
Abstract
In present work, in order to avoid the spread of disease, the impulse control strategy is implemented to keep the density of infections at a low level. The SIR epidemic model with resource limitation including a nonlinear impulsive function and a state-dependent feedback control scheme is proposed and analyzed. Based on the qualitative properties of the corresponding continuous system, the existence and stability of positive order-k (\(k\in\mathbf{Z}^{+}\)) periodic solution are investigated. By using the Poincaré map and the geometric method, some sufficient conditions for the existence and stability of positive order-1 or order-2 periodic solution are obtained. Moreover, the sufficient conditions which guarantee the nonexistence of order-k (\(k\geq3\)) periodic solution are given. Some numerical simulations are carried out to illustrate the feasibility of our main results.
Similar content being viewed by others


1 Introduction
Infectious diseases have had a tremendous influence on human life and have brought huge panic and disaster to mankind once out of control from antiquity to the present. Every year millions of human beings suffer from or die of various infectious diseases. For example, measles, dengue, tuberculosis, cholera, Ebola and avian influenza have had a tremendous influence on human health during the last few years. Therefore, epidemiological modeling of infectious disease transmission has an increasing influence on the theory and practice of disease management and control. It is well known that one of the most important concerns in the analysis of mathematical modeling of the spread of infectious diseases is the efficacy of vaccination programmes. In Central and South America [1, 2] and UK [3], vaccination strategies have a positive effect on the prevention of diseases such as measles, tetanus, diphtheria, pertussis, and tuberculosis. Long-term clinical data show that the vaccination strategies lead to infectious disease eradication if the proportion of the successfully vaccinated individuals is larger than a certain critical value, for example, approximately equal to 95% for measles. The effectiveness of vaccination has been widely studied and verified for the influenza vaccine [4], the human papilloma virus (HPV) vaccine [5], the chicken pox vaccine [6], and others. Generally, there are two types of vaccination strategies: continuous vaccination strategy (CVS) and pulse vaccination strategy (PVS). For certain kinds of infectious diseases, PVS is more affordable and easier to implement than CVS. Recently, PVS has gained prominent achievement as a result of its highly successful application in the control of poliomyelitis and measles throughout Central and South America. In viewing of this, epidemiological models with PVS have been set up and investigated in many literature works (see, e.g., [7–13] and the references therein). Particularly, Agur et al. [7] first proposed a mathematical model with PVS, which consists of periodical repetitions of impulsive vaccinations of all the age cohorts in a population, which has been confirmed as an important and effective strategy for the elimination of infectious diseases.
In a real world application, however, the eradication of a disease is sometimes difficult both practically and economically in a short time. In order to prevent and control the spread of an infectious disease, impulsive vaccination and pulse treatment are important and effective methods. So far, it is necessary to keep the density of infections at a low level to avoid the spread of the disease. In many practical problems, impulse control strategy often occurs at state-dependent time, and it is more reasonable to take a strategy of state-dependent feedback control to model the issues of real world phenomena. Recently, the state-dependent feedback control, which is modeled by the impulsive semi-dynamic systems, has become a hot topic and has been applied in other fields and science [14–18], and it suggests that the control tactics should only be applied once the states of model reach a prescribed given threshold.
Following this idea, many epidemic models with state-dependent feedback control (including PVS and pulse treatment strategy (PTS)) have been proposed and analyzed by a number of authors in recent years. The SIR model with state-dependent PVS and PTS has been studied by Tang et al. [14] and later by Nie et al. [19]. Further, Nie et al. [20] proposed the SIRS model with state-dependent PVS and PTS, and analyzed the existence and stability of the periodic solution using the Poincaré map and the method of qualitative analysis. In these epidemic models with state-dependent pulse control strategies, it is usually assumed that the pulse vaccination rate p of the susceptibles and the pulse treatment rate q of the infectives are constants, which implies that the medical resources such as drugs, vaccines, hospital beds are very sufficient for infectious disease. In reality, however, every community or country has an appropriate or limited capacity for treatment, especially for emerging infectious diseases, and so understanding resource limitation is critical to effective management.
To the best of our knowledge, no work has been done for the effects of resource limitation on the SIR model with state-dependent PTS. In order to investigate the effect of limited vaccine and treatment availability on the spread of infectious disease, a saturation phenomenon of limited medical resources is considered. That is, we will study the dynamic behavior of the SIR epidemic model with state-dependent nonlinear PTS. This paper is structured as follows. In Section 2, the SIR epidemic model with resource limitation including state-dependent feedback control strategies and nonlinear impulsive function is constructed, some basic definitions, preliminaries and lemmas are given. In Section 3, we discuss the SIR model with the nonlinear impulsive vaccination as state-dependent feedback control, the existence and stability of positive periodic solution of this model. Finally, some numerical simulations are given to illustrate our results and suitability of state feedback control.
2 Model formulation and preliminaries
Recently, Zhou et al. [21] introduced a new continually differentiable treatment function \(h(I)=\alpha I/(\omega+I)\) to characterize the saturation phenomenon of the limited medical resources and carefully investigated the dynamics of the following SIR model:
where \(S(t)\), \(I(t)\) and \(R(t)\) denote the numbers of susceptible, infective and recovered individuals at time t, respectively. Λ is the recruitment rate of population, γ is the natural recovery rate, and ϵ is the disease-related mortality. The incidence rate \(\beta S(t)I(t)/(1+kI(t))\) of saturated type reflects the ‘psychological’ effect or inhibition effect, α represents the maximal medical resources supplied per unit time and ω is half-saturation constant. All parameters shown in model (2.1) are nonnegative constants.
We assume, throughout this paper, that \(\epsilon=0\). That is to say, the disease-related mortality is so very small that can be ignored. Motivated by the previous works [14, 15, 19, 20, 22], we propose a state-dependent nonlinear pulse vaccination for the susceptible at control threshold value. That is, when the number of the infected individuals reaches the higher hazardous threshold value RL at time \(t_{i}(\mathit{RL})\) at the ith time, vaccination is taken and the number of susceptible and recovered individuals turns very suddenly to a great degree to \((1-p(t))S(t_{i}(\mathit{RL}))\) and \(R(t_{i}(\mathit{RL}))+p(t)S(t_{i}(\mathit{RL}))\), respectively, where \(p(t)\in(0,1)\) is the vaccination rate.
