
Abstract
A stage-structured predator-prey model (stage structure for both predator and prey) with modified Leslie-Gower and Holling-II schemes is studied in this paper. Using the iterative technique method and the fluctuation lemma, sufficient conditions which guarantee the global stability of the positive equilibrium and boundary equilibrium are obtained. Our results indicate that for a stage-structured predator-prey community, both the stage structure and the death rate of the mature species are the important factors that lead to the permanence or extinction of the system.
Similar content being viewed by others


1 Introduction
Since the pioneer work of Aiello and Freedman [1], the stage-structured population models have been investigated extensively and many excellent results have been obtained (see [1–35]). Recently, Huo et al. [5] considered a stage-structured predator-prey model with modified Leslie-Gower and Holling-type II schemes as follows:
where \(x_{1}\), \(x_{2}\), and y represent the population densities of immature prey, mature prey and predator at time t, respectively; \(r_{1}\) is the birth rate of immature prey \(x_{1}\); \(d_{11}\) denotes the death rate of the immature prey \(x_{1}\); \(r_{2}\) is the intrinsic growth rate of predator y; b represents the strength of intra-specific competition in the mature prey; \(a_{1}\) represents the maximum value that mature \(x_{2}\) can be captured by predator y, and the meaning of \(a_{2}\) is similar to \(a_{1}\); \(k_{1}\) and \(k_{2}\) measure the protection degree that the environment could afford for prey \(x_{2}\) and predator y, respectively; \(\tau_{1}\) is the time to maturity for prey; \(r_{1}e^{-d_{11}\tau_{1}}x_{2}(t-\tau_{1})\) represents the prey who were born at time \(t-\tau_{1}\) and survive and become mature at time t.
In [5], the authors analyzed the dynamics of system (1.1), specially, by using the iterative technique, the authors obtained a set of sufficient conditions which guarantee the existence of a unique globally attractive positive equilibrium. Li et al. [6] found that some of the conditions in [5] are redundant, and they obtained the following result.
Theorem A
Suppose that
holds, then the system (1.1) has a unique globally attractive positive equilibria E.
As we can see, [5] and [6] only considered the stage structure of immature and mature of the prey species, yet they ignored that of the predator ones. Already, several scholars had proposed and investigated the dynamic behaviors of the predator-prey system with stage structure for predator species [8–11, 17, 24–26]. Indeed, Wang and Chen [17] considered the following predator-prey system with stage structure for the predator population:
In [17], the authors studied the asymptotic behavior of the above system. When a time delay due to gestation of the predators and a time delay from a crowding effect of the prey are incorporated, they establish conditions for the permanence of the populations and sufficient conditions under which a positive equilibrium of the above system is globally stable; Zhang and Luo [8] argued that above system is not a realistic model because it is an autonomous system, and they incorporated a type IV functional response into above system; by using the continuation theorem of coincidence degree theory, the existence of multiple positive periodic solutions for the system is established. Recently, Chen et al. [10, 11] studied the persistence and extinction property of the following stage-structured predator-prey system (stage structure for both predator and prey, respectively):
where \(x_{1}(t)\) and \(x_{2}(t)\) denote the densities of the immature and mature prey species at time t, respectively; \(y_{1}(t)\) and \(y_{2}(t)\) represent the immature and mature population densities of predator species at time t, respectively; \(r_{i}(t)\), \(b_{i}(t)\), \(c_{i}(t)\) (\(i=1,2\)) are all continuous functions bounded above and below by positive constants for all \(t \geq0\). \(d_{ij}\), \(\tau_{i}\), \(i,j=1,2\) are all positive constants. There are many interesting properties of this system, for example, due to the influence of the stage structure, the extinction of the predator species could not directly imply the permanence of the prey species. The extinction of the prey species could not lead to the extinction of the predator species. Under certain assumptions, the system would be broken, which means that both predators and prey species would be driven to extinction. However, all the works of [9–11] did not take the functional response of the predator species into consideration.
Now, stimulated by the work of [5, 6, 9–11], we consider the following stage-structured predator-prey model (stage structure for both predator and prey, respectively) with modified Leslie-Gower and Holling-type II schemes:
where \(d_{12}\) and \(d_{21}\) represent the death rate of mature prey \(x_{2}\) and mature predator \(y_{2}\), respectively; \(\tau_{1}\) is the time length of the prey species from immature ones to mature ones, \(\tau_{2}\) is the time length of the predator from immature ones to mature ones. Other parameters have the same biological meaning as that of system (1.1). All parameters are positive constants in system (1.2).
