to the property of the Hamiltonian operator matrix [18], the block operator \({{\varvec{A}}}\) has an orthogonal eigenfunction system in the Hilbert space \({{\varvec{X}}} \times {{\varvec{X}}}\), and the eigenvalue and eigenfunction system of \({{\varvec{A}}}\) can be expressed as:
Block operator \(- {{\varvec{A}}}^\ast\) has orthogonal eigenfunction systems in Hilbert space \({{\varvec{X}}} \times {{\varvec{X}}}\) and the eigenvalues and eigenfunction systems of \(- {{\varvec{A}}}^\ast\) can be expressed as:
First, a simple case is considered, that is, the inner side is homogeneous boundary and the outer side is only subjected to k-order normal cosine boundary load. The specific form is:
where, \(P_0\) is the k-order normal load coefficient, \(k\) is the coefficient of series term. Especially when \(k = 0\), the boundary load is a constant.
According to the eigenfunctions Eqs. (10) and (11) of the block operators \({{\varvec{A}}}\) and \(- {{\varvec{A}}}^\ast\), the special solution of the equation satisfying the non-homogeneous boundary conditions Eq. (12) can be written as
where Ai, Bi, Ci and Di are undetermined coefficients.
These constants in the above formula are not completely independent, they should also satisfy equation Eq. (3). Based on the relationship between these constants, the quartic equation of the eigenvalue \(\lambda\) and the coefficient \(k\) of the series term can be derived.
Solve the equation and get
Thus, the specific expression of the special solution is determined under k-order normal outward load. Then the specific values of undetermined coefficients Ai, Bi, Ci and Di are determined accosrding to the boundary condition Eq. (12).
Similarly, the inner side is considered as homogeneous boundary, while the outer side is only affected by k-order tangential sine boundary load. The specific form is as follows:
where, \(T_0\) is the k-order tangential load coefficient, \(k\) is the coefficient of series term.
By the same method, a special solution of the equation that satisfies the boundary condition Eq. (16) can be calculated. Finally, according to the principle of linear elastic superposition, the theoretical solution which satisfies the complex boundary condition of the original problem can finally be obtained.
3 Stress Analysis of Multi-layer Thick-Walled Cylinder
3.1 Problem Description
Considering the multi-layer thick-walled cylinder, the inner and outer radii of the i-th layer are \(R_i\) and \(R_{i + 1}\), respectively, and the material constants are \(E_i\) and \(v_i\). The stresses in the \(x\) and \(y\) directions on the outside of the thick-walled cylinder are \(\sigma_x\) and \(\sigma_y\) (as shown in Fig. 2). The lateral pressure coefficient \(K_0 = {{\sigma_y } / {\sigma_x }}\) is defined according to the stress values in the \(x\) and \(y\) directions. According to the theory of stress state, the force on the outside of the structure is transferred to the outermost thick-walled cylinder, and the stress boundary conditions remain unchanged along the axis of the multi-layer thick-walled cylinder. In this way, the problem can be simplified as the plane strain problem.

The plane force diagram of multi-layer thick-walled cylinder
3.2 Boundary Conditions and Continuous Smooth Conditions
The inner and outer boundary conditions of the multi-layer thick-walled cylinder can be expressed as:when \(\rho = R_1\),
when \(\rho = R_{n + 1}\),
There are usually many constraint modes between layers of multi-layer thick-walled cylinder, among which two limit modes are smooth contact and tight connection, while the others are between them. The radial stress and displacement of the interlayer are continuous with different constraint modes, but the difference is the equilibrium condition between layers. The continuous smooth conditions of the two limit modes are listed below.
-
Smooth interlayer contact
When \(\rho = R_i {,}i = 2{,} \cdots {,}n\), the continuous condition is:
At the same time, the stress equilibrium condition is:
-
Tight interlayer connection
The continuity condition between layers is the same as formula (19). The equilibrium condition of stress and displacement between layers is as follows:
According to formula (13), the general solution of displacement and stress of thick-walled cylinder of each layer can be written:
Where, the relationship between undetermined coefficients of each layer is
According to the statistical data, the undetermined coefficients of multi-layer thick-walled cylinder are 4n in total, and the continuous smooth conditions between layers are 4 × (n − 1) equations, plus the 4 equations of the inner and outer boundary conditions, a total of 4n linear equations, from which all 4n undetermined coefficients can be calculated. By substituting the solved undetermined coefficients into formula (22), the stress and displacement fields of thick-walled cylinder of each layer can be calculated.
3.3 Example
The following parameters are selected for analysis and discussion of the calculation example: the radius of double-layer thick-walled cylinder from inside to outside is \(R_1 = 3\,m\), \(R_2 = 4\,m\) and \(R_3 = 5\,m\) respectively. The outside of the thick-walled cylinder is subjected to \(\sigma_x = 7\,MPa\) and the lateral pressure coefficient is taken as \(K_0 = 0.6\). The elastic modulus of the inner and outer layers are taken as \(2E_1 = E_2 = 40\,GPa\) respectively. Poisson’s ratio is the same, take \(v_1 = v_2 = 0.25\). According to the symmetry of the force on the multi-layer thick-walled cylinder, only a quarter model is taken for study, that is, θ ∈ [0°, 90°]. There are two kinds of constraint modes between thick-walled cylinder: 1. Smooth interlayer contact, i.e. zero shear stress between layers; 2. Tight interlayer connection. The effects of two kinds of constraint modes on the stress and displacement fields of multi-layer thick-walled cylinder are compared.