Typically, the previous works always assume that the vaccination rate \(p(t)\) is a constant \(p\in(0,1)\) proportional to the number of susceptibles. But there is a limit to how fast the medical team can find and handle each susceptible for some emerging infectious diseases, that is, vaccination is often restricted by limited medical resources. The vaccination rate \(p(t)\) always has some saturation effect and can be expressed as a saturation function as follows [23]:
where \(p_{\max}\) is the maximum pulse vaccination proportion and θ is the half-saturation constant. Based on model (2.1) and the assumption \(\epsilon=0\), we consider the following model with the continuous treatment control strategy and the nonlinear impulsive vaccination as state-dependent feedback control.
where the initial condition \((S(0), I(0), R(0) )\in {\mathbb {R}}^{3}_{+}=\{ (x_{1},x_{2},x_{3})|x_{i}\geq0\}\) and \(I(0)<\mathit{RL}\). Let \(G(\mathit{RL})=(1+k\mathit{RL})/\beta(d+\gamma+\alpha/(\omega+\mathit{RL})) \), in which \(G(\mathit{RL})\) as a function depends on the threshold RL, it is determined by the intersection of the horizontal isocline \(\beta S/(1+kI(t))-(d+\gamma)-\alpha/(\omega+I)=0 \) and the line \(I(t)=\mathit{RL} \), the parameter definitions of model (2.2) are summarized in Table 1.
Let the total population number of model (2.2) without impulsive effect be \(N(t)=S(t)+I(t)+R(t)\), which satisfies
It is clear that \(N(t)=\Lambda/d\) is a solution of Eq. (2.3), that is, \(S(t)+I(t)+R(t)=\Lambda/d\), and for any \(N(t_{0})\geq0\), we have
Thus, the plane \(S(t)+I(t)+R(t)=\Lambda/d\) is an invariant manifold of model (2.2) without impulsive effect. By the biological background of model (2.2), we only consider model (2.2) in the biological meaning region \(\Omega=\{(S,I,R)| 0\leq S+I+R\leq\Lambda/d\}\). Obviously, due to Lakshmikantham et al. [24] and Bainov and Simeonov [25], the global existence and uniqueness of solutions of model (2.2) are guaranteed by the smoothness properties of the right sides of model (2.2).
It is then seen that the initial value problems for models (2.2) are biologically well posed in the sense that the trajectories of model (2.2) with the initial condition \((S(t_{0}),I(t_{0}), R(t_{0}))\in {\mathbb {R}}_{3}^{+}\) are positivity preserving.
Lemma 2.1
Suppose that \((S(t),I(t),R(t))\) is a solution of model (2.2) with the initial condition \((S(t_{0}),I(t_{0}),R(t_{0}))\in {\mathbb {R}}_{+}^{3}\). Then \((S(t),I(t),R(t))\in {\mathbb {R}}_{+}^{3}\) for all \(t\geq0\).
Proof
For any initial value \((S(t_{0}),I(t_{0}),R(t_{0}))\in {\mathbb {R}}_{+}^{3}\), we discuss the following two possibilities given by the number of possible contacts between the solution \((S(t),I(t),R(t))\) and the control line \(I=\mathit{RL}\).
-
(a)
The solution intersects with \(I=\mathit{RL}\) infinitely many times, at time instances \(t_{k}\), \(k=1,2,\ldots\) , and \(t_{k}\rightarrow\infty\). In this case, if the conclusion of Lemma 2.1 is false, we then obtain that there exists a positive integer n and \(t^{*}\in (t_{n-1},t_{n})\) such that \(\min\{S(t^{*}),I(t^{*}),R(t^{*})\}=0\), and \(S(t)>0\), \(I(t)>0\), \(R(t)>0\) for all \(t\in[t_{0}, t^{*})\).
The first possibility is that \(S(t^{*})=0\), \(I(t^{*})>0\), \(R(t^{*})>0\). For this case, it follows from the first and fourth equations of model (2.2) that
$$S \bigl(t^{*} \bigr)>\prod_{i=1}^{n-1} \biggl(1- \frac{p_{\max}S(t_{i})}{S(t_{i})+\theta } \biggr)S(t_{0})\exp \biggl(- \int_{t_{0}}^{t^{*}} \biggl(\frac{\beta I(\tau )}{1+kI(\tau)+d}\,\mathrm {d}\tau \biggr) \biggr)>0, $$which contradicts the fact \(S(t^{*})=0\).
The second possibility is that \(S(t^{*})>0\), \(I(t^{*})=0\), \(R(t^{*})>0\). For this case, it follows from the second and fifth equations of model (2.2) that
$$I \bigl(t^{*} \bigr)=I(t_{i})\exp \biggl(- \int_{t_{0}}^{t^{*}} \biggl(d+\gamma+\varepsilon+ \frac {\alpha}{\omega+I(\tau)} \biggr)\,\mathrm {d}\tau \biggr)>0 , $$which contradicts the fact \(I(t^{*})=0\), where \(I(t_{1})=\cdots =I(t_{n-1})=\mathit{RL}\), \(i=0,1,\ldots,n-1\).
The third possibility is that \(S(t^{*})>0\), \(I(t^{*})>0\), \(R(t^{*})=0\). For this case, it follows from the third and sixth equations of model (2.2) that
$$R \bigl(t^{*} \bigr)>R(t_{0})\exp \bigl(-d \bigl(t^{*}-t_{0} \bigr) \bigr)+\sum_{i=1}^{n-1} \biggl( \frac{p_{\max }S^{2}(t_{i})}{S(t_{i})+\theta}\exp \bigl(-d \bigl(t^{*}-t_{i} \bigr) \bigr) \biggr)>0, $$which contradicts \(R(t^{*})=0\).
-
(b)
The solution intersects with \(I=\mathit{RL}\) finitely many times. In this case, since the endemic equilibrium \((S_{*},I_{*},R_{*})\) is globally asymptotically stable, so \(S(t)>0\), \(I(t)>0\), and \(R(t)>0\) for all \(t\geq0\).
