
Abstract
In this paper, the modified generalized Laguerre operational matrix (MGLOM) of Caputo fractional derivatives is constructed and implemented in combination with the spectral tau method for solving linear multi-term FDEs on the half-line. In this approach, truncated modified generalized Laguerre polynomials (MGLP) together with the modified generalized Laguerre operational matrix of Caputo fractional derivatives are analyzed and applied for numerical integration of such equations subject to initial conditions. The modified generalized Laguerre pseudo-spectral approximation based on the modified generalized Laguerre operational matrix is investigated to reduce the nonlinear multi-term FDEs and their initial conditions to a nonlinear algebraic system. Through some numerical experiments, we evaluate the accuracy and efficiency of the proposed methods. The methods are easy to implement and yield very accurate results.
Similar content being viewed by others

1 Introduction
Fractional calculus has been used to develop accurate models of many phenomena of science, engineering, economics, and applied mathematics. These models are found to be best described by FDEs [1–6]. More recently, Butkovskii et al. [7, 8] used fractional calculus for description of the dynamics of various systems and control processes.
Several numerical and analytical methods have been proposed in the literature for approximating FDEs (see [9–18]). In this direction, Atabakzadeh et al. [19] used the operational matrix of Caputo fractional-order derivatives for Chebyshev polynomials, which was derived in [20] to solve a system of FDEs. In [21] Tripathi et al. presented an approximate solution of multi-term FDEs using the operational matrix of fractional integration of the generalized hat basis functions. The authors of [22] presented a direct solution technique for approximating the linear multi-order FDEs on semi-infinite interval based on the tau method and proposed the modified generalized Laguerre collocation methods for solving the nonlinear FDEs. Recently, Kazem et al. [23] investigated the operational matrices of the fractional-order Legendre functions and used them together with the spectral tau approximation to solve linear initial value problems of fractional orders. The Taylor matrix method, in which the power is fractional number, was developed for approximating the relaxation-oscillation equation in [24]. A Jacobi operational matrix was proved and applied for approximating the multi-term FDEs in [25] and a linear fuzzy fractional differential equation in [26]. Ahmadian et al. [27] derived the operational matrix of Legendre polynomials and applied it for solving a fuzzy fractional differential equation.
The authors of [28] presented a numerical method for the solution of fractional differential equations. In this method, the properties of the Caputo derivative are used to reduce the given fractional differential equation into a Volterra integral equation. More recently, the authors of [29–31] proposed the operational matrices of Riemann-Liouville fractional integration of Chebyshev, Laguerre, modified generalized Laguerre polynomials which are employed in combination with tau approximation for the numerical solution of linear FDEs on finite and semi-infinite intervals. We refer also to the recent papers [32–35] in which the authors studied the existence and uniqueness of several classes of FDEs; for application of such equations, see [36–40] and the references therein.
In [31], the authors derived the operational matrix of Riemann-Liouville fractional integration of MGLP and applied it for approximating the linear FDEs on the half-line. In this article, we aim to derive the operational matrix of Caputo fractional derivatives of MGLP. Furthermore, the MGLOM will be used in combination with the spectral tau scheme for approximating linear FDEs, and with the pseudo-spectral scheme for approximating nonlinear FDEs on the half-line. It is worth mentioning here that the Laguerre operational matrix and the generalized Laguerre operational matrix [41] can be obtained as special cases of MGLP. Finally, the accuracy of the proposed algorithms are demonstrated by test problems.
This paper is organized as follows. In Section 2, we present some properties of MGLP. The MGLOM of fractional derivative is constructed and proved in detail in Section 3. Section 4 is devoted to implementing the tau and collocation spectral schemes in combination with the MGLOM of fractional derivative for approximating two classes of multi-term FDEs. Some numerical experiments are presented in Section 5. The results are summarized in the final section.
2 Some basic preliminaries
We give some definitions and properties of fractional derivatives and modified generalized Laguerre polynomials (see [2, 42]).
Definition 2.1 The Riemann-Liouville fractional integral operator of order ν () is defined as
Definition 2.2 The Caputo fractional derivatives of order ν are defined as
where is the classical differential operator of order m.
For the Caputo derivative, we have
where and are the ceiling and floor functions respectively, while and .
The Caputo fractional differentiation is a linear operation similar to the integer-order differentiation
where λ and μ are constants.
We recall below some relevant properties of the modified generalized Laguerre polynomials (see [43–45]). Now, let and be a weight function on Λ in the usual sense. Define
equipped with the following inner product and norm
Next, let be the MGLP of degree i for , and is defined by
For and , we have
where and .
The set of MGLP is the -orthogonal system, namely
where is the Kronecker function and .
