
Abstract
5 kinds of regular polyhedra and 13 kinds of semi-regular polyhedra are taken as the main research objects in this paper to explore the form design method of polyhedral expansion through the rotation of polygon. Firstly, the expandable range of uniform convex polyhedra is defined and divided into two types of expansion. Then three solutions are proposed, namely, discarding polygonal faces, constructing rigid-foldable origami mechanisms and constructing scissor-like elements, so that the prior unexpandable uniform convex polyhedron can be expanded. These methods extend the range of expandable uniform convex polyhedron, and can provide new form design ideas for frontier fields such as movable furniture (toys), movable art installations, 3D kinetic facades and space architecture.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keyword
1 Introduction
Uniform convex polyhedra are convex polyhedra in which faces are regular polygons and angles are the same, including regular polyhedra, semi-regular polyhedra and infinite prisms. In geometry, two important classes of convex polyhedra consisting of regular polygonal faces with highly symmetrical geometry are regular polyhedron and semi-regular polyhedron [3]. A Regular polyhedron is composed of only one regular polygon, which contains 5 polyhedra, while a semi-regular polyhedron is composed of more than one regular polygon, which contains 13 polyhedra (Fig. 1). The number of valences of each vertex of a regular polyhedron and a semi-regular polyhedron is the same, and the size of vector is the same from the centre of the polyhedron to each vertex [2], so there is equivalence of each vertex.
Polyhedral expansion is a process in which the polyhedral faces are regarded as rigid faces and the vertices of the polyhedral faces are hinged with each other to expand through the rotation of the polyhedral faces. The main research objects are regular polyhedra and semi-regular polyhedra. The easy control of polyhedral expansion degree satisfies users’ demand for different heights and widths of furniture, which makes it valuable in the field of movable furniture. While the interest and visual appreciation of polyhedral expansion have explored its application potential in the field of movable art installations. At the same time, the homogeneity of the expansion direction of the polyhedron and its internal space with capacity make it an ideal model in the field of space architecture.

Regular and semi-regular polyhedra
2 Previous Study
Buckminister Fuller [4] discovered that an octahedron could be transformed into a hexoctahedron by hinging and rotating the vertices of triangular faces in the octahedron, and named this mode of motion as “Jitterbug” [4] (Fig. 2). Clinton [2] extended the “Jitterbug” mode of motion to regular and semi-regular polyhedra, and proposed three types of transformation, namely face rotation-translation transformation, element rotation-translation transformation and vertice rotation-translation transformation [2]. Stuart [6] proposed seven rules of definition for regular and semi-regular polyhedra, and studied the process of partial polyhedral expansion [6]. Rotation-translation transformation refers to the transformation in which each surface rotates about its axis, translates along its axis, and maintains connection with one of its paired vertices; the surfaces enclosing the polyhedron will transform into another polyhedral form [6] (Fig. 3). According to above definition of rotation-translation transformation, the motion trajectories of each face and vertex can be determined. The vertices on the same surface are used to draw circumcircle, and extrude the circumcircle in the direction from the center point to the center point of the surface to get a cylinder. The intersection lines of adjacent cylinders are the motion trajectories of the vertices connecting the adjacent surfaces in the process of motion [5] (Fig. 4).
Dreher [7] proposed the node construction of “constant dihedral hinge” to solve the unstable problem of Jitterbug motion. Verheyen [7] used mathematical tools to describe the motion trajectory of vertices and surfaces in the motion process of Jitterbug, and discussed the expansion of regular and semi-regular polyhedra [7].

Source of picture https://wvutoday.wvu.edu/
Jitterbug mode of motion.

Source of picture [6]
Rotation-translation transformation

Source of picture [5]
The movement of the Jitterbug transformation
3 Types of Expansion
Previous classifications of expansion types are biased towards morphological analysis. In this paper, from the perspective of morphological construction, the expansion of uniform convex polyhedra is divided into the following three types: polyhedral expansion adding hinged points, polyhedral expansion adding hinged links and polyhedral expansion adding hinged faces (Fig. 5).
Polyhedral expansion adding hinged points: Add hinged points at the vertex of the polygonal faces of a uniform convex polyhedron, around which the surface can be rotated to expand or close. Polyhedral expansion adding hinged links: the intersecting edge of the polygonal faces of the uniform convex polyhedron is added with hinged links of equal length to the length of side. The vertices of the polygonal faces are hinged with the endpoint of hinged links, and the polygonal faces are connected with each other through hinged links. Polyhedral expansion adding hinged faces: Add the same polygonal faces as the expanded polyhedron to form a double-layer structure, which is hinged at the center point of the polygon.