□
In the following, we start by introducing some definitions related to impulsive semi-dynamic systems, which are used in this work. We consider the following generalized planar impulsive semi-dynamic systems with state-dependent feedback control.
where \((x,y)\in {\mathbb {R}}^{2}\), we denote \(x^{+}=x(t^{+})\) and \(y^{+}=y(t^{+})\) for simplicity. f, g, ξ and η are continuous functions mapping \({\mathbb {R}}^{2}\) into \({\mathbb {R}}\), \(\mathcal{M}\subset {\mathbb {R}}^{2}\) denotes the impulsive set. According to the denotations in [26–28], for any point \(z(x,y)\in\mathcal{M}\), the map or impulsive function \(\mathcal {I}:{\mathbb {R}}^{2}\rightarrow {\mathbb {R}}^{2}\) is defined as \(\mathcal{I}(z)=z^{+}=(x^{+},y^{+})\in {\mathbb {R}}^{2}\), \(x^{+}=x+\xi(x,y)\), \(y^{+}=y+\eta(x,y)\), and \(z^{+}\) is called an impulsive point of z. Let \(\mathcal{N}=\mathcal{I}(\mathcal{M})\) be the phase set (i.e., for any \(z(x,y) \in\mathcal{M}\), \(\mathcal {I}(z)=z^{+}=(x^{+},y^{+})\in\mathcal{N}\)), \(\mathcal{M}\cap\mathcal {N}=\emptyset\). Model (2.4) is generally known as a planar impulsive semi-dynamic model.
Let \((X,\Pi, {\mathbb {R}}_{+})\) or \((X,\Pi)\) be a semi-dynamic model, where \(X=R_{+}^{2}\) is a metric space, and \({\mathbb {R}}_{+}\) is the set of all nonnegative reals. For any \(z\in X\), the function \(\Pi_{z}:{\mathbb {R}}_{+}\rightarrow X\) defined by \(\Pi_{z}(t)=\Pi(z,t)\) is clearly continuous such that \(\Pi(z,0)=z\) for all \(z\in X\), and \(\Pi(\Pi(z,t),s)=\Pi(z,t+s)\) for all \(z\in X\) and \(t,s\in {\mathbb {R}}_{+}\). The set \(C^{+}(z)=\{\Pi(x,t)|t\in {\mathbb {R}}\}\) is called the positive orbit of Z. For any set \(\mathcal{M}\subset X\), let \(\mathcal {M}^{+}(z)=C^{+}(z)\cap\mathcal{M}-{z}\), where \(G(z,t)=\{w\in X|\Pi(w,t)=z\} \) is the attainable set of z at \(t\in {\mathbb {R}}_{+}\). Based on the above notations, we need the following definitions and lemma.
Definition 2.1
An impulsive semi-dynamic model \((X,\Pi; \mathcal{M}, \mathcal{I})\) consists of a continuous semi-dynamic model \((X,\Pi)\) together with a nonempty closed subset \(\mathcal{M}\) ( or impulsive set) of \({\mathbb {R}}^{2}\) and a continuous function \(\mathcal{I}: \mathcal{M}\rightarrow X\) such that the following property holds: No point \(z\in X\) is a limit point of \(\mathcal{M}(z)\); \(\{t|G(z,t)\cap\mathcal{M}\neq\emptyset\}\) is a closed subset of \({\mathbb {R}}\).
Throughout the paper, we denote the points of discontinuity of \(\Pi_{z}\) by \({z_{n}^{+}}\) and define a function \(\Phi:X\rightarrow {\mathbb {R}}_{+}\cup{\infty}\) for any \(z\in X\). If \(\mathcal{M}^{+}(z)=\emptyset\), we set \(\Phi (z)=\infty\); otherwise, \(\mathcal{M}^{+}(z)\neq\emptyset\), and we set \(\Phi(z)=s\), where \(\Pi(z,t)\notin\mathcal{M}\) for \(0< t< s\) but \(\Pi (z,s)\in\mathcal{M}\).
Definition 2.2
A trajectory \(\Pi_{z}\) in \((X,\Pi,\mathcal{M},\mathcal{I})\) is said to be periodic of period \(T_{k}\) and order k if there exist nonnegative integers \(m\geq0\) and \(k\geq1\) such that k is the smallest integer for which \(z_{m}^{+}=z_{m+k}^{+}\) and \(T_{k}=\sum_{i=m}^{m+k-1}\Phi(z_{i})= \sum_{i=m}^{m+k-1}s_{i}\).
For more details on the concepts and properties of impulsive semi-dynamic model (2.4), see [24–26, 28]. For simplicity, we denote a periodic trajectory of period \(T_{k}\) and order-k by an order-k periodic solution. The local stability of an order-k periodic solution can be determined by using the following analogue of Poincaré criterion [25].
Lemma 2.2
Analogue of Poincaré criterion [25]
Let \(\varphi(x,y)\) be a sufficiently smooth function with grad \(\varphi (x,y)\neq0\), and we denote \(\varphi(x,y)\neq0\) as \((x,y)\notin\mathcal {M}\) and \(\varphi(x,y)=0\) as \((x,y)\in\mathcal{M}\). The order-k periodic solution \((\phi(t), \psi(t))\) of model (2.4) is orbitally asymptotically stable and enjoys the property of asymptotic phase if the Floquet multiplier μ satisfies the condition \(\vert \mu \vert <1\), where
and f, g, \({\partial\xi}/{\partial x}\), \({\partial\xi}/{\partial y}\), \({\partial\eta}/{\partial x}\), \({\partial\eta}/{\partial y}\), \({\partial\varphi}/{\partial x}\) and \({\partial\varphi}/{\partial y}\) are calculated at the point \((\phi(\tau_{k}),\psi(\tau_{k}))\), \(f_{+}=f(\phi(\tau^{+}_{k}),\psi(\tau^{+}_{k}))\), \(g_{+}=g(\phi(\tau^{+}_{k}),\psi (\tau^{+}_{k}))\) and \(\tau_{k}\) \((k\in\mathbf{N})\) is the time of the kth jump, \(1\leq k\leq n\), n being the total number of impulsive perturbations in \([0,T]\).
It follows from Zhou and Fan [21] that the disease-free equilibrium of the form \(E_{0}=(\Lambda/d,0,0)\) is globally asymptotically stable if \(\mathcal {R}_{0}<1\), and the endemic equilibria \(E^{*}(S_{*},I_{*},R_{*})\) of model (2.1) are globally asymptotically stable if \(\mathcal {R}_{0}>1\) and \(\alpha\leq\omega^{2}(\beta+dk)+\omega ^{2}k(d+\gamma+\varepsilon)+\omega(2d+\alpha k)\), where
and
For model (2.2), we assume that the conditions \(\mathcal {R}_{0}>1\) and \(\alpha\leq\omega^{2}(\beta+dk)+\omega^{2}k(d+\gamma)+\omega (2d+\alpha k)\) hold. That is to say, model (2.2) without impulsive effects has a unique globally asymptotically stable endemic equilibrium \((S_{*},I_{*}, R_{*})\).