The modified generalized Laguerre polynomial of degree i on the interval Λ is given by
where .
The special value
will be of important use later.
3 MGLOM of Caputo fractional derivatives
Let , then may be expressed in terms of MGLP as
In particular applications, the MGLP up to degree are considered. Then we have
where the modified generalized Laguerre coefficient vector C and the modified generalized Laguerre vector are given by
then the derivative of the vector can be expressed by
where is the operational matrix of derivative given by
By using Eq. (12), it is clear that
where and the superscript in denotes matrix powers. Thus
Lemma 3.1 Let be a modified generalized Laguerre polynomial, then
Proof Immediately, if we use Eqs. (4) and (5) in Eq. (7), the lemma can be proved. □
In what follows, we derive the operational matrix of Caputo fractional derivatives for MGLP.
Theorem 3.2 Let be a modified generalized Laguerre vector defined in Eq. (11) and consider , then
where is the operational matrix of Caputo fractional derivatives of order ν and is given by
where
Note that in , the first rows are all zero.
Proof The analytic form of the MGLP of degree i is obtained by (7). Making use of (4), (5) and (7), we get
Now, approximating by terms of modified generalized Laguerre series, we have
where is given from (9) with , and
Employing Eqs. (18)-(20), we get
where
Accordingly, Eq. (21) can be written in a vector form as follows:
Also, according to Lemma 3.1, we can write
A combination of Eqs. (23) and (24) leads to the desired result. □
Remark In the case of , Theorem 3.2 gives the same result as Eq. (13).
4 Applications of the MGLOM for FDEs
The main aim of this section is to approximate linear and nonlinear multi-term FDEs using the MGLOM based on modified generalized Laguerre tau and pseudo-spectral approximations respectively.
4.1 Linear multi-term FDEs
Consider the linear FDE
with initial conditions
where () are real constant coefficients, , and () are the initial values of .
To solve the fractional initial value problem, (25)-(26), we approximate and by modified generalized Laguerre polynomials as
where a vector is known and is an unknown vector.
By using Theorem 3.2 (Eqs. (16) and (27)), we have
If we use (27)-(30), then the residual for Eq. (25) can be given by
As in a typical tau method, see [20, 30, 46], we generate linear equations by applying
Also, by substituting Eqs. (13) and (27) into Eq (26), we get
Eqs. (32) and (33) generate and m sets of linear equations, respectively. These linear equations can be solved for unknown coefficients of the vector C. Consequently, given in Eq. (27) can be calculated, which gives the solution of the initial value problem in Eqs. (25) and (26).
4.2 Nonlinear multi-term FDEs
In this section, in order to show the high importance of the MGLOM of Caputo fractional derivatives, we apply it to approximate nonlinear multi-term FDEs. Regarding such problems on the interval Λ, we investigate the modified generalized Laguerre pseudo-spectral scheme based on the MGLOM to obtain the numerical solution . The nonlinear FDE is collocated at nodes of the modified generalized Laguerre-Gauss interpolation on the interval Λ, and then the problem reduces to the system of algebraic equations.
Consider the nonlinear FDE
with initial conditions (26), where F can be nonlinear in general.
In order to use the MGLOM for approximating (34), we expand , and for as (27), (29) and (30) respectively, and then (34) becomes
Substituting (27) and (13) in (34) gives
Collocating (35) at nodes of modified generalized Laguerre-Gauss interpolation yields
For every two special choices of the modified generalized Laguerre parameters α and β, the above-mentioned system of algebraic equations together with (36) gives the nonlinear system of equations which may be solved by Newton’s iterative method.
5 Illustrative examples
To illustrate the effectiveness of the proposed algorithms, six illustrative examples are implemented by the two methods proposed in the previous section. The results obtained by the proposed algorithms reveal that these algorithms are very effective and convenient for approximating the linear and nonlinear FDEs on a semi-infinite interval.
Example 1 Consider the FDE
The exact solution is .
Now, we implement the tau technique based on the MGLOM of fractional derivative with , then the approximate solution may be written as
Here, we get the following operational matrices:
where and are evaluated from (9) and (17), respectively.
Firstly, applying the tau method to (38) (see relation (32)) yields
Secondly, applying (33) to the initial conditions yields
Finally, solving (39)-(41), we have the three unknown coefficients with various choices of α and β which are given in Table 1. Then, we have
Consequentially, we can write
which is the exact solution.
Example 2 Consider the equation
whose exact solution is given by .
By applying the technique described in Section 4.1 with and , we approximate the solution as
Here, we have
where and are computed from (9) and (17), respectively.
Therefore using (32), we obtain
Now, by applying (33), we have
Finally, by solving (43)-(45), we have the four unknown coefficients with various choices of α and β which are displayed in Table 2. Then we get
and
Example 3 Consider the FDE
where
and the exact solution is given by .
The maximum absolute errors using the MGLOM together with the tau approximation, for and various choices of N, α and β are shown in Table 3. Moreover, the approximate solution obtained by this method for , and two choices of N and γ is shown in Figures 1 and 2. Also, maximum absolute error for and different values of γ, α, and β are displayed in Table 4.

