
Abstract
This paper presents alternative representations to traditional calculus of the Euler-Lagrangian equations, in the alternative representations these equations contain fractional operators. In this work, we consider two problems, the Lagrangian of a Pais-Uhlenbeck oscillator and the Hamiltonian of a two-electric pendulum model where the fractional operators have a regular kernel. The Euler-Lagrange formalism was used to obtain the dynamic model based on the Caputo-Fabrizio operator and the new fractional operator based on the Mittag-Leffler function. The simulations showed the effectiveness of these two representations for different values of γ.
Similar content being viewed by others

1 Introduction
Fractional calculus (FC) has become an alternative mathematical method to describe models with non-local behavior. The models represented by fractional differential equations describe real-world problems. Several applications replacing the integer temporal operator by an operator of fractional order are presented in [1–11]. In classical mechanics, the Lagrangian and Hamiltonian formulations describe dissipative systems. In this context, different authors have heeded to the Lagrangian and Hamiltonian approaches of fractional order [12–15].
Analytical solutions of the fractional derivatives are hardly available, in this sense, numerical methods has been reported in [16, 17]. In [18], using Liouville-Caputo derivatives the Euler-Lagrange equations corresponding an oscillator were stated as a series formulation; in [19] the fractional simple pendulum was studied using a fractional space representation. In [20], the fractional discrete Lagrangians were analyzed using the Riemann-Liouville fractional derivatives. The fractional Hamiltonians are non-local and they are associated with dissipative systems. Constructing a complete description for non-conservative systems can be viewed as one of the promising applications of FC. Other interesting applications were given in [21–24].
The Pais-Uhlenbeck oscillator (P-U) is a model for a higher derivative theory [25]. In the field of higher derivative theories was introduced in order to get rid of ultraviolet divergences [26]. In recent papers the P-U oscillator has been studied in the context of dynamical realizations of non-relativistic groups [27–30]. Baleanu et al. in [31] studied the fractional P-U oscillator based on the Riemann-Liouville fractional derivative, numerical results are obtained using the decomposition method via the Grünwald-Letnikov fractional operator and in [32] the authors study numerically the fractional Euler-Lagrange equation of the two-electric pendulum case via the Riemann-Liouville derivative and the numerical method used was based on the Grünwald-Letnikov definition of left and right fractional derivatives.
In various places, it is mentioned that the fractional derivative portrays the memory effect, which has not been proven in practice. Michele Caputo and Mauro Fabrizio presented a novel operator based on the exponential function with regular kernel [33–42], nevertheless, due to their properties, some researchers have concluded that this operator can be view as filter regulator [43]. To solve the problem, Atangana and Baleanu proposed two fractional operators with non-singular and non-local kernel, these novel operators preserve the benefits of the Caputo-Fabrizio operator [43–47].
This manuscript is focused on the fractional Euler-Lagrange equation of the P-U oscillator and the Hamiltonian of a two-electric pendulum model via the Caputo-Fabrizio operator and the new fractional operator based on the Mittag-Leffler function. We obtain numerical solutions of these representations and compare their effectiveness to describe real-world problems.
We organize this manuscript as follows: in Section 2, we outline the fundamentals to use the fractional operators. In Section 3, alternative representations of the Pais-Uhlenbeck oscillator model and the two-electric pendulum model are derived. Finally, in Section 3.2 are presented the conclusions.
2 Fractional operators
The Caputo-Fabrizio definition of a fractional operator is as follows [33, 34]:
where \(\frac{d^{\gamma}}{dt^{\gamma}}={}^{\mathrm{CF}}_{0}\mathcal{D}_{t}^{\gamma}\) is a Caputo-Fabrizio operator with respect to t, \(B(\gamma)\) is a normalization function such that \(B(0)=B(1)=1\), in this fractional derivative the exponential function aids to reduce the risk of singularity, furthermore, the derivative of a constant is equal to zero and the kernel does not have a singularity for \(t=\theta\).
The Laplace transform of (1) is defined as follows [33]:
for this representation in the time domain it is suitable to use the Laplace transform [33].