Note that the removed individuals \(R(t)\) have no effect on the dynamic behaviors of susceptibles and infectives of model (2.2). Therefore, we consider the reduced model
In model (2.5), we have the impulsive set \(\mathcal{M}=\{(S,I)\in {\mathbb {R}}_{+}^{2}|S\geq G(\mathit{RL}) \text{ and } I=\mathit{RL}\}\), and for any \((S, I)\in\mathcal{M}\), we have the continuous function \(\mathcal{I}(S,\mathit{RL})= (S-p_{\max}S^{2}/(S+\theta),\mathit{RL} )\in {\mathbb {R}}_{+}^{2}\). It follows that the phase set is \(\mathcal{N}=\mathcal{I}(\mathcal{M})=\{(S^{+},I^{+})\in {\mathbb {R}}_{+}^{2}|G(\mathit{RL})-p_{\max }G^{2}(\mathit{RL})/(G(\mathit{RL})+\theta)< S^{+}< G(\mathit{RL}), I^{+}=\mathit{RL}\}\). It is clear that the total population size of model (2.5) tends to a constant \(\Lambda/d\) as t tends to infinity, by a biological point of view, we focus on the region \(\Omega=\{ (S,I)|S>0,\mathit{RL}\geq I>0, S+I\leq\Lambda/d\}\) to investigate model (2.5).
In order to address the dynamic behavior of model (2.5), the Poincaré map is constructed by the impulsive points on a phase set. Define two sections as follows:
Choose section \(\Sigma_{p_{\max}}\) as a Poincaré section. Suppose that point \(P_{n}^{+}=(S_{n}^{+}, \mathit{RL})\) lies in section \(\Sigma_{p_{\max}}\), and the trajectory \(\Pi_{P_{n}^{+}}=\{(S(t),I(t))\in\Omega| G(\mathit{RL})>S(t_{n}^{+})=S_{n}^{+},I(t_{n}^{+})=\mathit{RL}, t\geq t_{n}^{+}\}\) initiating from \(P_{n}^{+}\) will reach section \(\Sigma_{\mathit{RL}}\) at point \(P_{n+1}=(S_{n+1}, \mathit{RL})\) in a finite time, where \(S_{n+1}\) can be only determined by \(S_{n}^{+}\), which can be expressed by \(S_{n+1}=f(S_{n}^{+})\). Clearly, a function f is continuously differentiable according to the Cauchy-Lipschitz theorem, and f is decreasing on \((0,G(\mathit{RL}))\) by the geometrical construction of the phase space of model (2.5). We assume that \(p_{\max}\in(p^{*},1)\), in which
depends on the threshold RL as a function \(\mathcal{P}(\mathit{RL})\) is a sufficient condition for any point lying in section \(\Sigma_{\mathit{RL}}\) to map to section \(\Sigma_{p_{\max}}\) after once impulsive effect. One time state-dependent feedback action is implemented at point \(P_{n+1}\) such that it jumps to point \(P_{n+1}^{+}=(S_{n+1}^{+},\mathit{RL})\) with \(S_{n+1}^{+}=(1-p_{\max}S_{n+1}/(S_{n+1}+\theta))S_{n+1}\) on section \(\Sigma_{p_{\max}}\), where point \(P_{n+1}^{+}\) is the impulsive point of \(P_{n+1}\) after one time impulsive effect. Therefore, we defined a Poincaré map of section \(\Sigma_{p_{\max}}\) as follows:
It is easy to see that the function \(\mathcal{F}_{1}:\Sigma_{p_{\max }}\rightarrow\Sigma_{p_{\max}}\) is monotone decreasing in the section \(\Sigma_{p_{\max}}\). Thus, we will discuss the existence and stability of positive periodic solutions of model (2.5) using the Poincaré map (2.7).
3 Main results
From the assumption conditions of model (2.2), we know that the endemic equilibria \(E^{*}(S_{*},I_{*})\) is a globally asymptotically stable node if \(\mathcal{R}_{0}>1\) (see Figure 1). From the vector field of model (2.5) without impulsive effect, it is easy to see that the trajectory with the initial condition \((S_{0},I_{0})\in\Sigma _{p_{\max}}\) will reach section \(\Sigma_{\mathit{RL}}\) infinitely many times when \(\mathit{RL}\leq I_{*}\). However, if \(I_{*}<\mathit{RL}\), then the trajectory with the initial condition \((S_{0},I_{0})\in\Sigma_{p_{\max}}\) does not reach \(\Sigma_{\mathit{RL}}\) or tend to the endemic equilibrium \((S_{*},I_{*})\) after reaching \(\Sigma_{\mathit{RL}}\) finitely many times. So, next, we will discuss the existence and stability of positive periodic solution of model (2.5) for two cases: (1) \(\mathit{RL}\leq I_{*}\); (2) \(I_{*}<\mathit{RL}\), respectively.

The vector field plot of model ( 2.5 ) without pulse effects. The equilibrium point \(E_{*}(S_{*},I_{*})\) is a stable node.
3.1 The case of \(\mathit{RL}\leq I_{*}\)
Theorem 3.1
For the case \(\mathit{RL}\leq I_{*}\), if \(p_{\max}\in(p^{*},1)\), then model (2.5) has a positive order-1 periodic solution.