The initial conditions for system (1.2) take the form of
where \(\tau=\max{\{\tau_{1},\tau_{2}\}}\). For continuity of the initial conditions, we assume that
Integrating both sides of the first and third equation of system (1.2) (see [12]) over the interval \((0,t)\) leads to
This suggests that the dynamics of model (1.1) is completely determined by its second and fourth equations. Therefore, in the rest of this paper, we investigate the asymptotic behavior for the subsystem of system (1.1) as follows:
The organization of this paper is as follows: The main results are stated and proved in Sections 2 and 3, respectively. In Section 4, several examples together with their numerical simulations are presented to illustrate the feasibility of our main results. We end this paper by a brief discussion. For more work on the Leslie-Gower predator-prey system, one may refer to [36–39] and the references cited therein.
2 Main results
For convenience, we denote
Let \(x'_{2}(t)=0\), \(y'_{2}(t)=0\) in system (1.6), we can get four equilibria as follows:
where E is an interior equilibrium point in system (1.6). The components of E are given by
where \(x^{*}_{2}\) is a positive solution of the second order equation as follows:
where \(C=a_{1}k_{2}\lambda_{2}-a_{2}k_{1}\lambda_{1}\), we can see that there exists a unique \(x_{2}^{*}>0\) if \(C<0\), i.e.,
\(E_{1}\), \(E_{2}\) are two of the boundary equilibria of the system (1.6) if \(\lambda_{1}>0\), \(\lambda_{2}>0 \).
Consequently, we have the following theorem.
Theorem 2.1
Assume that inequality (2.1) holds, then system (1.6) admits a unique positive equilibrium point E.
Theorem 2.2
Suppose that
hold, then the unique positive equilibrium E is globally attractive.
Remark 2.1
If \(d_{12}=d_{21}=0\), \(\tau_{2}\neq0\), that is, we only consider the stage structure of the predator species and ignore the death rate of the mature predator and prey species, in this case, (\(\mathrm{H}_{1}\)) holds naturally, and \(\lambda_{3}\) in condition (\(\mathrm{H}_{2}\)) would reduce to
Noting that \(r_{2}e^{-d_{22}\tau_{2}}< r_{2}\), (\(\mathrm{H}_{2}'\)) is weaker than (H) in Theorem A, this means that the stage structure of predator species has benefit for the coexistence of the system.
Remark 2.2
Suppose that \(\tau_{2}= 0\), i.e., we did not consider the stage structure of the predator species, then \(\lambda_{2}\) and \(\lambda_{3}\) in Theorem 2.2 become \(\lambda_{2}=r_{2}-d_{21}>0\), \(\lambda_{3}=\lambda_{0} - (a_{2}k_{1}b-a_{1}r_{2}+a_{1}d_{21})d_{12}+(a_{1}k_{2}b+a_{1}r_{1}e^{-d_{11}\tau _{1}})d_{21}>0\), respectively.
-
(i)
If \(d_{12}= 0\), \(d_{21}\neq0\), in this case, \(\lambda _{3}>\lambda_{0}\), that is, introducting the mortality item of the predator species improving the coexistence rate of the two species.
-
(ii)
If \(d_{12}\neq0\), \(d_{21}= 0\), in this case, \(\lambda _{0}>\lambda_{3}\), that is, introducting the mortality item of the prey species decreasing the chance of coexistence of both species.
Theorem 2.3
Suppose that
holds, then both of the predator and prey species will be driven to extinction, that is, \(E_{0}\) is globally attractive.
Theorem 2.4
Suppose that
holds, then \(E_{1}\) is globally attractive.
Remark 2.3
From [5], we know that \(E_{0}(0,0,0)\) of the system (1.1) is unstable, which implies the extinction of both predator and prey species is impossible. However, if the death rates of the mature prey and predator species are large enough, (\(\mathrm{H}_{3}\)) in Theorem 2.3 would hold, and consequently both the prey and the predator species will be driven to extinction. By constructing a suitable Lyapunov function, Korobeinikov [27] showed that the unique positive equilibrium of the traditional Leslie-Gower predator-prey model is globally attractive, which means that it is impossible for the predator species to become extinct. However, Theorem 2.4 shows that if the death rate of the mature predator species is large enough, (\(\mathrm{H}_{4}\)) would hold and the predator species will be driven to extinction. Theorems 2.3 and 2.4 show that the death rates of the mature predator and prey species are two of the essential factors to determine the persistent property of the system.
Theorem 2.5
Suppose that
holds, then \(E_{2}\) is globally attractive.
Corollary 2.1
If the parameters of system (1.2) satisfy the condition (2.1), then system (1.2) has a unique positive equilibrium point \(E'(x^{*}_{1},x^{*}_{2},y^{*}_{1},y^{*}_{2})\), where \(x^{*}_{1}= \frac{r_{1}x^{*}_{2}(1-e^{-d_{11}\tau_{1}})}{d_{11}}\), \(y^{*}_{1}=\frac{r_{2}y^{*}_{2}(1-e^{-d_{22}\tau_{2}})}{d_{22}} \).