From this expression we have
The Atangana-Baleanu operator with fractional order in the Liouville-Caputo sense is given as
where \(B(\gamma)\) represents a normalization function [47].
The Laplace transform of (4) produces [43]
The Atangana-Baleanu fractional integral is defined as
3 Examples
3.1 Pais-Uhlenbeck oscillator
The model is characterized by a fourth-order differential equation, by a complex canonical transformation the P-U oscillator is reduced into two independent harmonic oscillators.
The fractional Lagrangian of this oscillator is defined as follows [31]:
The Euler-Lagrange equation is given as
Using (7) we can rewrite
Considering the Liouville-Caputo, Caputo-Fabrizio and Atangana-Baleanu-Caputo fractional derivatives we obtain numerical solutions for (9).
Space state representation
The model can be expressed as
Fractional space state representation
Let us obtain the representation of the system (10) by introducing the operator \({}^{\mathrm{CF}}_{0}{\mathcal{D}}_{t}^{\gamma}\) and \({}^{\mathrm{ABC}}_{0}{\mathcal{D}}_{t}^{\gamma}\) for each derivative.
Caputo-Fabrizio sense
In the Caputo-Fabrizio sense the P-U oscillator system (10) is given as
Applying the Laplace transform (2) on (11), we have
we transform equation (12) to
where \(A=\frac{s+\gamma(1-s)}{s}\).
Applying on both sides of equation (13) the inverse Laplace transform, we have
Iteratively equation (14) is represented as follows:
where
Now, we use the numerical approximation scheme recently developed in [37], where the stability and convergence analysis are discussed. The Adams-Moulton rule for the system (11) is given by
where
Numerical simulations
Figures 1(a), 1(b), 1(c), and 1(d) show the position \(\mathbf{x}(t)\) considering different values of \(\omega_{1}\), \(\omega_{2}\), and order γ, for all cases \(a=b=0\) and initial conditions equal to zero, the total simulation time considered is 5 seconds and the computational step \(1\times10^{-2}\). Similar results are obtained using the approximation (17).

Numerical evaluation of equation ( 15 ). (a) \(\omega_{1}=0.1\), \(\omega_{2}=1\); (b) \(\omega_{1}=0.6\), \(\omega_{2}=0.9\); (c) \(\omega_{1}=0.9\), \(\omega_{2}=0.4\), and (d) \(\omega_{1}=0.5\), \(\omega_{2}=0.5\). For all cases: a solid line corresponds to \(\gamma=1\), a dash line corresponds to \(\gamma=0.9\), a dot line corresponds to \(\gamma=0.8\), and a dash-dot line corresponds to \(\gamma=0.7\).
Atangana-Baleanu-Caputo sense
In the Atangana-Baleanu-Caputo sense the P-U oscillator system (10) is given by
Equation (18) is equivalent to the following:
where \(B=\frac{\gamma}{B(\gamma)+\Gamma(\gamma)}\). Equation (19) can be iteratively represented as follows:
where
When the number of iteration tends to infinity we obtain the exact solutions of (21).
Then we make use of the numerical approximation scheme recently developed in [44]. The numerical approximation of (6) is given by
where
using the above numerical scheme the system (18) is represented by
Numerical simulations
Figures 2(a), 2(b), 2(c), and 2(d) show the position \(\mathbf{{x}}(t)\) considering different values of \(\omega_{1}\), \(\omega_{2}\), and order γ, for all cases \(a=b=0\) and initial conditions equal to zero, the total simulation time considered is 5 seconds and computational step \(1\times10^{-2}\). Similar results are obtained using the approximation (21).

Numerical evaluation of equation ( 24 ). (a) \(\omega_{1}=0.1\), \(\omega_{2}=1\); (b) \(\omega_{1}=0.6\), \(\omega_{2}=0.9\); (c) \(\omega_{1}=0.9\), \(\omega _{2}=0.4\), and (d) \(\omega_{1}=0.5\), \(\omega_{2}=0.5\). For all cases: a solid line corresponds to \(\gamma=1\), a dash line corresponds to \(\gamma=0.9\), a dot line corresponds to \(\gamma=0.8\), and a dash-dot line corresponds to \(\gamma=0.7\).