Proof
For any \(p_{\max}\in(p^{*},1)\), we can choose small enough positive constants \(\varepsilon_{1}\) and δ such that
In view of the vector field of model (2.5), suppose that the trajectory \(\Pi_{P_{0}^{+}}\) starting from the initial point \(P_{0}^{+}(G(\mathit{RL})-\varepsilon_{1},\mathit{RL})\in\Sigma_{p_{\max}}\) will reach section \(\Sigma_{\mathit{RL}}\) at the point \(P_{1}(G(\mathit{RL})+\mu_{1},\mathit{RL})\) in a finite time. Suppose that \(\mu_{1}\leq\delta\), then point \(P_{1}\) maps to point \(P_{1}^{+}(G(\mathit{RL})-\varepsilon_{2}, \mathit{RL})\) after one time impulsive effect. From the third equation of model (2.5) and condition (3.1), we have
It implies that \(\varepsilon_{1}<\varepsilon_{2}\) and point \(P_{1}^{+}\) is on the left of point \(P_{0}^{+}\). Thus, from (2.7), we have \(G(\mathit{RL})-\varepsilon_{2}=\mathcal{F}_{1}(G(\mathit{RL})- \varepsilon_{1},p_{\max}, \theta)\)
Conversely, \(\mu_{1}>\delta\). There is a positive constant \(\varepsilon_{1}^{*}<\varepsilon_{1}\) such that the trajectory \(\Pi_{\widehat{P}_{0}^{+}}\) starting from the initial point \(\widehat{P}_{0}^{+}(G(\mathit{RL})-\varepsilon_{1}^{*},\mathit{RL})\) will reach section \(\Sigma _{\mathit{RL}}\) at point \(\widehat{P}_{1}(G(\mathit{RL})+\delta,\mathit{RL})\) in a finite time, and then point \(\widehat{P}_{1}\) maps to point \(\widehat {P}_{1}^{+}(G(\mathit{RL})-\varepsilon_{2}^{*},\mathit{RL})\). From the third equation of model (2.5) and (3.1), we have
It implies that \(\varepsilon_{1}^{*}<\varepsilon_{2}^{*}\) and point \(\widehat {P}_{1}^{+}\) is on the left of point \(\widehat{P}_{0}^{+}\). It follows from (2.7) that we have \(G(\mathit{RL})-\varepsilon_{2}^{*}=\mathcal {F}_{1}(G(\mathit{RL})-\varepsilon_{1}^{*},p_{\max}, \theta)\) and
On the other hand, for any \(p_{\max}\in(p^{*},1)\), we can choose small enough positive constant η such that
Suppose that the trajectory \(\Pi_{Q_{0}^{+}}\) from the initial point \(Q_{0}^{+}(\eta,\mathit{RL})\) reaches section \(\Sigma_{\mathit{RL}}\) at point \(Q_{1}(S_{1},\mathit{RL})\) in a finite time, next jumps to point \(Q_{1}(S_{1}^{+},\mathit{RL})\) on section \(\Sigma _{p_{\max}}\) due to the impulsive effects. From the third equation of model (2.5) and \(p_{\max}\in(p^{*},1)\), we have \(\eta < S_{1}^{+}< G(\mathit{RL})\). It implies that point \(Q_{1}^{+}\) is on the right of point \(Q_{0}^{+}\). Therefore, from (2.7) we have \(S_{1}^{+}=\mathcal {F}_{1}(\eta,p_{\max}, \theta)\) and
By (3.2), (3.3) and (3.5), it follows that the Poincaré map (2.7) has a fixed point, that is, model (2.5) has a fixed point, thus, model (2.5) has a positive order-1 periodic solution. This completes the proof of this theorem. □
Next, we state and prove our result on the existence and stability of positive order-k (\(k=1,2\)) periodic solutions of model (2.5).
Theorem 3.2
For case \(\mathit{RL}\leq I_{*}\), if \(p_{\max}\in(p^{*},1)\), then model (2.5) has a positive order-1 or order-2 periodic solution, which is orbitally asymptotically stable. Further, model (2.5) has no order-k solution (\(k\geq3\), \(k\in\mathbb{N}\)).
Proof
If \(\mathit{RL}\leq I_{*}\), then any trajectory of model (2.5) initiating from section \(\Sigma_{p_{\max}}\) will reach section \(\Sigma _{\mathit{RL}}\) and experience infinitely many impulses by the geometrical construction of the phase space of model (2.5). Under the condition \(p_{\max}\in(p^{*},1)\), for any two points \(P_{i}^{+}(S_{i}^{+}, \mathit{RL})\) and \(P_{j}^{+}(S_{j}^{+}, \mathit{RL})\) satisfying \(0< S_{i}^{+}< S_{j}^{+}< G(\mathit{RL})\), the trajectories \(\Pi_{S_{i}^{+}}\) and \(\Pi_{S_{j}^{+}}\) will reach section \(\Sigma _{\mathit{RL}}\) at points \(P_{i+1}(S_{i+1},\mathit{RL})\) and \(P_{j+1}(S_{j+1}, \mathit{RL})\), respectively. Further, the trajectories \(\Pi_{S_{i}^{+}}\) and \(\Pi_{S_{j}^{+}}\) are mapped to points \(P_{i+1}(S_{i+1}^{+},\mathit{RL})\) and \(P_{j+1}(S_{j+1}^{+},\mathit{RL})\) due to impulsive effect, respectively. Therefore, if the conditions \(0< S_{i}^{+}< S_{j}^{+}< G(\mathit{RL})\) and \(p^{*}< p<1\) hold, then it follows from the monotonicity of function \(\mathcal{F}_{1}\) that
Suppose that the trajectory of model (2.5) with the initial point \(P_{0}^{+}(S_{0}^{+}, \mathit{RL})\) on section \(\Sigma_{p_{\max}}\) will reach section \(\Sigma_{\mathit{RL}}\) at point \(P_{1}(S_{1}, \mathit{RL})\) in a finite time, and point \(P_{1}\) is mapped to point \(P_{1}^{+}(S_{1}^{+}, \mathit{RL})\) on section \(\Sigma _{p_{\max}}\) after once impulsive effects, where \(S_{1}^{+}< G(\mathit{RL})\) (due to the fact \(p_{\max}\in(p^{*},1)\)). Thus, there exist the following three cases:
-
(i)
If \(S_{0}^{+}=S_{1}^{+}\), model (2.5) has a positive order-1 periodic solution;
-
(ii)
If \(S_{0}^{+}\neq S_{1}^{+}\), without loss of generality, suppose that \(S_{0}^{+}< S_{1}^{+}\), it follows from (3.6) that \(S_{2}^{+}< S_{1}^{+}\). Furthermore, if \(S_{2}^{+}=S_{0}^{+}\), then model (2.5) has a positive order-2 periodic solution;
-
(iii)
If \(S_{0}^{+}\neq S_{1}^{+}\neq S_{2}^{+}\neq\cdots\neq S_{k}^{+}\) \((k\geq3)\) and \(S_{0}^{+}=S_{k}^{+}\), then model (2.5) has a positive order-k periodic solution. In fact, this is impossible. If \(S_{1}^{+}< S_{0}^{+}\), then from disjointness of any two trajectories and (2.7), we have \(S_{1}^{+}< S_{2}^{+}\) and then \(S_{1}^{+}< S_{2}^{+}< S_{0}^{+}\) or \(S_{1}^{+}< S_{0}^{+}< S_{2}^{+}\). If \(S_{0}^{+}< S_{1}^{+}\), we have \(S_{2}^{+}< S_{1}^{+}\) and then \(S_{0}^{+}< S_{2}^{+}< S_{1}^{+}\) or \(S_{2}^{+}< S_{0}^{+}< S_{1}^{+}\). Therefore, there are four relations among \(S_{0}^{+}\), \(S_{1}^{+}\) and \(S_{2}^{+}\) given by
$$\begin{gathered} \mathrm{(a)}\quad S_{1}^{+}< S_{2}^{+}< S_{0}^{+},\qquad\mathrm{(b)}\quad S_{1}^{+}< S_{0}^{+}< S_{2}^{+}, \\ \mathrm{(c)}\quad S_{0}^{+}< S_{2}^{+}< S_{1}^{+},\qquad\mathrm{(d)}\quad S_{2}^{+}< S_{0}^{+}< S_{1}^{+}. \end{gathered} $$Now, we consider each case, respectively.