Corollary 2.2
If the parameters of system (1.2) satisfy the conditions (\(\mathrm{H}_{1}\)) and (\(\mathrm{H}_{2}\)), then \(E'\) is globally attractive.
Corollary 2.3
If the parameters of system (1.2) satisfy the condition (\(\mathrm{H}_{3}\)), then \(E'_{0}=(0,0,0,0)\) is globally attractive.
Corollary 2.4
If the parameters of system (1.2) satisfy the condition (\(\mathrm{H}_{4}\)), then \(E'_{1}=(x_{1*},x_{2*},0,0)\) is globally attractive, where \(x_{1*}=\frac{r_{1}x_{2*}(1-e^{-d_{11}\tau_{1}})}{d_{11}}\).
Corollary 2.5
If the parameters of system (1.2) satisfy the condition (\(\mathrm{H}_{5}\)), then \(E'_{2}=(0,0,y_{1*},y_{2*})\) is globally attractive, where \(y_{1*}=\frac{r_{2}y_{2*}(1-e^{-d_{22}\tau_{2}})}{d_{22}}\).
3 Proof of the main results
Now let us state several lemmas which will be useful in proving the main results.
Lemma 3.1
Assume that \(x_{2}(\theta)\geq0\), \(y_{2}(\theta)\geq0\) are continuous on \(\theta\in[-\tau,0]\), and \(x_{2}(0)>0\), \(y_{2}(0)>0\). Let \((x_{2}(t),y_{2}(t))^{T}\) be a any solution of system (1.6), then \(x_{2}(t)>0\), \(y_{2}(t)>0\) for all \(t>0\).
The proof of Lemma 3.1 is similar to the proof of Theorem 1 in [1], so we omit its proof.
Lemma 3.2
[2]
Consider the following equation:
and assume that \(b, a_{2}>0\), \(a_{1}\geq0\), and \(\delta\geq0\) is a constant. Then
-
(i)
if \(b\geq a_{1}\), then \(\lim_{t\rightarrow+\infty }x(t)= \frac{b-a_{1}}{a_{2}}\);
-
(ii)
if \(b\leq a_{1}\), then \(\lim_{t\rightarrow+\infty}x(t)=0\).
Lemma 3.3
(Fluctuation lemma [23])
Let \(x(t)\) be a bounded differentiable function on \((\alpha,\infty)\), Then there exist sequences \(\gamma_{n}\rightarrow\infty\), \(\sigma _{n}\rightarrow\infty\) such that
-
(i)
\(x'(\gamma_{n})\rightarrow0 \) and \(x(\gamma_{n})\rightarrow\limsup_{t\rightarrow+\infty }x(t)=\overline{x}\) as \(n\rightarrow\infty\),
-
(ii)
\(x'(\sigma_{n})\rightarrow0 \) and \(x(\sigma_{n})\rightarrow\liminf_{t\rightarrow+\infty }x(t)=\underline{x}\) as \(n\rightarrow\infty\).
Lemma 3.4
Assume that \(x_{2}(\theta), y_{2}(\theta )\geq0\) are continuous on \(\theta\in[-\tau,0]\), and \(x_{2}(0)>0\), \(y_{2}(0)>0\). Let \((x_{2}(t),y_{2}(t))^{T}\) be a any solution of system (1.6). If \(\lambda_{2}>0\), then
Proof
From the second equation of system (1.6), we have
Since \(\lambda_{2}>0\), and by applying Lemma 3.2(i), and the standard comparison theorem, we have
This completes the proof of Lemma 3.4. □
Now we start to prove the above results.
