
Abstract
The accessible, up-to-date, reliable, and usable data are considered sustainability tools for developing spatial data infrastructure. Geospatial data come from multi-sources and are georeferenced using an appropriate mapping reference system. Artificial satellite positioning data are now defined on a global geocentric frame, whereas traditional geodetic networks were built on a national datum. Hence, three-dimensional (3D) coordinate transformations are required for data harmonization using control points that can be caused some discrepancies between the physical reality and represented positions. In practice, grid-on-grid conversion is a mathematical model matching GNSS observations and official spatial data through two common datasets to minimize the datum-to-datum transformation errors. This research conducts a comparative analytical study of the conformal polynomial algorithms for map-matching with global coordinates utilizing least-squares estimation. The findings indicated that the proposed approach provides superior performance and employs any area with high accuracy.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
A high-precision coordinate system is crucial for establishing a spatial data infrastructure and a paperless land administration system to promote long-term sustainable socio-economic growth [1, 2]. The satellite-based geodetic techniques have opened a new era for determining the high positional quality of points on the topographical surface in a geocentric three-dimensional system using precise observations of artificial celestial bodies. In the past, most national maps were produced by traditional surveying methods and relied on a non-geocentric local datum selected to deliver the best possible match of the earth's figure within a defined geographical area [3]. The global navigation satellite system (GNSS) is utilized to build more accurate geodetic control points and other applications within the mapping industry [4, 5]. Accordingly, developing a mathematical algorithm connecting two spatial reference frames is a critical challenge to guarantee the consistency of the coordinates. In reality, several researchers have extensively addressed the three-dimensional coordinate transformation in the literature to change between GNSS-derived coordinates and national terrestrial ones using the common points between two datasets [6,7,8,9,10,11,12]. In contrast, the discrepancies in triangulation stations are inevitable because a local datum is oriented astronomically at an initial point, the ellipsoidal surface is not earth-centered, and its rotational axis is not coincident with the earth's axis [13]. In addition, the horizontal control scale change generates a stretch in the related lines of the network [14].
Grid-on-grid transformation is applied to define a mathematical relationship between two sets of georeferenced spatial data obtained from separate sources with different grid reference systems [15]. It generally converts two-dimensional coordinates described by axes rotations, origin transitions, and a scale change [16]. Several methods have been investigated in the literature to address this issue by determining the parameters of the prediction model through control points in both systems [17,18,19]. The number of training sample data and their geographical distribution pattern significantly impact the accuracy of estimating algorithm parameters [20, 21]. As a result, redundant observations and the least-squares technique give the optimum solution for calculating polynomial coefficients and evaluating their accuracy and root mean square error (RMSE) of data points [22]. This research investigates different two-dimensional conformal transformation models to determine which algorithm performs best in this context and develops a spatial tool in the Microsoft Visual Studio environment to solve the addressed issue by minimizing the sum of errors’ squares. In addition, quantitative and qualitative methods are utilized to evaluate the findings by employing statistical analysis and descriptive illustrations.
2 Materials and Methods
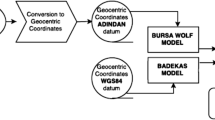
It is necessary to cope with an increasingly broad spectrum of positioning information acquired from multi-sources such as terrestrial surveying and GNSS receiver observations. The location of a feature in space is related to a wide range of national and global datums. Hence, a comprehensive understanding of the various coordinate systems and their proper transformations is essential to guarantee an accurate evaluation of reference frame variations to deliver high-quality products in geospatial data processing activities. A transformation model is commonly applied to change GNSS-based coordinates to those in a national datum through two datasets of reference stations defined in both systems. Its parameters characterize the relationship between various spatial reference systems, significantly correlated with the diverse and local nature of deformations inherent in geodetic frameworks.
2.1 Case Study Description
The Swiss coordinate system (CH1903) is a geodetic reference frame for the national network in Switzerland for various mapping purposes. It is a cylindrical projection based on the Bessel ellipsoid and the Mercator projection. The geodetic network in Switzerland consists of several permanent control points on the earth's surface that have been accurately observed using traditional and advanced geodetic techniques. Figure 1 depicts the spatial distribution of first- and second-order Swiss triangulation points across Switzerland. The density and distribution of the points can significantly impact the data's accuracy, as well as the suitability of the data for different types of applications. The Federal Office of Topography swisstopo is responsible for maintaining and managing the geodetic network and the CH1903 coordinate system in Switzerland.

