
Abstract
Robot-based activities have been proven to be a valuable tool for children with learning and developmental disabilities. However, their feasibility in general educational environments needs further exploration. This scoping review provides a critical examination of robot-based learning experiences involving children with disabilities, implemented either in mainstream schools or in specialized centers in order to gain insight into their potential to support inclusion. For this purpose, a search was conducted in the multidisciplinary Scopus and WoS databases, completed with Dialnet database. Based on PRISMA guidelines for literature reviews, we limited the systematic analysis to 33 papers published after 2009 that contain information on the instructional design and details of how the activities were implemented. On the other hand, studies reporting interventions with robots for clinical purposes were excluded as well as papers focused exclusively on technical developments. Content analysis shows that most experiences lead to improvements in terms of educational goals and/or stakeholders’ satisfaction. However, the analysis also reported issues that may hinder the adoption of these practices in general classrooms and integrated education services. The reported difficulties include the lack of stability and autonomy of the robots used, the need for aids and adaptations to enable children with sensory and physical impairments to interact easily with the robots, and the requirement of technical support with system’s setup, implementation and maintenance. We conclude that robots and robotics are a powerful tool to address the needs of diverse learners who are included in mainstream classrooms. This review aims at presenting evidences of good practices and recommendations for successful implementation.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Inclusive education means that all learners attend schools in their own neighborhoods in general, age-appropriate classes where they are able to learn, contribute and participate together in all aspects of school life in a shared learning environment. This implies that schools, classrooms, programs and activities should be designed to ensure access to quality education for all students. Fulfilling these goals requires imagining, selecting and designing learning scenarios and activities that can be performed naturally, successfully and joyfully by any child in the class. Hence there is a need to investigate methods to transform education systems and other learning environments in order to meet the requirements of the full diversity of learners [1].
Educational robotics are used worldwide as learning tools [2,3,4,5] but are not so widespread in inclusive education [6, 7]. Although there is already a large corpus of experiences with “assistive robotics” for children with disabilities, more research needs to be conducted of the potential of robotics as a teaching tool in inclusive classrooms to identify good robot-based practices for all learners [8].
According to Pliasa et al. [9] inclusive education has three main goals: guarantee a quality education based on personalized instruction that fosters engagement and feelings of capability; provide a rich, supportive social environment to enhance relationships and participation; provide all children with the technology-related ability and computational thinking (CT) that is de facto the new literacy. To address these goals, we already know that both children with disabilities and non-disabled children engage easily in robot-based games and activities, and that classroom experiences with robots and about robots lead to better academic achievement in technical and non-technical subjects, which expands learners’ future education and employment horizons [10,11,12,13].
Related systematic reviews on robot services for children with disabilities overlap to some extent with our research but do not cover the same theoretical area. Papakostas et al. [14] and González-González et al. [15] focus on rehabilitation and healthcare programs rather than learning activities at school. Also, differently from our approach, the interesting review of Belpaeme et al. [16] analyses educative practices limited to social robots excluding other type of robots and robotic kits. Pivetti et al. [13] only review learning experiences where children program robots, excluding other activities with robots. Finally, Tlili et al. [8] and Miguel Cruz et al. [17] put the focus on the quality of the research and on robot’s performance and technical challenges.
In the context of recent research, the aim of this scoping review is to analyze existing robot-based educative practices to gain insight on the potential of robotic tools to boost inclusive education.
2 Methods
This article is a scoping review of literature reporting robot-based learning experiences with children with disabilities. The review is based on Prisma statement [18] in the selection of sources of information, search strategy, steps and procedure of the screening process and the report of the predefined protocol, and uses Mendeley software for bibliographical references management.
2.1 Scope and research questions
The scope of this review is broad, including all kinds of robots used in all kinds of learning scenarios and activities, but is limited to those designed for children with disabilities. These include young learners with any kind of learning disability, learning delay, disease or impairment (i.e., physical, sensory or intellectual) that affects functionality (i.e., cognitive, emotional, physical or social) and slows or limits their learning and/or development temporarily or permanently, regardless of particular clinical diagnoses, if any. Our survey only includes studies in which the instructional design is reported in sufficient detail for analysis in terms of its potential use in inclusive classrooms.
The research questions are the following:
RQ1 What population does the robot-based learning activity target? And, what types of special needs are addressed?
RQ2 What robot or robotic platform is used?
RQ3 What robot-based activities are implemented?
RQ4 How inclusive are the activities, or could they be?