-
(a)
If \(S_{1}^{+}< S_{2}^{+}< S_{0}^{+}\), it follows that \(S_{1}^{+}< S_{3}^{+}< S_{2}^{+}\) by (3.6). Repeating the above process, we have
$$ 0< S_{1}^{+}< S_{3}^{+}< \cdots< S_{2k+1}^{+}< \cdots< S_{2}^{+}< S_{0}^{+}< G(\mathit{RL}). $$(3.7)Similar to case (a), we have
-
(b)
If \(S_{1}^{+}< S_{0}^{+}< S_{2}^{+}\), then
$$ 0< \cdots< S_{2k+1}^{+}< \cdots< S_{3}^{+}< S_{1}^{+}< S_{0}^{+}< S_{2}^{+}< \cdots < S_{2k}^{+}< \cdots< G(\mathit{RL}). $$(3.8) -
(c)
If \(S_{0}^{+}< S_{2}^{+}< S_{1}^{+}\), then
$$ 0< S_{0}^{+}< S_{2}^{+}< \cdots< S_{2k}^{+}< \cdots< S_{3}^{+}< S_{1}^{+}< G(\mathit{RL}). $$(3.9) -
(d)
If \(S_{2}^{+}< S_{0}^{+}< S_{1}^{+}\), then
$$ 0< \cdots< S_{2k}^{+}< \cdots< S_{2}^{+}< S_{0}^{+}< S_{1}^{+}< S_{3}^{+}< \cdots < S_{2k+1}^{+}< \cdots< G(\mathit{RL}). $$(3.10)
-
(a)
If there exists an order-k periodic solution \((k\geq3, k\in\mathbb {N})\) in model (2.5), then \(S_{0}^{+}\neq S_{1}^{+}\neq S_{2}^{+}\neq \cdots\neq S_{k-1}^{+}\), and \(S_{0}^{+}=S_{k}^{+}\), which contradicts (3.7)-(3.10). So we conclude that model (2.5) has no period-k \((k\geq3,k\in\mathbb{N})\) solution with \(p_{\max}\in(p^{*},1)\).
Further, for \(k\in\mathbb{N}\), the sequences \(\{S_{2k}\}\) and \(\{ S_{2k+1}\}\) are convergent. Therefore, there exist \(S_{1}^{*}\) and \(S_{2}^{*}\) such that \(\lim_{k\rightarrow\infty}S_{2k}^{+}=S_{1}^{*}\), \(\lim_{k\rightarrow \infty}S_{2k+1}^{+}=S_{2}^{*}\). Using the Poincaré (2.7), we have \(S_{1}^{*}=\mathcal{F}_{1}(S_{2}^{*},p_{\max}, \theta)\), \(S_{2}^{*}=\mathcal {F}_{1}(S_{1}^{*},p_{\max}, \theta)\). Therefore, model (2.5) has an orbitally asymptotically stable positive periodic solution. Due to the vector field of (2.5), the positive periodic solution is order-1 in the cases of (a) and (c) and it is an order-2 periodic solution in the cases of (b) and (d). □
3.2 The case of \(I_{*}<\mathit{RL}\)
For \(I_{*}<\mathit{RL}\), any trajectory starting from \((S_{0},I_{0})\in\Sigma_{p_{\max }}\) does not reach \(\Sigma_{\mathit{RL}}\) or reaches \(\Sigma_{\mathit{RL}}\) finitely (or infinitely) many times, which depends on the initial conditions and the control parameter \(p_{\max}\). From the vector field construction of the phase space of model (2.5), we suppose there exists a trajectory \(\Pi(C,t_{0})\) starting from the initial point \(C(S_{C}, \mathit{RL})\in \Sigma_{p_{\max}}\) such that the line \(I=\mathit{RL}\) tangents to this trajectory at point \(D(G(\mathit{RL}),\mathit{RL})\). If the trajectory of model (2.5) with the initial condition \((S_{0},I_{0})\) (\(I_{0}<\mathit{RL}\)) does not reach section \(\Sigma_{\mathit{RL}}\), then model (2.5) has no periodic solutions. Therefore, we always assume that there exist trajectories of model (2.5) reaching section \(\Sigma_{\mathit{RL}}\) infinitely many times. For this reason, the condition \(\Lambda/d-\mathit{RL}-p_{\max}((\Lambda /d-\mathit{RL})^{2}/(\Lambda/d-\mathit{RL}+\theta))< S_{C}\), that is, \(p^{**}< p_{\max}<1\), where
in which is a sufficient condition for a trajectory \(\Pi(C_{0},t_{0})\) of model (2.5) from the initial point \(C_{0}(S_{0},\mathit{RL})\) \((0< S_{0}< S_{C})\) intersects with section \(\Sigma_{\mathit{RL}}\) infinitely many times due to impulsive effects. However, if \(0< p_{\max}<\widetilde {p}^{**}\), where
then the trajectory \(\Pi(C_{0},t_{0})\) from the initial point \(C_{0}(S_{0},\mathit{RL})\) \((0< S_{0}< G(\mathit{RL}))\) does not reach \(\Sigma_{\mathit{RL}}\) or tends to the endemic equilibrium \((S_{*},I_{*})\) after reaching \(\Sigma_{\mathit{RL}}\) finitely many times.
Theorem 3.3
For the case \(I_{*}<\mathit{RL}\), if \(p^{**}< p_{\max}<1\), then model (2.5) has a positive order-1 or order-2 periodic solution, which is orbitally asymptotically stable. Further, if \(0< p_{\max}<\widetilde {p}^{**}\), then model (2.5) has no positive order-k \((k\geq 1)\) periodic solution.