Three types of polyhedral expansion
Polyhedral expansion adding hinged points is single-degree-of-freedom, and there are polyhedra cannot be expanded. Polyhedral expansion adding hinged links is multi-degree-of-freedom, and all polyhedra can be expanded. Polyhedral expansion adding hinged faces is based on the polyhedral expansion adding hinged points, and whether it can be expanded also depends on the polyhedral expansion adding hinged points. Therefore, the following focuses on the polyhedral expansion adding hinged points, and discusses the expansion of uniform convex polyhedron.
4 Study on Uniform Convex Polyhedral Expansion
4.1 Expandable Uniform Convex Polyhedra
Among 18 uniform convex polyhedra, 12 can be expanded according to the rotation-translation transformation mode of motion without increasing or decreasing the faces of the polyhedron. There are gaps in the expansion of a uniform convex polyhedron. According to the number of vertices contained in the closed state of the gap, the 12 polyhedra can be divided into the following two types: The first type, all polygonal faces around a vertex are hinged to expand, and the gap of expansion is rhombus; The second type, all polygonal faces around two adjacent vertices are hinged to each other, with expanded gap of “S” or “Z” shape (Fig. 6).

Two types of 12 expandable polyhedra
4.2 Unexpandable Uniform Convex Polyhedra and Their Solutions
Among expandable uniform convex polyhedra, there are at most two states of polygon (the state of a polygon refers to the relationship among a polygon and its adjacent polygons). Two states of polygon are similar to the two sides of a parallelogram, and It's not stable. While 6 uniform convex polygons that are not expandable have three states of polygon, which are similar to the relationship among the three sides of a triangle. The three states of polygon define their relative positions, so that they form a stable structure and cannot be expanded (Fig. 7).
In view of this feature, the unexpandable problem can be solved in the following two ways: First, reduce a state of polygon; Second, transform a state of polygon from a non-scalable to scalable structure. The first way can be achieved by discarding polygonal faces, and the second way can be achieved by constructing rigid-foldable origami mechanisms and scissor-like elements.

Unexpandable polyhedra and their state of polygon
4.2.1 Discarding Polygonal Faces
When the polygonal faces of a certain state are discarded, three states of polygon in the uniform convex polyhedron are reduced to two. And it becomes out of stability, so the original unexpandable polyhedron is transformed into expandable structure. The discarded polygonal faces can be polygonal faces in any state in the polyhedron. Therefore, there are many choices for discarding and various forms of expansion after discarding. Now take Great rhomicuboctahedron as an example. The polyhedron has three states of polygon: State 1, is an octagon (4, 6, 4, 6, 4, 6, 4, 6) surrounded by 4 squares and 4 hexagons; State 2, is a hexagon (4, 8, 4, 8, 4, 8) surrounded by 3 squares and 3 octagons; State 3, is a square (6, 8, 6, 8) surrounded by 2 hexagons and 2 octagons. Therefore, there are three kinds of discarding options. The following figure (Fig. 8) shows three kinds of discarding options of polygonal faces and the state of expansion after discarding.

Choices for discarding and the state of expansion after discarding
4.2.2 Constructing Rigid-Foldable Origami Mechanisms
Rigid origami is an important branch of origami [8]. Therefore, the folding process of the rigid origami pattern is, in fact, the motion of mechanisms. Unlike paper, which can be bent and deformed freely, most engineering materials have a certain degree of stiffness, so rigid origami is formed. Rigid-foldable origami mechanisms are rigid foldable plate structures in which rigid plane surfaces are hinged to each other through common edges [1]. The mechanism can be folded into different spatial shapes from flat forms through hinges, and the face only rotates along the hinges without bending and stretching.
The construction of rigid-foldable origami mechanisms to achieve polygonal scaling (Fig. 9):
-
(a)
Determine the polygonal faces that need to be scaled in the uniform convex polyhedron;
-
(b)
Connect the vertex of the polygon with the center point, and the lines are valley lines in the origami mechanism;
-
(c)
Connect the center point and center point of each side of the polygon, the lines are peak lines in the origami mechanism;
-
(d)
In the process of polygonal contraction, valley lines are concave inward, and peak lines are convex outward (peak lines and valley lines can exchange with each other, and the prominent direction of the origami mechanism changes accordingly).
Figure 10 shows the process of expanding the polyhedron from closed to maximum expanded state with Small rhomicuboctahedron as prototype, using equilateral triangles as scaling polygons to construct a rigid-foldable origami mechanism.

Diagram of rigid-foldable origami mechanism construction

A rigid-foldable origami mechanism of Small rhomicuboctahedron
4.2.3 Constructing Scissor-Like Elements
A basic scissor-like element is formed by bars that are interconnected along their length by one or more revolute joints—the Intermediate hinges—allowing one free revolution in their (common) plane [1]. Scissor-like elements can be formed by linking scissor-like element together through articulated joints at their end nodes. During the unfolding process of the mechanism composed of scissor-like elements, all the bars move synchronously. Based on variations in the basic scissor-like element—the shape of the bars and placement of the intermediate hinges—three general subgroups can be identified: translational-, polar-, and angulated elements [1]. The Hoberman mechanism is a typical application example of scissor-like elements.
The construction of scissor-like elements to realize polygonal scaling: The edges of the polygonal face selected for scaling are directly replaced by scissor-like elements, which is hinged at the end of the edge to realize the expansion of polyhedron. The following figure shows the process of expanding the polyhedron from closed to maximum expanded state with Small rhomicuboctahedron as prototype, using the equilateral triangles as scaling polygons to construct scissor-like elements (Fig. 11).