Radial displacement \(u_\rho\) nephogram with different interlayer constraint modes (unit: m)

Circumferential displacement \(u_\theta\) nephogram with different interlayer constraint modes (unit: m)

Radial stress \(\sigma_\rho\) nephogram with different interlayer constraint modes (Unit: MPa)

Circumferential stress \(\sigma_\varphi\) nephogram with different interlayer constraint modes (Unit: MPa)

Shear stress \(\tau_{\rho \varphi }\) nephogram with different interlayer constraint modes (Unit: MPa)
Figures 3, Fig. 4, Fig. 5, Fig. 6 and Fig. 7 describe the nephogram of stress and displacement field under two different interlayer constraint modes. It can be seen from the comparison that the distribution patterns of radial displacement \(u_\rho\) and radial stress \(\sigma_\rho\) under two different interlayer constraints are basically the same, and smooth contact will cause the radial displacement value to be larger. However, the two constraint modes have great influence on the circumpolar displacement \(u_\varphi\), the circumpolar stress \(\sigma_\varphi\) and the shear stress \(\tau_{\rho \varphi }\). The distribution of nephogram under different constraints is completely different. The thick-walled cylinder with smooth interlayer contact is bounded by layers, and the inner and outer layers nephogram are distributed independently with similar distribution rules; while for the thick-walled cylinder with tight interlayer connection, the inner and outer nephogram are obviously continuous distribution. In terms of numerical value, the extreme value of stress and displacement under tight interlayer connection is smaller than that under smooth interlayer contact. Comprehensive analysis shows that the tight interlayer connection of multi-layer thick-walled cylinder increases the interlayer constrained force, the deformation is more coordinated, and the anti-deformation ability of thick-walled cylinder is improved. The overall mechanical properties are better than that of the thick-walled cylinder with smooth interlayer contact.
3.4 Analysis of Influencing Factors
The influences of elastic modulus \(E\), lateral pressure coefficient \(K_0\) and other factors on the stress field distribution of thick-walled cylinder are discussed below. Because the mechanical properties of the tight interlayer connection of multi-layer cylinder are better than the smooth interlayer contact, only the tight interlayer connection of multi-layer thick-walled cylinder is considered. See the above example for other calculation parameters. In order to better study the relative relationship between the stress components of thick-walled cylinders and the influencing factors, and to obtain the general rule, each stress component is firstly dimensionless. The dimensionless values \({{\sigma_\rho } / {\sigma_x }}\), \({{\sigma_\varphi } / {\sigma_x }}\) and \({{\tau_{\rho \varphi } } / {\sigma_x }}\) are defined, and the relationship between the dimensionless stress values and the elastic modulus ratio of the inner and outer cylinders \({{E_1 } / {E_2 }}\) (0.1 ~ 10) and the lateral pressure coefficient \(K_0\) (0 ~ 1) are analyzed. The variation rule of each stress field along the circumference direction of the cylinder and along the thickness direction of the cylinder is discussed.
-
Influence of elastic modulus ratio
The calculation model takes the lateral pressure coefficient \(K_0 = 0.6\), and the elastic modulus ratio \({{E_1 } / {E_2 }}\) of the inner and outer cylinders varies between (0.1 ~ 10). By comparing the nephogram of each stress component in the above example, it can be seen that the circumferential stress value is much larger than other stress components, and the extreme value of circumferential stress appears on the inner and outer circumference of the cylinder respectively. Therefore, the following focuses on the distribution of circumferential stress \(\sigma_\varphi\) along the inner and outer sides of the two-layer cylinder.