The proof of Theorem 3.2 is similar to the proof of Theorem 3.3, we therefore omit it here.
4 Numerical simulation
In this section, the following numerical results are provided to illustrate the theoretical results and the feasibility of state-dependent control strategy. Let \(\Lambda=16\), \(\alpha=10\), \(\beta =0.004\), \(k=0.01\), \(d=0.1\), \(\omega=35\) and \(\gamma=0.01\) by Table 1. Now we consider the following SIR epidemic model with the continuous treatment control strategy and nonlinear impulsive vaccination as state-dependent feedback control:
Firstly, by directly calculating, we have \(\mathcal {R}_{0}\approx1.62>1\) and \(\alpha=10<\omega^{2}(\beta+dk)+\omega^{2}k(d+\gamma)+\omega(2d+\alpha k)\approx17.97\). It is easy to know that model (4.1) without pulse effects has a globally asymptotically stable endemic equilibrium \((S_{*},I_{*},R_{*})=(86.09,27.33,46.58)\), which is illustrated in Figures 2(a)-2(c) by the red lines.

The trajectory of model ( 4.1 ) with/without \(\pmb{\mathit{RL}=20< I_{*}=27.33}\) and \(\pmb{p_{\max }=0.4>p^{*}\approx0.38}\) . The initial value is \((S_{0},I_{0},R_{0})=(59.34,20,62.11)\).
Secondly, we choose the control parameters to be \(\theta=0.8\) and \(\mathit{RL}=20< I_{*}=27.33\), then \(G(\mathit{RL})=(1+k\mathit {RL})/\beta(d+\gamma+\alpha/(\omega +\mathit{RL}))\approx87.55\), it follows from (2.6) that we get \(p^{*}\approx0.38\). Let \(p_{\max}=0.4>p^{*}\), thus from Theorems 3.1 and 3.2 we know that model (4.1) has a positive order-1 periodic solution, which is shown in Figures 2(a)-2(c) by the blue lines. Further, the order-1 periodic solution is orbitally asymptotically stable and has the asymptotic phase property (see Figure 2(d)). Figures 2(a)-2(c) show the control strategy \(\Delta S(t)=p_{\max}S^{2}(t)/(S(t)+\theta)=0.4S^{2}(t)/(S(t)+0.8)\) of state-dependent pulse vaccination as an effective technique in controlling and preventing of disease. The phase portrait and time series of a chaotic solution at \(p_{\max}=0.01< p^{*}\) are shown in Figure 3.

The chaotic solution of model ( 2.5 ) with \(\pmb{\mathit{RL}=20< I_{*}=27.33}\) and \(\pmb{p_{\max}=0.01< p^{*}=0.38}\) . The initial value is \((S_{0},I_{0},R_{0})=(87,20,50)\).
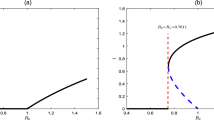
Finally, we choose \(\mathit{RL}=28>I_{*}=27.33\), \(\theta=0.8\) and \(p_{\max}\) to be 0.2, 0.3, 0.4, 0.62, 0.7 and 0.8, respectively. Numerical simulation shows that model (4.1) has a trajectory \(\Pi (C,t_{0})\) starting from the initial point \(C(S_{C}, \mathit{RL})=(51.55, 28)\) which is tangent to the line \(I=\mathit{RL}=28\) at point \(D(G(\mathit{RL}),\mathit{RL})=(86,28)\). It follows from (3.11) and (3.12) that \(p^{**}\approx0.61\) and \(\widetilde{p}^{**}\approx0.41\). By Theorem 3.3, it is easy to see that model (4.1) has an orbitally asymptotically stable positive order-1 periodic solution when \(p_{\max }(=0.62, 0.7, 0.8)>p^{**}\approx0.61\), but trajectories may be free from pulse effect or experience finitely many impulses and then tend to the endemic equilibrium \((S_{*},I_{*})\) when \(p_{\max}(=0.2,0.3,0.4)<\tilde {p}^{**}\approx0.41\), which is shown in Figure 4.

The trajectories of model ( 4.1 ) with \(\pmb{\mathit{RL}=28>I_{*}}\) and \(\pmb{p_{\max}=0.2, 0.3, 0.4, 0.62, 0.7, 0.8}\) . The initial value is \((S_{0},I_{0})=(65,12)\).
5 Discussion
In order to control the infected individuals, the SIR epidemic model with resource limitation including nonlinear impulsive function and state-dependent feedback control is studied both theoretically and numerically. From Theorems 3.1 and 3.2, we obtain sufficient conditions for the existence and stability of positive order-1 or order-2 periodic solution. It is assumed that \(\Lambda=16\), \(\alpha=10\), \(\beta=0.004\), \(k=0.01\), \(d=0.1\), \(\omega=35\), \(\gamma =0.01\), \(\theta=0.8\), and we choose the economic threshold \(\mathit{RL}=20< I^{*}\). It is easy to know that the conditions of Theorems 3.1 and 3.2 are satisfied, then the solution of model (4.1) initiating from \((S_{0},I_{0},R_{0})=(59.34,20,62.11)\) tends to the orbitally asymptotically stable positive order-1 periodic solution (see Figure 2). However, the numerical simulations show that the dynamic behavior of model (4.1) will become more complex if the conditions of Theorem 3.2 are unsatisfied (see Figure 3). Further, we choose the economic threshold \(\mathit{RL}=28>I^{*}\). From Theorem 3.3, the solution of model (4.1) initiating from \((S_{0},I_{0})=(65,12)\) tends to a stable positive order-1 periodic solution when \(p_{\max}>p^{**}\). On the other hand, the solution of model (4.1) initiating from \((S_{0},I_{0})=(65,12)\) tends to the endemic equilibrium \((S_{*},I_{*})\) when \(p_{\max}<\tilde{p}^{**}\)(see Figure 4). Our main results imply that we can choose proper control parameters to maintain the density of infections at a low level for preventing the spread of the disease. At the same time, some numerical simulations also show that model (2.5) has richer dynamic behaviors because of the effects of state-dependent impulse control strategies.