3.2 Two-electric pendulum case
The authors in [32] studied numerically the fractional Euler-Lagrange equation of the two-electric pendulum model via Riemann-Liouville derivative. From this alternative representation we employ the Caputo-Fabrizio and Atangana-Baleanu-Caputo operators with fractional order to accurately describe this system.
The electric pendulum consists of two planar pendulums, each one have a link with length λ, and a mass m. The kinetic energy is
the two generalized variables are \(\mathbf{{q}}_{1}\) and \(\mathbf{{q}}_{2}\).
The potential energy is obtained by the sum of two terms; one is caused by the gravity force, the other is an electrostatic; thus the potential energy is given by
where g is the gravity constant and e is the electron charge. Now, the Lagrangian of the two-electric pendulum model is given by
Now, we can fractionalize the Lagrangian (27) as follows:
According to the Euler-Lagrange formulation for two generalized variables, we can obtain the fractional Lagrange model of the two-electric pendulum oscillator as follows:
The Lagrangian formulation is an explicit function of the coordinates \(\mathbf{{q}}_{i}\) and \(\dot{\mathbf{{q}}}_{i}\), however, the Hamilton formulation is an explicit function of the coordinates \(\mathbf {{q}}_{i}\) and \(\mathbf{{p}}_{i}\) are the generalized position and generalized momentum, respectively.
We can get the generalized momenta from the fractional Lagrangian of the system as follows:
where \(\mathcal{L}^{F}\) is the fractional Lagrangian of the system (28) and \(i=1,2\).
The generalized momenta are given by
In order to obtain the fractional Hamiltonian of the system, we use the Legendre transformation as follows:
Using equation (32), we can compute the fractional Hamiltonian of the system as
According to the Hamilton formulation for four generalize coordinates, we can obtain the fractional Hamilton model of the two-electric pendulum model as follows:
Caputo-Fabrizio sense
Now, we assume that the operator \({}_{0}\mathcal{D}_{t}^{\alpha}\) represents a fractional operator in the Caputo-Fabrizio sense \({}^{\mathrm{CF}}_{0}\mathcal{D}_{t}^{\alpha }\). Applying Laplace transform (2) on equation (34), we have
we transform equation (35) to
where \(A=\frac{s+\gamma(1-s)}{s}\).
Applying the inverse Laplace transform on both sides of equation (36), we have
Iteratively (37) is represented as follows:
where
Now, we use the numerical approximation scheme of the new Caputo-Fabrizio fractional operator recently developed in [37]. The Adams-Moulton rule for the system (34) is given by
where
Numerical simulations
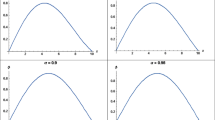
Figures 3(a), 3(b), 3(c), and 3(d) show \(q_{1}(t)\) and \(q_{2}(t)\) considering the following values: \(m=1~\mbox{Kg}\), \(\lambda=1~\mbox{m}\), \(d=1~\mbox{m}\) and different values of α, the total simulation time considered is 2 seconds, computational step \(1\times 10^{-5}\), and the following initial conditions: \(q_{1}(0)=0.01\) and \(q_{2}(0)=0.015\). Similar results are obtained using the approximation (40).

Numerical evaluation of equation ( 38 ) in Caputo-Fabrizio sense. (a) \(\gamma=1\); (b) \(\gamma=0.9\); (c) \(\gamma=0.85\), and (d) \(\gamma=0.8\).
Atangana-Baleanu-Caputo sense
Now, we assume that the operator \({}_{0}\mathcal{D}_{t}^{\gamma}\) represents a fractional operator in the Atangana-Baleanu-Caputo sense \({}^{\mathrm{ABC}}_{0}\mathcal{D}_{t}^{\gamma}\). Equation (34) is equivalent to the following:
where \(B=\frac{\gamma}{B(\gamma)+\Gamma(\gamma)}\). Equation (41) can be iteratively represented as follows:
where
when the number of iteration tends to infinity we obtain the exact solutions of (43).