Proof of Theorem 2.2
From the first equation of system (1.6), we have
According to condition (\(\mathrm{H}_{1}\)), we know \(r_{1}e^{-d_{11}\tau_{1}}-d_{12}>0\). By applying Lemma 3.2(i), and the standard comparison theorem, we have
So, for any small constant \(\varepsilon>0\), there exists a \(T_{1}>0\) such that
For \(t>T_{1}+\tau_{2}\), substituting (3.1) into the second equation of system (1.6), we have
According to condition (\(\mathrm{H}_{1}\)), we have \(r_{2}e^{-d_{22}\tau_{2}}-d_{21}>0\). By applying Lemma 3.2(i), and the standard comparison theorem, we have
Then, for the above ε, there exists a \(T_{2}>T_{1}+\tau_{2}\), such that
For \(t>T_{2}+\tau_{1}\), substituting (3.2) into the first equation of system (1.6), we have
Let
Then substituting (3.1) and (3.2) into Δ, we have
Then, for small enough \(\varepsilon>0\) and condition (\(\mathrm{H}_{2}\)), we have
By applying Lemma 3.2(i), and the standard comparison theorem, we have
Then, for the above \(\varepsilon>0\), there exists a \(T_{3}>T_{2}+\tau_{1}\), such that
For \(t>T_{3}+\tau_{2}\), substituting (3.4) into the second equation of system (1.6), we have
By applying Lemma 3.2(i), and the standard comparison theorem, we have
Then for the above \(\varepsilon>0\), there exists a \(T_{4}>T_{3}+\tau_{2}\), such that
According to (3.1), (3.2), (3.4), and (3.5), we obtain
Then for \(t>T_{4}+\tau_{1}\), substituting (3.1) and (3.5) into the first equation of system (1.6), we have
According to the inequalities (3.3) and (3.6), we have \(r_{1}e^{-d_{11}\tau_{1}}- (d_{12}+\frac {a_{1}m^{(1)}_{2}}{k_{1}+M^{(1)}_{1}} )>0\). By applying Lemma 3.2(i), and the standard comparison theorem, we have
Then, for the above \(\varepsilon>0\), there exists a \(T_{5}>T_{4}+\tau_{1}\), such that
From inequalities (3.1) and (3.7), we obtain
For \(t>T_{5}+\tau_{2}\), substituting (3.7) into the second equation of system (1.6), we have
By applying Lemma 3.2(i), and the standard comparison theorem, we have
Then for above \(\varepsilon>0\), there exists a \(T_{6}>T_{5}+\tau_{2}\), such that
From inequalities (3.2), (3.8), and (3.9), we have
For \(t>T_{6}+\tau_{1} \), substituting inequalities (3.4) and (3.9) into the first equation of system (1.6), we have
According to inequalities (3.3) and (3.10), we can obtain \(r_{1}e^{-d_{11}\tau_{1}}-d_{12}-\frac{a_{1}M^{(2)}_{2}}{k_{1}+m^{(1)}_{1}}>0\). By applying Lemma 3.2(i), and the standard comparison theorem, we have
Then, for the above \(\varepsilon>0\), there exists a \(T_{7}>T_{6}+\tau_{1}\), such that
According to the inequalities (3.4), (3.10), and (3.11), we can obtain
Substituting inequality (3.11) into the second equation of system (1.6), we have
By applying Lemma 3.2(i), and the standard comparison theorem, we have
Then, for the above \(\varepsilon>0\), there exists a \(T_{8}>T_{7}+\tau_{2}\), such that
According to the inequalities (3.5), (3.12), and (3.13), we can obtain
For \(t>T_{8}\), according to (3.8), (3.10), (3.12), and (3.14), we have
Repeating the above process, we get four sequences
For \(i=1,2\), we claim that \(M^{(n)}_{i}\) are monotonic decreasing sequences, and \(m^{(n)}_{i}\) are monotone increasing sequences. In the following we will prove this claim by induction. First of all, according to inequalities (3.15), we have
Second, we suppose that our claim is true for n, that is,
Noting that
According to inequalities (3.16), (3.17), and (3.18), one could easily see that
Then for \(t>T_{4n}\), we have
Therefore the limits of \(M^{(n)}_{i}\), \(m^{(n)}_{i}\) (\(i=1,2\), \(n=1,2,\ldots\)) exist. Denote that
Consequently, \(\overline{x}_{2} \geq\underline{x}_{2}\), \(\overline{y}_{2} \geq\underline{y}_{2}\). In order to complete the proof, we just need to show that \(\overline {x}_{2}= \underline{x}_{2}\), \(\overline{y}_{2}=\underline{y}_{2}\). Letting \(n\rightarrow+\infty\) in (3.16), we have
It follows from the above four equations that
Subtracting the first equation of (3.19) from the second equation, we get
Suppose that \(\overline{x}_{2}\neq\underline{x}_{2}\), it follows from the above equation that
Substituting (3.20) into (3.19), we find \(\overline {x}_{2} \) and \(\underline{x}_{2}\) both satisfy the following equation:
Simplifying equality (3.21), we get