Variation of σφ/σx along the cylinder thickness 0° direction

Variation of σφ/σx along the cylinder thickness 30° direction

Variation of σφ/σx along the cylinder thickness 60° direction

Variation of σφ/σx along the cylinder thickness 90° direction
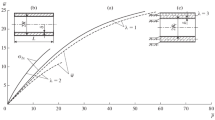
Figure 8, Fig. 9, Fig. 10 and Fig. 11 respectively describes the variation rule of circumferential stress \({{\sigma_\varphi } / {\sigma_x }}\) along different directions of the cylinder thickness with different elastic modulus ratio. It can be seen from the figure that when \(E_1 \ne E_2\), the circumferential stress is discontinuous at the interface of thick-walled cylinder, which is caused by boundary conditions; only when \(E_1 = E_2\), the circumferential stress is continuous at the interface of thick-walled cylinder. The closer the elastic modulus ratio \({{E_1 } / {E_2 }}\) approaches 1, the smaller the difference of circumferential stress on both sides of the cylinder interface is; otherwise, the greater the difference is. The closer the ratio of elastic modulus E to 1, the smaller the difference of circumferential stress on both sides of the cylinder interface is, and vice versa. It can also be seen that when the direction angle is relatively small, the circumferential stress is an increasing function along the thickness of the cylinder, that is, for the same layer of cylinder, the stress of the outer cylinder is greater than that of the inner cylinder, and the stress extreme occurs in the outer cylinder. When the direction angle is relatively large, the circumferential stress is a decreasing function along the thickness of the cylinder, and the stress extreme occurs in the inner cylinder.
-
Influence of lateral pressure coefficient \(K_0\)
The calculation model takes the elastic modulus ratio \({{E_1 } / {E_2 }} = 0.5\) of the inner and outer cylinders, and the lateral pressure coefficient \(K_0\) varies between (0 ~ 1). The distribution of circumferential stress ratio \({{\sigma_\varphi } / {\sigma_x }}\) along the thickness direction of thick wall cylinder is discussed.