References
De Quadros, CA, Andrus, JK, Olivé, JM, Silveira, C, Eikhof, RM, Carrasco, P, Fitzsimmons, JW, Pinheiro, FP: Eradication of poliomyelitis: progress in the Americas. Pediatr. Infect. Dis. J. 3, 222-229 (1991)
Sabin, AB: Measles, killer of millions in developing countries: strategy for rapid elimination and continuing control. Eur. J. Epidemiol. 7, 1-22 (1991)
Ramsay, M, Gay, N, Miller, E, Rush, M, White, J, Morgancapner, P, Brown, D: The epidemiology of measles in England and Wales: rationale for the 1994 national vaccination campaign. Commun. Dis. Rep. 4, R141-R146 (1999)
Fiore, AE, Bridges, CB, Cox, NJ: Seasonal influenza vaccines. Curr. Top. Microbiol. Immunol. 333, 43 (2009)
Chang, YL, Brewer, NT, Rinas, AC, Schmitt, K, Smith, AC, Rinas, JS: Evaluating the impact of human papillomavirus vaccines. Vaccine 27, 4335-4362 (2009)
Liesegang, TJ: Varicella zoster virus vaccines: effective, but concerns linger. Can. J. Ophthalmol. 44, 379-384 (2009)
Agur, Z, Cojocaru, L, Mazor, G, Anderson, RM, Danon, YL: Pulse mass measles vaccination across age cohorts. Proc. Natl. Acad. Sci. USA 90, 11698-11702 (1993)
Shulgin, B, Stone, L, Agur, Z: Pulse vaccination strategy in the SIR epidemic model. Bull. Math. Biol. 60, 1123-1148 (1998)
Stone, L, Shulgin, B, Agur, Z: Theoretical Examination of the Pulse Vaccination Policy in the SIR Epidemic Model. Elsevier, New Haven (2000)
Jiao, JJ, Chen, LS, Rinas, AC, Cai, SH: An SEIRS epidemic model with two delays and pulse vaccination. J. Syst. Sci. Complex. 21, 217-225 (2008)
Muzzi, A, Paná, A: Threshold behaviour of a SIR epidemic model with age structure and immigration. J. Math. Biol. 57, 1-27 (2008)
Meng, XZ, Li, ZQ, Wang, XL: Dynamics of a novel nonlinear SIR model with double epidemic hypothesis and impulsive effects. Nonlinear Dyn. 59, 503-513 (2012)
Terry, AJ: Pulse vaccination strategies in a metapopulation SIR model. Math. Biosci. Eng. 7, 455 (2010)
Tang, SY, Xiao, YN, Clancy, D: New modelling approach concerning integrated disease control and cost-effectivity. Nonlinear Anal. 63, 439-471 (2005)
Tang, SY, Xiao, YN, Cheke, RA: Dynamical analysis of plant disease models with cultural control strategies and economic thresholds. Math. Comput. Simul. 80, 894-921 (2010)
Zhao, TT, Xiao, YN, Bork, P: Plant disease models with nonlinear impulsive cultural control strategies for vegetatively propagated plants. Math. Comput. Simul. 107, 61-91 (2014)
Tian, Y, Sun, KB, Chen, LS, Kasperski, A: Studies on the dynamics of a continuous bioprocess with impulsive state feedback control. Chem. Eng. J. 157, 558-567 (2010)
Huang, MZ, Guo, HJ: Modeling impulsive injections of insulin: towards artificial pancreas. SIAM J. Appl. Math. 72, 1524-1548 (2012)
Nie, LF, Teng, ZD, Torres, A: Dynamic analysis of an SIR epidemic model with state dependent pulse vaccination. Nonlinear Anal., Real World Appl. 13, 1621-1629 (2012)
Nie, LF, Teng, ZD, Guo, BZ: A state dependent pulse control strategy for a SIRS epidemic system. Bull. Math. Biol. 75, 1697-1715 (2013)
Zhou, LH, Fan, M: Dynamics of an SIR epidemic model with limited medical resources revisited. Nonlinear Anal., Real World Appl. 13, 312-324 (2012)
Ling, L, Jiang, GR, Long, TF: The dynamics of an SIS epidemic model with fixed-time birth pulses and state feedback pulse treatments. Int. J. Comput. Math. 91, 5579-5591 (2014)
Qin, WJ, Tang, SY, Cheke, RA: Nonlinear pulse vaccination in an SIR epidemic model with resource limitation. Abstr. Appl. Anal. 2013, 670263 (2013)
Lakshmikantham, V, Bainov, DD, Simeonov, PS: Theory of impulsive differential equations. Math. Comput. Simul. (2014)
Simeonov, PS, Bainov, DD: Orbital stability of periodic solutions of autonomous systems with impulse effect. C. R. Acad. Bulgare Sci. 19, 2561-2585 (1988)
Bonotto, EM, Federson, M: Limit sets and the Poincaré-Bendixson theorem in impulsive semidynamical systems. J. Differ. Equ. 224, 2334-2349 (2008)
Ciesielski, K: On stability in impulsive dynamical systems. Bull. Pol. Acad. Sci., Math. 52, 81-91 (2004)
Kaul, S: On impulsive semidynamical systems. J. Math. Anal. Appl. 150, 120-128 (1990)
Gao, SJ, Chen, LS, Nieto, JJ, Torres, A: Analysis of a delayed epidemic model with pulse vaccination and saturation incidence. Math. Comput. Simul. 24, 6037 (2006)
Hill, A: The possible effects of the aggregation of the molecules of haemoglobin on its dissociation curves. Physiology 40, 1115-1121 (1909)
Jiang, GR, Lu, QS: Impulsive State Feedback Control of a Predator-Prey Model. Elsevier, Amsterdam (2007)
Jiang, GR, Lu, QS, Qian, LN: Complex dynamics of a Holling type II prey-predator system with state feedback control. Chaos Solitons Fractals 31, 448-461 (2007)
Nie, LF, Peng, JG, Teng, ZD, Hu, L: Existence and stability of periodic solution of a Lotka-Volterra predator-prey model with state dependent impulsive effects. J. Comput. Appl. Math. 224, 544-555 (2009)
Tang, S, Cheke, RA: State-dependent impulsive models of integrated pest management (IPM) strategies and their dynamic consequences. J. Math. Biol. 50, 257 (2005)
Acknowledgements
The article is supported by the National Natural Science Foundation of China (11461067, 11402223 and 11271312).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
ZLH carried out the main part of this article, LFN corrected the manuscript, JGL and ZZ brought forward some suggestions on this article. All authors have read and approved the final manuscript.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
He, Z.L., Li, J.G., Nie, L.F. et al. Nonlinear state-dependent feedback control strategy in the SIR epidemic model with resource limitation. Adv Differ Equ 2017, 209 (2017). https://doi.org/10.1186/s13662-017-1229-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-017-1229-8