Now, we use of the numerical approximation scheme of the new Atangana-Baleanu-Caputo fractional operator recently developed in [44]. Using the numerical approximation of the Atangana-Baleanu fractional integral (22) we have
Numerical simulations
Figures 4(a), 4(b), 4(c), and 4(d) show \(q_{1}(t)\) and \(q_{2}(t)\) considering the following values: \(m=1~\mbox{Kg}\), \(\lambda=1~\mbox{m}\), \(d=1~\mbox{m}\) and different values of α, the total simulation time considered is 2 seconds, the computational step \(1\times10^{-5}\), and the following initial conditions: \(q_{1}(0)=0.01\) and \(q_{2}(0)=0.015\). Similar results are obtained using the approximation (43).

Numerical evaluation of equation ( 44 ) in Atangana-Baleanu-Caputo sense. (a) \(\gamma=1\); (b) \(\gamma=0.9\); (c) \(\gamma=0.85\), and (d) \(\gamma=0.8\).
4 Conclusions
The modifications of the Pais-Uhlenbeck oscillator model and two-electric pendulum model were developed using different fractional operators with regular kernel. The alternative models were performed for different orders of the derivative and the classical cases are obtained numerically using the Euler numerical method. Based on concepts in the Caputo-Fabrizio and Atangana-Baleanu-Caputo sense, a derivation of the special solution was achieved via an iterative approach and using an iterative methodology via the Crank-Nicholson scheme. These operators are considered as filters, the first operator based on the exponential function with regular kernel and the second with Mittag-Leffler kernel. This fractional operator has a non-local, free singular kernel and the integral associated to this derivative is the average of the given function and its Riemann-Liouville fractional integral.
It was observed that as \(\gamma\rightarrow1\), the numerical solutions converge to those obtained by integer-order modeling. The numerical solutions of the fractional differential model describe long term memory effects (attenuation or dissipation); in the case when \(\gamma \leftarrow1\), the fractional temporal differentiation represents non-local displacement effects due to the dissipation of energy. Therefore, these dissipation effects are characterized by the fractional order γ, which is related to the displacement of the systems in fractal geometries.
The fractional operators used here reveal behaviors that cannot be obtained with the standard model. We can conclude that the Atangana-Baleanu Caputo fractional operator due to the Mittag-Leffler kernel is more suitable to model real-world complex problems than all existing fractional operators.
References
Baleanu, D, Diethelm, K, Scalas, E, Trujillo, JJ: Fractional Calculus Models and Numerical Methods. Series on Complexity, Nonlinearity and Chaos. World Scientific, Singapore (2012)
Podlubny, I: Fractional Differential Equations. Academic Press, New York (1999)
Kumar, S, Kumar, A, Baleanu, D: Two analytical methods for time-fractional nonlinear coupled Boussinesq-Burger’s equations arise in propagation of shallow water waves. Nonlinear Dyn. 85, 699-715 (2016)
Yin, XB, Kumar, S, Kumar, D: A modified homotopy analysis method for solution of fractional wave equations. Adv. Mech. Eng. 7(12), 1-8 (2015)
Gómez-Aguilar, JF, Baleanu, D: Solutions of the telegraph equations using a fractional calculus approach. Proc. Rom. Acad., Ser. A 1(15), 27-34 (2014)
Yao, JJ, Kumar, A, Kumar, S: A fractional model to describe the Brownian motion of particles and its analytical solution. Adv. Mech. Eng. 7(12), 1-11 (2015)