where
According to condition (\(\mathrm{H}_{2}\)), we can immediately obtain
It implies that
Therefore, we have \(D<0\), that is, equation (3.22) has only one positive root. Then \(\overline{x}_{2}=\underline{x}_{2}\), and consequently, \(\overline{y}_{2}=\underline{y}_{2}\). Obviously, conditions (\(\mathrm{H}_{1}\)), (\(\mathrm{H}_{2}\)) imply inequality (2.1), so system (1.6) has a unique positive equilibrium \(E(x^{*}_{2},y^{*}_{2})\). That is,
This completes the proof of Theorem 2.2. □
Proof of Theorem 2.3
It follows from the first equation of system (1.6) that
According to first inequality of condition (\(\mathrm{H}_{3}\)), we have \(r_{1}e^{-d_{11}\tau_{1}}-d_{12}<0\). By applying Lemma 3.2(ii) and the standard comparison theorem, we have \(\limsup_{t\rightarrow+\infty}x_{2}(t)\leq0\). That is,
Then, for any \(\varepsilon>0\), there exists a \(T>0\) such that
Therefore, it follows from the second equation of system (1.6) that
Similar to the above analysis, we also have
Therefore, \(E_{0}=(0,0)\) is globally attractive. This completes the proof of Theorem 2.3. □
Proof of Theorem 2.4
According to the first inequality of condition (\(\mathrm{H}_{4}\)), we have \(r_{1}e^{-d_{11}\tau_{1}}-d_{12}>0\). Therefore from the proof of Theorem 2.2, we know that
And for any small positive constant \(\varepsilon>0\), there exists a \(T_{1}>0\) such that
According the second inequality of condition (\(\mathrm{H}_{4}\)), we have \(r_{2}e^{-d_{22}\tau_{2}}-d_{21}<0\). By applying Lemma 3.2(ii) and the standard comparison theorem, we have \(\limsup_{t\rightarrow+\infty}y_{2}(t)\leq0\). That is,
Then, for any small \(\varepsilon>0\), there exists \(T_{2}>T_{1}+\tau_{2}\), such that
Substituting inequality (3.24) into the first equation of system (1.6), we have
Since \(r_{1}e^{-d_{11}\tau_{1}}-d_{12}>0\), we can choose sufficiently small \(\varepsilon>0\) such that \(r_{1}e^{-d_{11}\tau _{1}}-d_{12}- \frac{a_{1}\varepsilon}{k_{1}}>0\). By applying Lemma 3.2(i), and the standard comparison theorem, we have
For the above formula, letting \(\varepsilon\rightarrow0\), we have
From inequalities (3.23) and (3.25), we get
Then we have
Therefore, \(E_{1}(x_{2*},0)\) is globally attractive. This completes the proof of Theorem 2.4. □
Proof of Theorem 2.5
According to the fluctuation lemma, there exist two sequences \(\gamma_{n}\rightarrow\infty\), \(\sigma_{n}\rightarrow\infty\) such that \(x'_{2}(\gamma_{n})\rightarrow0\), \(x_{2}(\gamma_{n})\rightarrow\limsup_{t\rightarrow+\infty}x(t)=\overline{x}_{2}\), and \(y'_{2}(\sigma_{n})\rightarrow0 \), \(y_{2}(\sigma_{n})\rightarrow\liminf_{t\rightarrow+\infty}y_{2}(t)=\underline{y}_{2}\) as \(n\rightarrow\infty\). Since from Lemma 3.1, we know \(\overline{x}_{2}\geq0\). In order to prove \(\lim_{t\rightarrow\infty}x_{2}(t)=0\), we only need to prove \(\overline{x}_{2}=0\), so for getting a contradiction, we suppose that \(\overline{x}_{2}>0\). Since for \(\lambda_{2}>0\), and according to Lemma 3.4, we know \(\underline{y}_{2}>0\), it follows from the first equation of the system (1.6) that
Letting \(n\rightarrow\infty\) in the above inequality, we obtain
that is,
From the second equation of system (1.6), by a similar argument, we have
It follows from inequalities (3.26) and (3.27) that
Simplifying the above inequality, we have
According to the second inequality of condition (\(\mathrm{H}_{5}\)), we know \(a_{1}k_{2}\lambda_{2}-a_{2}k_{1}\lambda_{1}>0\), \(a_{2}k_{1}b-a_{2}\lambda_{1}>0\), then only \(\overline{x}_{2}<0 \) can ensure (3.28) holds. And \(\overline{x}_{2}<0\) contradicts the hypothesis \(\overline{x}_{2}>0\), then we get
Then, for any small enough \(\varepsilon>0\), there exists a \(T>0\), such that
Substituting inequality (3.29) into the second equation of system (1.6), we have
According to second inequality of condition (\(\mathrm{H}_{5}\)), we know \(r_{2}e^{-d_{22}\tau_{2}}-d_{21}>0\). By applying Lemma 3.2(i), and the standard comparison theorem, we have
Letting \(\varepsilon\rightarrow0\) in the above inequality, we have
According to Lemma 3.4 and (3.30), we obtain
Then we have
This completes the proof of Theorem 2.5. □
4 Numerical simulations
The following examples show the feasibility of our main results.