A scissor-like elements of small rhomicuboctahedron
4.3 Architectural Applications of Expandable Uniform Convex Polyhedra
Based on the polyhedral expansion principle which have been discussed, different polyhedra can be transformed to each other by means of face’s rotation and translation. If several faces of the polyhedra are able to fold forward, the polyhedra can be folded into plane state. Using rigid origami mechanism to fill the gap of the expansion can realize the transformation from different polyhedra in closed space. Therefore, the installation based on the polyhedral expansion principle can realize different forms of secondary expansion from the plane state.
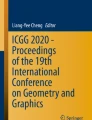
Taking the transformation between Hexahedron and Hexoctahedron as an example (Fig. 12), the Hexahedron can be expanded from a square plane to a Hexahedron in form, and the Hexahedron can be further expanded to a Hexoctahedron. If the side length of the Hexahedron is 3.6 m and the volume is 46.6 m3, the volume would be 110 m3 after the expansion into the Hexoctahedron, which increased by 2.3 times. Originally one-story space in Hexahedron can be transformed into two-story space after expansion into Hexoctahedron.

Transformation and architectural application between Hexahedron and Hexoctahedron
5 Conclusions
In this paper the expandable range of uniform convex polyhedra is defined, and it is divided into two types of expansion according to the number of vertices in the closed state of the expansion gap. The three methods proposed in this paper achieve the same maximum expansion degree of polyhedra, but each has its own characteristics (Figs. 13 and 14). In addition, there is also a way of expanding by constructing plane hinged tessellations, which needs to be further explored in the future.
The three methods proposed in this paper achieve the same maximum expansion degree of polyhedra, but each has its own characteristics. The method of discarding polygonal faces does not occupy the inner and outer space of polyhedra during their expansion and closure, but the closed state of polyhedra is not completely closed. The method of constructing rigid-foldable origami mechanisms does not occupy space in the closed state, but occupy internal (or external) space selectively in the unfolding process, and the polyhedra are completely closed in the closed state. The method of constructing scissor-like elements occupies both the inner and outer space of polyhedra in the closing and expanding process, and the closing state is not completely closed. These methods extend the expandable range of uniform convex polyhedron, and can provide new form design ideas for frontier fields such as movable furniture (toys), movable art installations, 3D kinetic facades and space architecture.

6 originally unexpandable polyhedra using 3 ways to expand—1

6 originally unexpandable polyhedra using 3 ways to expand—2
References
Bouten, S.: Transformable Structures and Their Architectural Application, p. 196. Universiteit Gent, Department of Structural Engineering (2015)
Clinton, J.D.: Advanced Structural Geometry Studies. Part 2: A Geometric Transformation Concept for Expanding Rigid Structures. NASA. Washington, D. C (1971)
Cromwell, P.R.: Polyhedra. Cambridge University Press, Cambridge (1997)
Buckminster Fuller, R., Krausse, J., Lichtenstein, C.: Your private sky: Discourse R. Buckminster Fuller. Baden/Schweiz: Verlag Lars Müller (2001)
Roelofs, R.: Odd or Even, Jitterbug Versus Grünbaum’s Double Polyhedra. Trends in Mathematics, pp. 77–86 (2022)
Stuart, D.R.: The Student Publication of the School of Design. North Carolina State College, Raleigh, North Carolina, vol. 12(1) (1963)
Verheyen, H.F.: The complete set of Jitterbug transformers and the analysis of their motion. Symmetry 2, 203–250 (1989)
Wang, K., Chen, Y.: Folding a patterned cylinder by rigid origami. Origami 5, 265–276 (2011)
Acknowledgements
This research was supported by the National Natural Science Foundation of China(52378043).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2024 The Author(s)
About this paper

Cite this paper
Liu, M., Ding, C., Wang, H. (2024). An Exploration on the Form Design of Movable Structures Based on Uniform Convex Polyhedral Expansion. In: Yan, C., Chai, H., Sun, T., Yuan, P.F. (eds) Phygital Intelligence. CDRF 2023. Computational Design and Robotic Fabrication. Springer, Singapore. https://doi.org/10.1007/978-981-99-8405-3_7
Download citation
DOI: https://doi.org/10.1007/978-981-99-8405-3_7
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-8404-6
Online ISBN: 978-981-99-8405-3
eBook Packages: EngineeringEngineering (R0)