Comparing the exact solution and the approximate solutions at , where , and .

Comparing the exact solution and the approximate solutions at , where , and .
Example 4 Consider the nonlinear FDE
where is the exact solution.
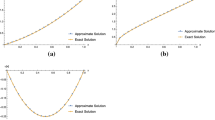
The solution of this problem is obtained by applying the modified generalized Laguerre collocation method. The approximate solution obtained by the proposed method for , , and two choices of N are shown in Figures 3 and 4 to make it easier to compare with the analytic solution. Moreover, the absolute errors for , , and are given in Figures 5 and 6.

Comparing the exact solution and the approximate solutions at , where , and .

Comparing the exact solution and the approximate solutions at , where , and .

The absolute error for , , and at .

Maximum absolute error by using MGLOM with the various choices of N and .
Example 5 Consider the nonlinear FDE
where
and the exact solution is given by .
The solution of this problem is implemented by the modified generalized Laguerre collocation method. The maximum absolute error obtained by the proposed method for various choices of N, α and β, where , is given in Figure 7. Moreover, the approximate solution obtained by the proposed method for , and two choices of N is shown in Figure 8.

Comparing the exact solution and the approximate solutions at , where , and .

The absolute error for , , and at .
Example 6 Consider the following nonlinear initial value problem:
whose exact solution is given by .
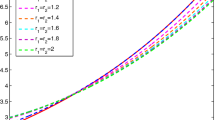
Comparison between the curves of exact solutions and the approximate solutions at and of the proposed problem subject to in case of and four different fractional orders are shown in Figures 9 and 10. The maximum absolute errors at for various choices of α, β and N in the interval are shown in Table 5. Moreover, Figures 11 and 12 display a comparison between the curves of exact solutions and the approximate solutions at and of the proposed problem subject to in case of and four different fractional orders . From Figures 9-12, it can be seen that the numerical solutions are in complete agreement with the exact solutions for all values of ν. Also, from the numerical results implemented in this example and the previous ones, the classical Laguerre polynomial (, ), which is used most frequently in practice, is not the best one, especially when we are approximating the solution of FDEs.

Comparing the exact solution and the approximate solutions at , , and .

Comparing the exact solution and the approximate solutions at , , and .

Comparing the exact solution and the approximate solutions at , , and .