Example 4.1
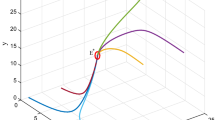
where \(r_{1}=2\); \(r_{2}=1.2\); \(d_{11}=0.4\); \(d_{22}=0.5\); \(\tau_{1}=1\); \(\tau_{2}=1\); \(d_{12}=0.4\); \(d_{21}=0.6\); \(b=0.8\); \(a_{1}=1\); \(a_{2}=2\); \(k_{1}=1\); \(k_{2}=2\). One could easily verify that \(\lambda_{1}\approx r_{1}e^{-d_{11}\tau_{1}}-d_{12}=0.9406>0\), \(\lambda _{2}\approx r_{2}e^{-d_{22}\tau_{2}}-d_{21}=0.1278>0\), \(\lambda_{3}\approx b(a_{2}k_{1}\lambda_{1}-a_{1}k_{2}\lambda_{2}) -a_{1}\lambda_{1}\lambda_{2} =1.1802>0\), which shows conditions (\(\mathrm{H}_{1}\)) and (\(\mathrm{H}_{2}\)) hold. According to Theorem 2.2, system (1.6) has a unique and globally attractive positive equilibrium \(E(1.0571,0.1954)\). Figure 1 indicates the dynamical behavior of system (4.1).

Dynamics behaviors of system ( 4.1 ) with the initial values \(\pmb{(\varphi(\theta),\psi(\theta))^{T}=(0.6,0.09)^{T}}\) , \(\pmb{(1,0.5)^{T}}\) , and \(\pmb{(1.5,1)^{T}}\) , \(\pmb{\theta\in[-1,0]}\) .
Example 4.2
where \(r_{1}=1\); \(r_{2}=1.2\); \(d_{11}=0.5\); \(d_{22}=0.7\); \(\tau_{1}=1\); \(\tau_{2}=1\); \(d_{12}=0.7\); \(d_{21}=0.8\); \(b=0.8\); \(a_{1}=1\); \(a_{2}=2\); \(k_{1}=1\); \(k_{2}=2\). By simple computation, one could see that \(\lambda_{1}\approx-0.0935<0\), \(\lambda _{2}\approx-0.2041<0\), which shows condition (\(\mathrm{H}_{3}\)) holds. It follows from Theorem 2.3 that the solution \(E_{0}(0,0)\) of system (4.2) is globally attractive. Figure 2 shows the feasibility of this case.

Dynamics behaviors of system ( 4.2 ) with initial values \(\pmb{(\varphi(\theta),\psi(\theta))^{T}=(0.3,0.1)^{T}}\) , \(\pmb{(0.6,0.4)^{T}}\) , and \(\pmb{(0.9,0.8)^{T}}\) , \(\pmb{\theta\in[-1,0]}\) .
Example 4.3
where \(r_{1}=2.2\); \(r_{2}=1.5\); \(d_{11}=0.5\); \(d_{22}=0.4\); \(\tau_{1}=2\); \(\tau_{2}=2\); \(d_{12}=0.7\); \(d_{21}=0.8\); \(b=0.8\); \(a_{1}=1\); \(a_{2}=2\); \(k_{1}=1\); \(k_{2}=2\). By computation, we have \(\lambda_{1}\approx0.1093 >0\), \(\lambda_{2}\approx -0.1260<0\), which shows condition (\(\mathrm{H}_{4}\)) holds. It follows from Theorem 2.4 that the boundary equilibrium \(E_{1}(0.1367,0)\) of system (4.3) is globally attractive. Figure 3 supports this assertion.

Dynamics behaviors of system ( 4.3 ) with initial values \(\pmb{(\varphi(\theta),\psi(\theta))^{T}=(0.05,0.09)^{T}}\) , \(\pmb{(0.13,0.1)^{T}}\) , and \(\pmb{(0.19,0.2)^{T}}\) , \(\pmb{\theta\in[-2,0]}\) .
Example 4.4
where \(r_{1}=1.5\); \(r_{2}=1.5\); \(d_{11}=0.4\); \(d_{22}=0.5\); \(\tau_{1}=1\); \(\tau_{2}=1\); \(d_{12}=0.8\); \(d_{21}=0.6\); \(b=0.5\); \(a_{1}=1\); \(a_{2}=1.5\); \(k_{1}=0.6\); \(k_{2}=2\). By computation, we have \(\lambda_{1}\approx0.2055\), \(\lambda_{2}\approx 0.3098>0\), \(\lambda_{1}-\frac{a_{1}k_{2}\lambda_{2}}{a_{2}k_{1}}\approx -0.9945<0\), \(\lambda_{1}-k_{1}b\approx-0.0945<0\), which shows condition (\(\mathrm{H}_{5}\)) holds. It follows from Theorem 2.5 that the solution \(E_{2}(0, 0.4131)\) of system (4.4) is globally attractive. Figure 4 shows the feasibility of this case.

Dynamics behaviors of system ( 4.4 ) with initial values \(\pmb{(\varphi(\theta),\psi(\theta))^{T}=(0.09,0.07)^{T}}\) , \(\pmb{(0.1,0.2)^{T}}\) and \(\pmb{(0.3,0.4)^{T}}\) , \(\pmb{\theta\in[-1,0]}\) .