Gómez-Aguilar, JF, Razo-Hernández, R, Granados-Lieberman, D: A physical interpretation of fractional calculus in observables terms: analysis of the fractional time constant and the transitory response. Rev. Mex. Fis. 60, 32-38 (2014)
Kumar, S, Kumar, A, Argyros, IK: A new analysis for the Keller-Segel model of fractional order. Numer. Algorithms (2016). doi:10.1007/s11075-016-0202-z
Gómez-Aguilar, JF, Miranda-Hernández, M, López-López, MG, Alvarado-Martínez, VM, Baleanu, D: Modeling and simulation of the fractional space-time diffusion equation. Commun. Nonlinear Sci. Numer. Simul. 30(1-3), 115-127 (2016)
Kumar, S, Kumar, D, Singh, J: Fractional modelling arising in unidirectional propagation of long waves in dispersive media. Adv. Nonlinear Anal. (2016). doi:10.1515/anona-2013-0033
Zhang, Y, Meerschaert, MM, Neupauer, RM: Backward fractional advection dispersion model for contaminant source prediction. Water Resour. Res. 52(4), 2462-2473 (2016)
Baleanu, D, Trujillo, JJ: A new method of finding the fractional Euler-Lagrange and Hamilton equations within Caputo fractional derivatives. Commun. Nonlinear Sci. Numer. Simul. 15, 1111-1115 (2010)
Petras, I: Fractional-Order Nonlinear Systems: Modeling, Analysis and Simulation. Springer, Berlin (2011)
David, SA, Valentim, CA Jr.: Fractional Euler-Lagrange equations applied to oscillatory systems. Mathematics 3(2), 258-272 (2015)
Elmas, A, Ozkol, I: Classical and fractional-order analysis of the free and forced double pendulum. Engineering 2(12), 935 (2010)
Podlubny, I: Matrix approach to discrete fractional calculus. Fract. Calc. Appl. Anal. 3(4), 359 (2010)
Podlubny, I, Chechkin, AV, Skovranek, T, Chen, YQ, Vinagre, B: Matrix approach to discrete fractional calculus II: partial fractional differential equations. J. Comput. Phys. 228(8), 3137-3153 (2009)
Baleanu, D, Trujillo, JJ: On exact solutions of a class of fractional Euler-Lagrange equations. Nonlinear Dyn. 52(4), 331-335 (2008)
Muslih, SI, Baleanu, D: Fractional Euler-Lagrange equations of motion in fractional space. J. Vib. Control 13(9-10), 1209-1216 (2007)
Baleanu, D, Muslih, SI, Rabei, EM: On fractional Euler-Lagrange and Hamilton equations and the fractional generalization of total time derivative. Nonlinear Dyn. 53(1-2), 67-74 (2008)
Baleanu, D, Agrawal, OP: Fractional Hamilton formalism within Caputo’s derivative. Czechoslov. J. Phys. 56(10-11), 1087-1092 (2006)
Rabei, EM, Nawafleh, KI, Hijjawi, RS, Muslih, SI, Baleanu, D: The Hamilton formalism with fractional derivatives. J. Math. Anal. Appl. 327(2), 891-897 (2007)
Muslih, SI, Baleanu, D: Formulation of Hamiltonian equations for fractional variational problems. Czechoslov. J. Phys. 55(6), 633-642 (2005)
Baleanu, D: Fractional Hamiltonian analysis of irregular systems. Signal Process. 86(10), 2632-2636 (2006)
Pais, A, Uhlenbeck, GE: On field theories with non-localized action. Phys. Rev. 79(1), 145-165 (1950)
Thirring, W: Regularization as a consequence of higher order equations. Phys. Rev. 77, 570 (1950)
Andrzejewski, K, Galajinsky, A, Gonera, J, Masterov, I: Conformal Newton-Hooke symmetry of Pais-Uhlenbeck oscillator. Nucl. Phys. B 885, 150-162 (2014)
Galajinsky, A, Masterov, I: On dynamical realizations of l-conformal Galilei and Newton-Hooke algebras. Nucl. Phys. B 896, 244-254 (2015)
Andrzejewski, K: Conformal Newton-Hooke algebras, Niederer’s transformation and Pais-Uhlenbeck oscillator. Phys. Lett. B 738, 405-411 (2014)
Masterov, I: An alternative Hamiltonian formulation for the Pais-Uhlenbeck oscillator. Nucl. Phys. B 902, 95-114 (2016)
Baleanu, D, Petras, I, Asad, JH, Velasco, MP: Fractional Pais-Uhlenbeck oscillator. Int. J. Theor. Phys. 51(4), 1253-1258 (2012)