Comparing the exact solution and the approximate solutions at , , and .
6 Conclusions
In this paper, we have proposed two efficient spectral methods based on modified generalized Laguerre polynomials for tackling linear and nonlinear FDEs on the half-line. In these methods, the problem is reduced to the solution of a system of algebraic equations in the expansion coefficient of the solution. Illustrative examples were implemented to demonstrate the applicability of the proposed algorithms. The computational results show that the proposed methods can be effectively used in numerical solution of a time-dependent fractional partial differential equation and other problems on the half-line.
References
Baleanu D, Diethelm K, Scalas E, Trujillo JJ Series on Complexity, Nonlinearity and Chaos. In Fractional Calculus Models and Numerical Methods. World Scientific, Singapore; 2012.
Miller K, Ross B: An Introduction to the Fractional Calculus and Fractional Differential Equations. Wiley, New York; 1993.
Ortigueira M: Introduction to fraction linear systems. Part 1: continuous-time case. 147. IEE Proceedings Vision, Image, Signal Processing 2000, 6-70.
Herzallah MAE, Baleanu D: Fractional Euler-Lagrange equations revisited. Nonlinear Dyn. 2012, 69: 977-982. 10.1007/s11071-011-0319-5
Baleanu D: New applications of fractional variational principles. Rep. Math. Phys. 2008, 61: 199-206. 10.1016/S0034-4877(08)80007-9
Baleanu D, Muslih S: Lagrangian formulation of classical fields within Riemann-Liouville fractional derivatives. Phys. Scr. 2005, 72: 119-121. 10.1238/Physica.Regular.072a00119
Butkovskii AG, Postnov SS, Postnova EA: Fractional integro-differential calculus and its control-theoretical applications. I. Mathematical fundamentals and the problem of interpretation. Autom. Remote Control 2013, 74: 543-574. 10.1134/S0005117913040012
Butkovskii AG, Postnov SS, Postnova EA: Fractional integro-differential calculus and its control-theoretical applications. II. Fractional dynamic systems: modeling and hardware implementation. Autom. Remote Control 2013, 74: 725-749. 10.1134/S0005117913050019
Doha EH, Bhrawy AH, Ezz-Eldien SS: Efficient Chebyshev spectral methods for solving multi-term fractional orders differential equations. Appl. Math. Model. 2011, 35: 5662-5672. 10.1016/j.apm.2011.05.011
Song J, Yin F, Cao X, Lu F: Fractional variational iteration method versus Adomian’s decomposition method in some fractional partial differential equations. J. Appl. Math. 2013., 2013: Article ID 10
El-Ajou A, Abu Arqub O, Momani S: Solving fractional two-point boundary value problems using continuous analytic method. Ain Shams Engineering Journal 2013. 10.1016/j.asej.2012.11.010
Saadatmandi A: Bernstein operational matrix of fractional derivatives and its applications. Appl. Math. Model. 2013. 10.1016/j.apm.2013.08.007
Bhrawy AH, Alshomrani M: A shifted Legendre spectral method for fractional-order multi-point boundary value problems. Adv. Differ. Equ. 2012., 2012: Article ID 8
Baleanu D, Alipour M, Jafari H: The Bernstein operational matrices for solving the fractional quadratic Riccati differential equations with the Riemann-Liouville derivative. Abstr. Appl. Anal. 2013., 2013: Article ID 461970
Jankowski T: Initial value problems for neutral fractional differential equations involving a Riemann-Liouville derivative. Appl. Math. Comput. 2013, 219: 7772-7776. 10.1016/j.amc.2013.02.001
Bhrawy AH, Alghamdi MA: A shifted Jacobi-Gauss-Lobatto collocation method for solving nonlinear fractional Langevin equation involving two fractional orders in different intervals. Bound. Value Probl. 2012., 2012: Article ID 62
Ma X, Huang C: Spectral collocation method for linear fractional integro-differential equations. Appl. Math. Model. 2013. 10.1016/j.apm.2013.08.013
Ghandehari MAM, Ranjbar M: A numerical method for solving a fractional partial differential equation through converting it into an NLP problem. Comput. Math. Appl. 2013, 65: 975-982. 10.1016/j.camwa.2013.01.003
Atabakzadeh MH, Akrami MH, Erjaee GH: Chebyshev operational matrix method for solving multi-order fractional ordinary differential equations. Appl. Math. Model. 2013. 10.1016/j.apm.2013.04.019
Doha EH, Bhrawy AH, Ezz-Eldien SS: A Chebyshev spectral method based on operational matrix for initial and boundary value problems of fractional order. Comput. Math. Appl. 2011, 62: 2364-2373. 10.1016/j.camwa.2011.07.024
Tripathi MP, Baranwal VK, Pandey RK, Singh OP: A new numerical algorithm to solve fractional differential equations based on operational matrix of generalized hat functions. Commun. Nonlinear Sci. Numer. Simul. 2013, 18: 1327-1340. 10.1016/j.cnsns.2012.10.014
Baleanu D, Bhrawy AH, Taha TM: A modified generalized Laguerre spectral method for fractional differential equations on the half line. Abstr. Appl. Anal. 2013., 2013: Article ID 413529
