
Abstract
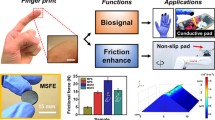
The core capabilities of soft grippers/soft robotic hands are grasping and manipulation. At present, most related research often improves the grasping and manipulation performance by structural design. When soft grippers rely on compressive force and friction to achieve grasping, the influence of the surface microstructure is also significant. Three types of fingerprint-inspired textures with relatively regular patterns were prepared on a silicone rubber surface via mold casting by imitating the three basic shapes of fingerprint patterns (i.e., whorls, loops, and arches). Tribological experiments and tip pinch tests were performed using fingerprint-like silicone rubber films rubbing against glass in dry and lubricated conditions to examine their performance. In addition to the textured surface, a smooth silicone rubber surface was used as a control. The results indicated that the coefficient of friction (COF) of the smooth surface was much higher than that of films with fingerprint-like textures in dry and water-lubricated conditions. The surface with fingerprint-inspired textures achieved a higher COF in oil-lubricated conditions. Adding the fingerprint-like films to the soft robotic fingers improved the tip pinch gripping performance of the soft robotic hand in lubricated conditions. This study demonstrated that the surface texture design provided an effective method for regulating the grasping capability of humanoid robotic hands.

Article PDF
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
References
Shintake J, Cacucciolo V, Floreano D, Shea H. Soft robotic grippers. Adv Mater 30(29): 1707035 (2018)
Langowski J K A, Sharma P, Shoushtari A L. In the soft grip of nature. Sci Robot 5(49): eabd9120 (2020)
Laschi C, Cianchetti M, Mazzolai B, Margheri L; Follador M, Dario P. Soft robot arm inspired by the octopus. Adv Robot 26(7): 709–727 (2012).
Martinez R V, Branch J L, Fish C R, Jin L H, Shepherd R F, Nunes R M D, Suo Z G, Whitesides G M, George M. Robotic tentacles with three-dimensional mobility based on flexible elastomers. Adv Mater 25(2): 205–212 (2013)
Tiefeng S, Mingyu D, Guanjun B, Bao G J, Yang Q H. Fruit harvesting continuum manipulator inspired by elephant trunk. Int J Agr Biol Eng 8(1): 57–63 (2015)
Xie Z, Domel A G, An N, et al. Octopus arm-inspired tapered soft actuators with suckers for improved grasping. Soft Robot 7(5): 639–648 (2020)
Galloway K C, Becker K P, Phillips B, Kirby J, Licht S, Tchernov D, Wood R J, Gruber D F. Soft robotic grippers for biological sampling on deep reefs. Soft Robot 3(1): 23–33 (2016)
Liao B, Zang H, Chen M, Wang Y, Lang X, Zhu N N, Yang Z, Yi Y. Soft rod-climbing robot inspired by winding locomotion of snake. Soft Robot 7(4): 500–511 (2020)
Deimel R, Brock O. A novel type of compliant and underactuated robotic hand for dexterous grasping. Int J Robot Res 35(1–3): 161–185 (2016)
Shahid Z, Glatman A L, Ryu S C. Design of a soft composite finger with adjustable joint stiffness. Soft Robot 6(6): 722–732 (2019)
Zhang H, Kumar A S, Chen F, Fuh J Y H, Wang M Y. Topology optimized multimaterial soft fingers for applications on grippers, rehabilitation, and artificial hands. IEEE ASME T Mech 24(1): 120–131 (2019)
Zhang N, Ge L, Xu H, Zhu X, Gu G. 3D printed, modularized rigid-flexible integrated soft finger actuators for anthropomorphic hands. Sens Actuat A Phys 312(1): 112090 (2020)
Wang W, Yu C Y, Abrego Serrano P A, Ahn S H. Shape memory alloy-based soft finger with changeable bending length using targeted variable stiffness. Soft Robot 7(3): 283–291 (2020)
Subramaniam V, Jain S, Agarwal J, Alvarado P V Y. Design and characterization of a hybrid soft gripper with active palm pose control. Int J Robot Res 39(14): 1668–1685 (2020)
Kim D, Yun D. A study on the effect of fingerprints in a wet system. Sci Rep 9: 16554 (2019)
Gechev A. Fluid containing structures in the tips of the fingers and toes delineated by ultrasound imaging before and after induced skin wrinkling. Sci Rep 9: 1640 (2019)
Davis N J. Water-immersion finger-wrinkling improves grip efficiency in handling wet objects. PLoS One 9(2): 20120999 (2021)
Trinh H X, Ho V A, Shibuya K. Theoretical foundation for design of friction-tunable soft finger with wrinkle’s morphology. IEEE Robot Autom Let 4(4): 4027–4034 (2019)
Changizi M, Weber R, Kotecha R, Palazzo J. Are wet-induced wrinkled fingers primate rain treads. Brain Behav Evolut 77(4): 286–290 (2011)
Hao Y, Biswas S, Hawkes E W, Wang T M, Zhu M J, Wen L, Visell Y. A multimodal, enveloping soft gripper: Shape conformation, bioinspired adhesion, and expansion-driven suction. IEEE T Robot 37(2): 350–362 (2021)
Seibel A, Yildiz M, Zorlubas A B. A gecko-inspired soft passive gripper. Biomimetics 5(2): 1–12 (2020)