Spatial distribution of 1st and 2nd order Swiss triangulation points
2.2 Grid-on-Grid Transformation
A coordinate transformation is a process of changing the point coordinates from one reference system to another [23], which can be broken into combining axes rotations, origin shifts, and scaling factors. The transformation parameters are initially calculated using the least-squares surface fitting approach. Hence, the other point coordinates are converted utilizing the interpolation algorithm. The two-dimensional conversion model is the most prevalent in surveying and mapping applications. On the other hand, geospatial data is acquired from various sources and georeferenced using a proper grid system. With the advent of artificial satellite positioning data, this issue has become critical for integrating GNSS observations and official spatial data to reduce the discrepancies between the physical reality and represented positions. The general formula of grid-on-grid transformation using the polynomial functions is presented in Eq. 1 [24].
In which aij and bij are polynomial coefficients, and u its degree.
The six terms up to the first degree of the polynomials surface describe the well-known affine transformation in Eq. 1. Indeed, a conformal transformation of coordinates preserves local angles that can be satisfied by applying the Cauchy - Riemann conditions on the polynomials model [25]. The number of the conformal polynomial coefficients (m) is proportional to the polynomial degree. The fourth-degree conformal algorithms are given in Eq. 4, where first-order functions define the similarity (Helmert) transformation and the quantities beyond that, referred to as conformal deformation.
A linear scale factor and meridian convergence at any point are typically illustrated in the theory of map projections utilizing relations 6 and 7 [26].
where
3 Results and Discussion
Errors in coordinate conversion can impact the mapping between target locations and pointing positions. Local distortion describes how the transformation from one coordinate system to another affects the spatial relationships between nearby points. It is an essential concept in geographic information systems (GIS) and spatial data analysis, as it helps to understand how changes in the coordinate system influence spatial data accuracy. Figure 2 describes the displacement vectors of distortion for control stations, with their original location serving as a starting point and the transformed position as an ending point. The vector's length illustrates the distance from the reference point to the point, whereas the vector's direction defines the direction of the displacement. As shown in Fig. 2, some points moved in the southeast direction and others in the northwest, indicating that the movement of the earth's crust (also known as tectonic movement) can cause displacement of points on the earth's surface.

Displacement vectors of triangulation point between the original and transformed coordinates
Figure 3 shows the displacement in the easting coordinates for three various polynomial transformation models of different degrees: first, second, and third. These models are utilized to describe the relationship between the displacement in the east–west direction and some other variables. As the polynomial degree increases, the displacement value tends to decrease for a given coordinate. This trend can be seen by comparing the curves representing the different models in the graph. This observation is also apparent when examining the displacement in the northing coordinates, as shown in Fig. 4, where the third-order polynomial model yields the lowest displacement values and the best fit to the data. Moreover, the results’ statistical distribution is investigated to understand further the influence of the polynomial degree on the displacement value. This is illustrated in the box plots depicted in Fig. 5, which show each model's range, median, and quartiles of displacement values. These plots demonstrate that the first-degree polynomial always yields the highest displacement values, indicating that it has the lowest performance among the three models. On the other hand, the third-order polynomial consistently provides the best capabilities for the northing and easting coordinates, with the lowest displacement values and the most.