Example 4.5
where \(r_{1}=2\); \(r_{2}=1.5\); \(d_{11}=0.5\); \(d_{22}=0.7\); \(\tau_{1}=1\); \(\tau_{2}=1\); \(d_{12}=0.7\); \(d_{21}=0.6\); \(b=0.8\); \(a_{1}=1\); \(a_{2}=2\); \(k_{1}=1\); \(k_{2}=2\). And so \(a_{2}k_{1}\lambda_{1}\approx1.0261>0.2898\approx a_{1}k_{2}\lambda_{2}>0\), which shows condition (2.1) holds. However, \(\lambda_{3}\approx-0.3145<0\), and so, condition (\(\mathrm{H}_{2}\)) does not hold. A numeric simulation (Figure 5) shows that the system still admits a unique globally attractive positive equilibrium \(E(0.4900,0.1804)\).

Dynamics behaviors of system ( 4.5 ) with initial values \(\pmb{(\varphi(\theta),\psi(\theta))^{T}=(0.1,0.09)^{T}}\) , \(\pmb{(0.5,0.2)^{T}}\) , and \(\pmb{(1,0.9)^{T}}\) , \(\pmb{\theta\in[-1,0]}\) .
5 Conclusion
Huo et al. [5] and Li et al. [6] studied the stability property of the positive equilibrium of a stage-structured predator-prey model with modified Leslie-Gower and Holling-type II schemes. In those two papers, the authors only consider the stage structure of prey species and ignore that of predator species. Stimulated by [9–11], we consider a model with stage structure for both predator and prey species. By applying an iterative technique and the fluctuation lemma, sufficient conditions which guarantee the global attractivity of all the nonnegative equilibria are obtained. Our study indicates that both the stage structure of the species and the death rate of the mature predator and prey species are the important factors on the dynamic behaviors of the system. If the death rates of the mature prey and predator species are too large or the degree of the stage structure of the species is large enough, then at least one of the species will be driven to extinction. We would like to mention here that Example 4.5 shows that our result in Theorem 2.2 has room for improvement. We conjecture that condition (2.1) is enough to ensure the global attractivity of the positive equilibrium. We leave this for future work.
References
Aiello, WG, Freedman, HI: A time delay model of single-species growth with stage structure. Math. Biosci. 101, 139-153 (1990)
Liu, SQ, Chen, LS, Liu, ZJ: Extinction and permanence in nonautonomous competitive system with stage structure. J. Math. Anal. Appl. 274, 667-684 (2002)
Chen, FD, Wang, HN, Lin, YH, Chen, WL: Global stability of a stage-structured predator-prey system. Appl. Math. Comput. 223, 45-53 (2013)
Li, Z, Chen, FD: Extinction in periodic competitive stage-structured Lotka-Volterra model with the effects of toxic substances. J. Comput. Appl. Math. 231, 143-153 (2009)
Huo, HF, Wang, XH, Chavez, CC: Dynamics of a stage-structured Leslie-Gower predator-prey model. Math. Probl. Eng. 2011, Article ID 149341 (2011)
Li, Z, Han, MA, Chen, FD: Global stability of stage-structured predator-prey model with modified Leslie-Gower and Holling-type II schemes. Int. J. Biomath. 6, Article ID 1250057 (2012)
Liu, SQ: The Research of Biological Model with Stage Structured Population. Science Press, Beijing (2010)
Zhang, ZQ, Luo, JB: Multiple periodic solutions of a delayed predator-prey system with stage structure for the predator. Nonlinear Anal., Real World Appl. 11, 4109-4120 (2010)
Ma, ZH, Wang, SF, Li, T, Zhang, FP: Permanence of a predator-prey system with stage structure and time delay. Appl. Math. Comput. 201, 65-71 (2008)
Chen, FD, Xie, XD, Li, Z: Partial survival and extinction of a delayed predator-prey model with stage structure. Appl. Math. Comput. 219, 4157-4162 (2012)
Chen, FD, Chen, WL, Wu, YM: Permanence of a stage-structured predator-prey system. Appl. Math. Comput. 219, 8856-8862 (2013)
Liu, SQ, Chen, LS, Luo, GL, Jiang, YL: Asymptotic behaviors of competitive Lotka-Volterra system with stage structure. J. Math. Anal. Appl. 271, 124-138 (2002)
Zha, LJ, Cui, JA, Zhou, XY: Ratio-dependent predator-prey model with stage structure and time delay. Int. J. Biomath. 5, Article ID 1250014 (2012)
Shi, RQ, Chen, LS: The study of a ratio-dependent predator-prey model with stage structure in the prey. Nonlinear Dyn. 58, 443-451 (2009)
Song, XY, Li, SL, Li, A: Analysis of a stage-structured predator-prey system with impulsive perturbations and time delays. J. Korean Math. Soc. 46, 71-82 (2009)