Kazem S, Abbasbandy S, Kumar S: Fractional-order Legendre functions for solving fractional-order differential equations. Appl. Math. Model. 2013, 37: 5498-5510. 10.1016/j.apm.2012.10.026
Gulsu M, Ozturk Y, Anapali A: Numerical approach for solving fractional relaxation-oscillation equation. Appl. Math. Model. 2013, 37: 5927-5937. 10.1016/j.apm.2012.12.015
Doha EH, Bhrawy AH, Ezz-Eldien SS: A new Jacobi operational matrix: an application for solving fractional differential equations. Appl. Math. Model. 2012, 36: 4931-4943. 10.1016/j.apm.2011.12.031
Ahmadian A, Suleiman M, Salahshour S, Baleanu D: A Jacobi operational matrix for solving a fuzzy linear fractional differential equation. Adv. Differ. Equ. 2013., 2013: Article ID 104
Ahmadian A, Suleiman M, Salahshour S: An operational matrix based on Legendre polynomials for solving fuzzy fractional-order differential equations. Abstr. Appl. Anal. 2013., 2013: Article ID 505903
Esmaeili S, Shamsi M, Dehghan M: Numerical solution of fractional differential equations via a Volterra integral equation approach. Cent. Eur. J. Phys. 2013. 10.2478/s11534-013-0212-6
Bhrawy AH, Alofi AS: The operational matrix of fractional integration for shifted Chebyshev polynomials. Appl. Math. Lett. 2013, 26: 25-31. 10.1016/j.aml.2012.01.027
Bhrawy AH, Taha TM: An operational matrix of fractional integration of the Laguerre polynomials and its application on a semi-infinite interval. Math. Sci. 2012. 10.1186/2251-7456-6-41
Bhrawy AH, Alghamdi MM, Taha TM: A new modified generalized Laguerre operational matrix of fractional integration for solving fractional differential equations on the half line. Adv. Differ. Equ. 2012. 10.1186/1687-1847-2012-179
Balachandran K, Kiruthika S: Existence of solutions of nonlinear fractional pantograph equations. Acta Math. Sci. 2013, 33: 712-720. 10.1016/S0252-9602(13)60032-6
Alikhani R, Bahrami F: Global solutions for nonlinear fuzzy fractional integral and integrodifferential equations. Commun. Nonlinear Sci. Numer. Simul. 2013, 18: 2007-2017. 10.1016/j.cnsns.2012.12.026
Baleanu D, Mustafa OG, Agarwal RP: An existence result for a superlinear fractional differential equation. Appl. Math. Lett. 2010, 23: 1129-1132. 10.1016/j.aml.2010.04.049
Salahshour S, Allahviranloo T, Abbasbandy S, Baleanu D: Existence and uniqueness results for fractional differential equations with uncertainty. Adv. Differ. Equ. 2012., 2012: Article ID 112
Javidi M, Nyamoradi N: Dynamic analysis of a fractional order prey-predator interaction with harvesting. Appl. Math. Model. 2013. 10.1016/j.apm.2013.04.024
Ezzat MA, El-Karamany AS, El-Bary AA, Fayik MA: Fractional calculus in one-dimensional isotropic thermo-viscoelasticity. C. R., Méc. 2013. 10.1016/j.crme.2013.04.001
Allahviranloo T, Salahshour S, Ebadi MJ, Avazpour L, Baleanu D: Fuzzy fractional Ostrowski inequality with Caputo differentiability. J. Inequal. Appl. 2013., 2013: Article ID 50
Yang X, Baleanu D, Tenreiro Machado JA: Mathematical aspects of Heisenberg uncertainty principle within local fractional Fourier analysis. Bound. Value Probl. 2013, 2013: 131-150. 10.1186/1687-2770-2013-131
Tenreiro Machado JA: Optimal tuning of fractional controllers using genetic algorithms. Nonlinear Dyn. 2010, 62: 447-452. 10.1007/s11071-010-9731-5
Baleanu D, Bhrawy AH, Taha TM: Two efficient generalized Laguerre spectral algorithms for fractional initial value problems. Abstr. Appl. Anal. 2013., 2013: Article ID 546502
Kilbas AA, Srivastava HM, Trujillo JJ: Theory and Applications of Fractional Differential Equations. Elsevier, Amsterdam; 2006.
Guo B-Y, Zhang X: A new generalized Laguerre spectral approximation and its applications. J. Comput. Appl. Math. 2005, 181: 342-363. 10.1016/j.cam.2004.12.008
Szegö G Am. Math. Soc. Colloq. Pub. 23. Orthogonal Polynomials 1985.
Gulsu M, Gurbuz B, Ozturk Y, Sezer M: Laguerre polynomial approach for solving linear delay difference equations. Appl. Math. Comput. 2011, 217: 6765-6776. 10.1016/j.amc.2011.01.112
Canuto C, Hussaini MY, Quarteroni A, Zang TA: Spectral Methods Fundamentals in Single Domains. Springer, Berlin; 2006.
Acknowledgements
The authors would like to thank the editor and the reviewers for their constructive comments and suggestions to improve the quality of the article.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
The authors have equal contributions to each part of this paper. All the authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Bhrawy, A.H., Alghamdi, M.A. The operational matrix of Caputo fractional derivatives of modified generalized Laguerre polynomials and its applications. Adv Differ Equ 2013, 307 (2013). https://doi.org/10.1186/1687-1847-2013-307
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2013-307