Differences in easting coordinates after applying addressed models

Differences in northing coordinates after applying addressed models

Displacement in easting and northing coordinates after applying addressed models
4 Conclusion
This research investigates the effectiveness of conformal polynomial algorithms for making maps consistent with global coordinates using least-squares estimation to minimize the difference between the observed data and the model's predicted values. The study aims to determine the accuracy and reliability of these algorithms for map-matching with global coordinates and compare their performances. Based on the statements above, the following conclusions are drawn:
-
(1)
The grid-on-grid transformation method using conformal polynomial algorithms was effective in minimizing errors in converting geospatial data from multiple sources.
-
(2)
The study showed that increasing the polynomial degree decreased displacement values and improved performance.
-
(3)
The third-order polynomial model was the most accurate and reliable for easting and northing coordinates.
-
(4)
This approach is useful for harmonizing data from different reference systems and can be applied in any area with high accuracy.
References
Habib M (2022) Fit-for-purpose conformal mapping for sustainable land administration in war-ravaged Syria. Heliyon, e09384
Fazilova D (2022) Uzbekistan’s coordinate system transformation from CS42 to WGS84 using distortion grid model. Geod Geodyn 13(1):24–30
Villar-Cano M, Marqués-Mateu Á, Jiménez-Martínez M J (2019) Triangulation network of 1929–1944 of the first 1: 500 urban map of València. Surv Rev52
Hill AC, Limp F, Casana J, Laugier EJ, Williamson M (2019) A new era in spatial data recording: low-cost GNSS. Adv Archaeol Pract 7(2):169–177
Abdalla A, Mustafa M (2021) Horizontal displacement of control points using GNSS differential positioning and network adjustment. Meas 174:108965
Yang Y (1999) Robust estimation of geodetic datum transformation. J Geod 73(5):268–274
You RJ, Hwang HW (2006) Coordinate transformation between two geodetic datums of Taiwan by least-squares collocation. J Surv Eng 132(2):64–70
Schaffrin B, Felus YA (2008) On the multivariate total least-squares approach to empirical coordinate transformations three algorithms. J Geod 82(6):373–383
Mahboub V (2012) On weighted total least-squares for geodetic transformations. J Geod 86(5):359–367
Even-Tzur G (2018) Coordinate transformation with variable number of parameters. Surv Rev 52
Abbey DA, Featherstone WE (2020) Comparative review of molodensky-badekas and burša-wolf methods for coordinate transformation. J Surv Eng 146(3):04020010
Kalu I, Ndehedehe CE, Okwuashi O, Eyoh AE (2022) Estimating the seven transformational parameters between two geodetic datums using the steepest descent algorithm of machine learning. Appl Comput Geosci 100086
Ogi S, Murakami M (2000) Construction of the new japan datum using space geodetic technologies. in towards an integrated global geodetic observing system (IGGOS), pp. 103–105. Springer, Berlin
Torge W, Müller J(2012) Geodesy. Geod. de Gruyter
Janssen V (2009) Understanding coordinate reference systems, datums and transformations. Int J Geoinform 5(4):41–53
Konakoglu B, Cakır L, Gökalp E (2016) 2D coordinate transformation using artificial neural networks. Int Arch Photogram Remote Sen Spatial Inf Sci 42:183
Vincenty T (1987) Conformal transformations between dissimilar plane coordinate systems. Surv Map 47(4):271–274
Mercan HÜSEYİN, Akyilmaz O, Aydin C (2018) Solution of the weighted symmetric similarity transformations based on quaternions. J Geod 92(10):1113–1130
Dąbrowski PS, Specht C, Specht M, Burdziakowski P, Makar A, Lewicka O (2021) Integration of multi-source geospatial data from GNSS receivers, terrestrial laser scanners, and unmanned aerial vehicles. Can J Remote Sens 47(4):621–634
Harwin S, Lucieer A (2012) Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from unmanned aerial vehicle (UAV) imagery. Remote Sens 4(6):1573–1599
Habib M (2021) Evaluation of DEM interpolation techniques for characterizing terrain roughness. CATENA 198:105072
Amiri-Simkooei A, Jazaeri S (2012) Weighted total least squares formulated by standard least squares theory. J Geod Sci 2(2):113–124
Maling DH (2013) Coordinate systems and map projections. Elsevier
Habib M, A'kif MS (2019) Evaluation of alternative conformal mapping for geospatial data in Jordan. J Appl Geod 13(4):335–344
Thomas PD (1852) Conformal projections in geodesy and cartography, vol. 4. US Government Printing Office
Habib M (2008) Proposal for developing the Syrian stereographic projection. Surv Rev 40(307):92–101
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s)
About this paper

Cite this paper
Habib, M. (2023). Grid-on-Grid Transformation for Integrating Spatial Reference System of Multi-source Data. In: Feng, G. (eds) Proceedings of the 9th International Conference on Civil Engineering. ICCE 2022. Lecture Notes in Civil Engineering, vol 327. Springer, Singapore. https://doi.org/10.1007/978-981-99-2532-2_53
Download citation
DOI: https://doi.org/10.1007/978-981-99-2532-2_53
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-2531-5
Online ISBN: 978-981-99-2532-2
eBook Packages: EngineeringEngineering (R0)