Wang, FY, Kuang, Y, Ding, CM, Zhang, SW: Stability and bifurcation of a stage-structured predator-prey model with both discrete and distributed delays. Chaos Solitons Fractals 46, 19-27 (2013)
Wang, WD, Chen, LS: A predator-prey system with stage-structure for predator. Comput. Math. Appl. 33, 83-91 (1997)
Song, XY, Li, YF: Dynamic behaviors of the periodic predator-prey model with modified Leslie-Gower Holling-type II schemes and impulsive effect. Nonlinear Anal., Real World Appl. 9, 64-79 (2008)
Lin, ZG, Pedersen, M, Zhang, L: A predator-prey system with stage-structure for predator and nonlocal delay. Nonlinear Anal., Theory Methods Appl. 72, 2019-2030 (2010)
Sun, XK, Huo, HF, Zhang, XB: A predator-prey model with functional response and stage structure for prey. Abstr. Appl. Anal. 2012, Article ID 628103 (2012)
Liu, SQ, Beretta, E: Competitive systems with stage structure of distributed-delay type. J. Math. Anal. Appl. 323, 331-343 (2006)
Gao, SJ, Chen, LS, Teng, ZD: Hopf bifurcation and global stability for a delayed predator-prey system with stage structure for predator. Appl. Math. Comput. 202, 721-729 (2008)
Chen, FD: Almost periodic solution of the non-autonomous two-species competitive model with stage structure. Appl. Math. Comput. 181(1), 685-693 (2006)
Cai, LM, Song, XY: Permanence and stability of a predator-prey system with stage structure for predator. J. Comput. Appl. Math. 201, 356-366 (2007)
Xu, R, Chaplain, MAJ, Davidson, FA: Periodic solutions of a predator-prey model with stage structure for predator. Appl. Math. Comput. 154, 847-870 (2004)
Gui, ZJ, Ge, WG: The effect of harvesting on a predator-prey system with stage structure. Ecol. Model. 187, 329-340 (2005)
Korobeinikov, A: A Lyapunov function for Leslie-Gower predator-prey models. Appl. Math. Lett. 14, 697-699 (2001)
Chen, FD, Xie, XD, Chen, XF: Dynamic behaviors of a stage-structured cooperation model. Commun. Math. Biol. Neurosci. 2015, Article ID 4 (2015)
Chen, FD, You, MS: Permanence, extinction and periodic solution of the predator-prey system with Beddington-DeAngelis functional response and stage structure for prey. Nonlinear Anal., Real World Appl. 9(2), 207-221 (2008)
Chen, FD: Permanence of periodic Holling type predator-prey system with stage structure for prey. Appl. Math. Comput. 182(2), 1849-1860 (2006)
Pu, LQ, Miao, ZS, Han, RY: Global stability of a stage-structured predator-prey model. Commun. Math. Biol. Neurosci. 2015, Article ID 5 (2015)
Han, RY, Yang, LY, Xue, YL: Global attractivity of a single species stage-structured model with feedback control and infinite delay. Commun. Math. Biol. Neurosci. 2015, Article ID 6 (2015)
Wu, RX, Li, L: Extinction of a reaction-diffusion model of plankton allelopathy with nonlocal delays. Commun. Math. Biol. Neurosci. 2015, Article ID 8 (2015)
Chen, LJ: Permanence of a periodic predator-prey general Holling type functional response and stage structure for prey. Ann. Differ. Equ. 22(3), 253-263 (2007)
Chen, LJ, Chen, FD: A stage-structured and harvesting predator-prey system. Ann. Differ. Equ. 26(3), 293-301 (2011)
Chen, FD, Chen, LJ, Xie, XD: On a Leslie-Gower predator-prey model incorporating a prey refuge. Nonlinear Anal., Real World Appl. 10(5), 2905-2908 (2009)
Yu, SB: Global asymptotic stability of a predator-prey model with modified Leslie-Gower and Holling-type II schemes. Discrete Dyn. Nat. Soc. 2012, Article ID 208167 (2012)
Zhang, N, Chen, F, Su, Q, Wu, T: Dynamic behaviors of a harvesting Leslie-Gower predator-prey model. Discrete Dyn. Nat. Soc. 2011, Article ID 473949 (2011)
Chen, LJ, Chen, FD: Global stability of a Leslie-Gower predator-prey model with feedback controls. Appl. Math. Lett. 22(9), 1330-1334 (2009)
Acknowledgements
The authors are grateful to anonymous referees for their excellent suggestions, which greatly improve the presentation of the paper. The research was supported by the Natural Science Foundation of Fujian Province (2015J01012, 2015J01019, 2015J05006) and the Scientific Research Foundation of Fuzhou University (XRC-1438).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Lin, Y., Xie, X., Chen, F. et al. Convergences of a stage-structured predator-prey model with modified Leslie-Gower and Holling-type II schemes. Adv Differ Equ 2016, 181 (2016). https://doi.org/10.1186/s13662-016-0887-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-016-0887-2