Wang H, Xu H, Abu-Dakka F J, Kyrki V, Yang C, Li X, Chen S. A bidirectional soft biomimetic hand driven by water hydraulic for dexterous underwater grasping. IEEE Robot Autom Let 7(2): 2186–2193 (2022)
Wang H, Abu-Dakka F J, Le T N, Kyrki, V, He X. A novel design of soft robotic hand with a human-inspired soft palm for dexterous grasping. arXiv 2009.00979 (2020)
Hussain I, Al-Ketan O, Renda F, Malvezzi M, Prattichizzo D, Seneviratne L, Abu Al-Rub R K, Gan D M. Design and prototyping soft-rigid tendon-driven modular grippers using interpenetrating phase composites materials. Int J Robot Res 39(14): 1635–1646 (2020)
Pozzi M, Marullo S, Salvietti G, Bimbo J, Malvezzi M, Prattichizzo D. Hand closure model for planning top grasps with soft robotic hands. Int J Robot Res 39(14): 1706–1723 (2020)
Teeple C B, Koutros T N, Graule M A, Wood R J. Multi-segment soft robotic fingers enable robust precision grasping. Int J Robot Res 39(14): 1647–1667 (2020)
Mannam P, Rudich A, Zhang K, Veloso M, Kroemer O, Temel F Z. A low-cost compliant gripper using cooperative mini-delta robots for dexterous manipulation. In Robotics: Science and Systems XVII, Held Virtually. 2021.
Abondance S, Teeple C B, Wood R J. A dexterous soft robotic hand for delicate in-hand manipulation. IEEE Robot Autom Let 5(4): 5502–5509 (2020)
Sinatra N R, Teeple C B, Vogt D M, Parker K K, Gruber D F, Wood R J. Ultragentle manipulation of delicate structures using a soft robotic gripper. Sci Robot 4(33): eaax5425 (2019)
Rus D, Tolley M T. Design, fabrication and control of soft robots. Nature 521: 467–475 (2015)
Hao T, Xiao H, Liu S, Zhang C, Ma H. Multijointed pneumatic soft hand with flexible thenar. Soft Robot 9(4): 745–753 (2022)
Mathiowetz V, Kashman N, Volland G, Weber K, Dowe M, Rogers S. Grip and pinch strength: normative data for adults. Arch Phys Med Rehab 66(2): 69–74 (1985)
Valentin L P, Markus H. Method of dimensionality reduction in contact mechanics and friction. Berlin (Germany): Springer, 2015.
Yuan H, Ma H. Line detection for point set of varying discrete degrees. In Fourth International Conference on Image and Graphics (ICIG 2007), Sanya, China, 2007: 453–458.
Tomlinson, S P, Davis, N J, Morgan, H M, Bracewell R M. Hemispheric specialisation in haptic processing. Neuropsychologia 49(9): 2703–2710 (2011)
Acknowledgements
This work is supported by the Science Foundation of China University of Petroleum-Beijing (Nos. 2462020XKJS01 and 2462020YXZZ046) and National Key R&D Program of China (No. 2017YFC0805800).
Author information
Authors and Affiliations
Corresponding authors
Additional information
Tianze HAO. He received her bachelor degree in mechanical engineering and automation in 2018 from Northeast Petroleum University, China. After then, he was a Ph.D. student in mechanical engineering in China University of Petroleum-Beijing, China. His research interests include soft robotic and surface engineering.
Huaping XIAO. He received his bachelor degree in 2006 from Tianjin University, Tianjin, China and master degree in 2011 from Tsinghua University, Beijing, China. He has earned Ph.D. degree in mechanical engineering in 2014 from Texas A&M University (TAMU), USA. He joined the College of Mechanical and Transportation Engineering at China University of Petroleum from 2014. His current position is an associate professor. His research areas include tribology properties and wear behaviors under complicated work condition and bio-related tribological systems.
Shuhai LIU. He received his Ph.D. degree in mechanical engineering in 2009 from Tsinghua University, Beijing, China. He joined the College of Mechanical and Transportation Engineering at China University of Petroleum-Beijing from 2009. His current position is a professor and the assistant dean of the college. His research interests include tribology, surface science, and petroleum science.
Yibo LIU. He received his bachelor degree in mechanical engineering and automation in 2018 from China University of Petroleum-Beijing, China. After then, He was a Ph.D. student in mechanical engineering at the same university. His research interests include soft robotic and surface engineering.
Electronic Supplementary Material
40544_2022_688_MOESM1_ESM.pdf
Fingerprint-inspired surface texture for the enhanced tip pinch performance of a soft robotic hand in lubricated conditions
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made.
The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Hao, T., Xiao, H., Liu, S. et al. Fingerprint-inspired surface texture for the enhanced tip pinch performance of a soft robotic hand in lubricated conditions. Friction 11, 1349–1358 (2023). https://doi.org/10.1007/s40544-022-0688-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40544-022-0688-4