Variation of σφ/σx along the cylinder thickness 0° direction

Variation of σφ/σx along the cylinder thickness 30° direction

Variation of σφ/σx along the cylinder thickness 60° direction

Variation of σφ/σx along the cylinder thickness 90° direction
Figure 12, Fig. 13, Fig. 14 and Fig. 15 respectively describes the variation rule of circumferential stress \({{\sigma_\varphi } / {\sigma_x }}\) along different directions of the cylinder thickness with different lateral pressure coefficients. It can be seen from the figures that (1) The circumferential stress is discontinuous at the interface of the multi-layer thick-walled cylinder. (2) When the direction angle is relatively small, there is an intersection point of circumferential stress in the outer cylinder corresponding to different lateral pressure coefficient \(K_0\); while when the direction angle is relatively large, the intersection point of the circumferential stress appears in the inner cylinder. (3) When the direction angle and the lateral pressure coefficient \(K_0\) are relatively small, the inside circumferential stress of the inner cylinder will be negative, while the outer cylinder will not be negative; when the direction angle is relatively large and the lateral pressure coefficient \(K_0\) is relatively small, the negative circumferential stress value will appear on the outside of the outer cylinder. (4) In the 0° direction, there is a minimum value of circumferential stress inside the inner cylinder; there is a maximum value of circumferential stress outside the outer cylinder. In the 90° direction, there is a maximum value of circumferential stress inside the inner cylinder; there is a minimum value of circumferential stress outside the outer cylinder.
4 Conclusion
-
The analytical expressions of displacement field and stress field of multi-layer thick-walled cylinder are derived by symplectic method of Hamiltonian mechanics.
-
For the multi-layer thick-walled cylinder, the mechanical properties of tight interlayer connection are better than that of smooth interlayer contact. The circumferential stress component is much larger than other stress components, which is the main cause of structural failure.
-
In the multi-layer thick-walled cylinder, as the ratio of inner and outer elastic modulus increases, the circumferential stress value of the inner layer cylinder gradually increases, while the circumferential stress value of the outer layer cylinder gradually decreases. It reflects that the softer the cylinder material is, the smaller the stress value is, and the harder the cylinder material is, the greater the stress value is. The extreme value of circumferential stress tends to appear in the cylinder region with larger elastic modulus.
-
In the multi-layer thick-walled cylinder, when the lateral pressure coefficient approaches 1, the circumferential stress in the inner and outer layers changes gently and the numerical range becomes narrower. When the lateral pressure coefficient approaches 0, the change of the inner and outer layers circumferential stress is steeper and the numerical range is wider.
These conclusions provide specific theoretical guidance and technical support for solving the mechanical problems of multi-layer thick-walled cylinder.
References
Timoshenko, S.P., Goodier, J.N.: Theory of Elasticity. McGraw-Hill, New York (1970)
Gao, Y.T., Wu, Q.L., Lü, A.Z.: Stress analytic solution of a double-layered thick-walled cylinder with smooth contact interface subjected to a type of non-uniform distributed pressures. Eng. Mech. 30(10), 93–99 (2013). https://doi.org/10.6052/j.issn.1000-4750.2012.06.0439
Jiang, B.S.: Elastic analysis of the composite shaft linings. J. China Coal Soc. 22(4), 397–401 (1997). CNKI:SUN:MTXB.0.1997-04-012
Jiang, Z.L., Zhao, J.H., Lü, M.T., Zhang, L.: Unified solution of limit internal pressure for double-layered thick-walled cylinder based on bilinear hardening model. Eng. Mech. 35(S1), 6–12 (2018). https://doi.org/10.6052/j.issn.1000-4750.2017.05.S025
Wang, S., Zhao, J.H., Jiang, Z.L., Zhu, Q.: Solution of ultimate bearing capacity for a double-layered thick-walled cylinder with different tension and compression characteristics. Chinese Q. Mech. 40(03), 603–612 (2019). https://doi.org/10.15959/j.cnki.0254-0053.2019.03.19
Lu, A., Xu, G., Zhang, L.: Optimum design method for double-layer thick-walled concrete cylinder with different modulus. Mater. Struct. 44(5), 923–928 (2011). https://doi.org/10.1617/s11527-010-9676-7
Qiu, J., Zhou, M.: Analytical solution for interference fit for multi-layer thick-walled cylinders and the application in crankshaft bearing design. Appl. Sci. 6(167), 1–20 (2016). https://doi.org/10.3390/app6060167
Wu, Q.-L., Lü, A.-Z., Gao, Y.-T., Wu, S.-C., Zhang, N.: Stress analytical solution for plane problem of a double-layered thick-walled cylinder subjected to a type of non-uniform distributed pressure. J. Cent. South Univ. 21(5), 2074–2082 (2014). https://doi.org/10.1007/s11771-014-2156-4
Loghman, A., Parsa, H.: Exact solution for magneto-thermo-elastic behaviour of double-walled cylinder made of an inner FGM and an outer homogeneous layer. Int. J. Mech. Sci. 88, 93–99 (2014). https://doi.org/10.1016/j.ijmecsci.2014.07.007
Zhong, W.X.: New Solution System for Theory of Elasticity. Dalian University of Technology Press, Dalian, China (1995)
Yao, W.A., Zhong, W.X., Lim, C.W.: Symplectic Elasticity. World Scientific, Singapore (2009)
Zhou, J.F., Zhuo, J.S.: A new solution of elasticity in polar coordinate. Acta. Mech. Sin. 33(6), 839–846 (2001). https://doi.org/10.3321/j.issn:0459-1879.2001.06.015
Tseng, W.D., Tarn, J.Q.: Three-dimensional solution for the stress field around a circular hole in a plate. J. Mech. 30(6), 611–624 (2014). https://doi.org/10.1017/jmech.2014.48
Wu, Q.L., Lü, A.Z.: Stress analytical solution for plane problem of a thick-walled cylinder subjected to a type of non-uniform distributed pressures. Eng. Mech. 28(6), 6–10 (2011)
Guo, X., Hou, G.: On the block basis property of the off-diagonal Hamiltonian operators and its application to symplectic elasticity. The Eur. Phys. J. Plus 131(10), 1–8 (2016). https://doi.org/10.1140/epjp/i2016-16368-y
Jiang, Z.Y., Zhou, G.Q.: Comparative study of wellhole surrounding rock under nonuniform ground stress. Adv. Civ. Eng. 2019, 1–9 (2019). https://doi.org/10.1155/2019/7424123
Jiang, Z., Zhou, G., Jiang, L.: Symplectic elasticity analysis of stress in surrounding rock of elliptical tunnel. KSCE J. Civ. Eng. 24(10), 3119–3130 (2020). https://doi.org/10.1007/s12205-020-1810-7
Eburilitu Completeness of the eigenfunction systems of infinite dimensional Hamiltonian operators and its applications in elasticity, Inner Mongolia University (2011)
Funding
This research was funded by the National Natural Science Foundation of China (Grant No. 42102082); and Key Research Program of Anhui Polytechnic University (Grant No. KZ42020043); National College Student Innovation and Entrepreneurship Training Program (Grant No. 202010363122).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Ethics declarations
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2022 The Author(s)
About this paper

Cite this paper
Jiang, Z., Zhang, Y., Liu, H., Li, X. (2022). Symplectic Elastic Solution of Multi-layer Thick-Walled Cylinder Under Different Interlayer Constraints. In: Feng, G. (eds) Proceedings of the 8th International Conference on Civil Engineering. ICCE 2021. Lecture Notes in Civil Engineering, vol 213. Springer, Singapore. https://doi.org/10.1007/978-981-19-1260-3_21
Download citation
DOI: https://doi.org/10.1007/978-981-19-1260-3_21
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-1259-7
Online ISBN: 978-981-19-1260-3
eBook Packages: EngineeringEngineering (R0)