Baleanu, D, Asad, JH, Petras, I: Fractional-order two-electric pendulum. Rom. Rep. Phys. 64(4), 907-914 (2012)
Caputo, M, Fabricio, M: A new definition of fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 1(2), 73-85 (2015)
Lozada, J, Nieto, JJ: Properties of a new fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 1(2), 87-92 (2015)
Alkahtani, BST, Atangana, A: Chaos on the Vallis model for El Niño with fractional operators. Entropy 18(4), 100 (2016)
Atangana, A, Baleanu, D: Caputo-Fabrizio derivative applied to groundwater flow within confined aquifer. J. Eng. Mech. (2016). doi:10.1061/(ASCE)EM.1943-7889.0001091
Atangana, A, Nieto, JJ: Numerical solution for the model of RLC circuit via the fractional derivative without singular kernel. Adv. Mech. Eng. 7(10), 1-6 (2015)
Gómez-Aguilar, JF, Yépez-Martínez, H, Calderón-Ramón, C, Cruz-Orduña, I, Escobar-Jiménez, RF, Olivares-Peregrino, VH: Modeling of a mass-spring-damper system by fractional derivatives with and without a singular kernel. Entropy 17(9), 6289-6303 (2015)
Atangana, A, Alkahtani, BST: New model of groundwater flowing within a confine aquifer: application of Caputo-Fabrizio derivative. Arab. J. Geosci. 9(1), 1-6 (2016)
Gómez-Aguilar, JF, López-López, MG, Alvarado-Martínez, VM, Reyes-Reyes, J, Adam-Medina, M: Modeling diffusive transport with a fractional derivative without singular kernel. Phys. A, Stat. Mech. Appl. 447, 467-481 (2016)
Atangana, A, Alkahtani, BST: Extension of the resistance, inductance, capacitance electrical circuit to fractional derivative without singular kernel. Adv. Mech. Eng. 7(6), 1-6 (2015)
Caputo, M, Fabrizio, M: Applications of new time and spatial fractional derivatives with exponential kernels. Prog. Fract. Differ. Appl. 2, 1-11 (2016)
Atangana, A, Baleanu, D: New fractional derivatives with nonlocal and non-singular kernel: theory and application to heat transfer model. Therm. Sci. 20(2), 763-769 (2016)
Alkahtani, BST: Chua’s circuit model with Atangana-Baleanu derivative with fractional order. Chaos Solitons Fractals 89, 547-551 (2016)
Coronel-Escamilla, A, Gómez-Aguilar, JF, López-López, MG, Alvarado-Martínez, VM, Guerrero-Ramírez, GV: Triple pendulum model involving fractional derivatives with different kernels. Chaos Solitons Fractals 91, 248-261 (2016)
Algahtani, OJJ: Comparing the Atangana-Baleanu and Caputo-Fabrizio derivative with fractional order: Allen Cahn model. Chaos Solitons Fractals 89, 552-559 (2016)
Atangana, A, Koca, I: Chaos in a simple nonlinear system with Atangana-Baleanu derivatives with fractional order. Chaos Solitons Fractals 89, 447-454 (2016)
Acknowledgements
The authors appreciate the constructive remarks and suggestions of the anonymous referees, which helped to improve the paper. We would like to thank Mayra Martínez for the interesting discussions. Antonio Coronel Escamilla acknowledges the support provided by CONACYT through the assignment doctoral fellowship. José Francisco Gómez Aguilar acknowledges the support provided by CONACYT: cátedras CONACYT para jovenes investigadores 2014.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally in this article. They read and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Coronel-Escamilla, A., Gómez-Aguilar, J.F., Baleanu, D. et al. Formulation of Euler-Lagrange and Hamilton equations involving fractional operators with regular kernel. Adv Differ Equ 2016, 283 (2016). https://doi.org/10.1186/s13662-016-1001-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-016-1001-5