2.2 Eligibility criteria
The inclusion criteria were: (1) studies focusing on the use of robots for educational purposes for learners from early childhood to secondary education, regardless the methodology and the positive or negative nature of the results; (2) studies involving at least one child with special educational needs; (3) studies providing detailed information on the instructional design; and (4) studies published and available in full-text form in peer-reviewed journals or at conferences either in English or Spanish, published after 2009.
The exclusion criteria were: (1) studies reporting experiences with robots used only for therapy or rehabilitation; (2) studies reporting learning experiences with no children with special needs involved; (3) studies that use educational or assistive technology other than robots (e.g., virtual characters, tablets, augmented or virtual reality); (4) systematic, scoping or narrative reviews or theoretical papers; (5) studies focused exclusively on the design and technical development of a robot or on a particular process of robotic platforms (e.g., algorithm, type of communication); (6) studies that report educational experiences without the description of the main components of the teaching–learning experience (i.e., goals, materials, teacher intervention, setting, resources and outcomes).
2.3 Sources and search strategy
After a wide-ranging search in Scopus, Web of Science (WoS), Compendex and Eric databases, the most useful results were obtained from the multidisciplinary Scopus and WoS databases, while Compendex and Eric returned meagre results often duplicated in the other two. To complete the selection, we added the Hispanic Dialnet database, as these results were not contained in the aforementioned databases and offered us a complementary view of the research topic in our area.
We first ran a broad search with the rule [robot* AND (“special education” OR “inclusive education”)] but the results showed that these terms were very seldom used in research on special education and hence targeted studies were overlooked. We broadened the scope with the term educat* combined with at least one term related to learning disabilities and developmental disorders. The final search rule applied to Scopus, WoS and Dialnet databases was:
robot* AND educat* AND ("Down syndrome" OR "cerebral palsy" OR ADHD OR "learning disabilities" OR "children with disabilities" OR "special needs" OR impairment).
We filtered the result to only select journal articles or conference papers published after 2009 in English or Spanish. The total number of records obtained was 435 (153 from WoS, 270 from Scopus and 12 from Dialnet) of which 99 were duplicates. All searches were performed during June and July 2022 and the final results obtained by the end of July.
2.4 Selection of studies
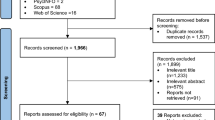
From the initial sample, Authors 1 and 2 first filter by screening eligible articles based on their titles and abstracts. A total of 77 articles were selected and the full texts obtained. Each author independently assessed the resulting references for eligibility completing an inclusion/exclusion checklist by reading the full text. A data set of 33 documents was finally selected for systematic analysis (see Fig. 1).

Flow diagram of the article search and selection process. The reasons for exclusion are described in Table1
The number of studies excluded and reasons for exclusion are summarized in Table 1.
2.5 Statistical and bibliometric data
The final data set of 33 studies included 21 journal papers and 12 conference papers. According to the bibliometric data provided by the WoS, Scopus and Dialnet databases, the total number of citations is 235, average citations per item is 7.12, and the h-index is 11. 32 references were written in English and one in Spanish. These 33 references are published in 24 journals 6 of them from the fields of Education, the most represented area, followed by Computing, Rehabilitation and Psychology, among others. The authors with more than one reference are affiliated to seven different countries: Canada 8, United Kingdom and Italy 6, Netherlands and Spain 4, and Greece 3 and Portugal 3 as well. The subject more represented according to databases categories is Computer Science with 14 papers, followed by Rehabilitation with 7 references.
3 Results
To address the three research questions, the analysis is organized into three sections: children, robots and learning experiences. In Table 2 we provide an overview of the 33 selected studies which are explained in detail in this section.
3.1 Children
The number of participants in the studies ranges from 1 to 84, with an age range between 18 months and 20 years. As can be noticed in Table 3, in the studies girls are underrepresented. Four studies were based only on girls and one only on boys.
As summarized in Table 3, the participants were children with diverse disabilities and impairments, ranging from severe and multiple difficulties to children presenting developmental delay. The studies gather 125 references of children who presented multiple disabilities with concurrence of more than one of the following disorders or impairments: ASD, ADHD, hearing loss, cerebral palsy, motor deficiencies, cognitive disabilities and Down syndrome. Not surprisingly, there is remarkable heterogeneity in terms of the specific learning-related capabilities and limitations, even among children with similar impairment.
3.2 Robots
In Table 4 the 12 different robots used are classed into seven overarching categories. Only two robots, IROMEC (5 references) and KASPAR (1 reference), were specifically developed for children with special needs. The other robots are off-the-shelf products developed for the education, entertainment and companionship of non-disabled children.
The most used robots were LEGO Mindstorms commercial kits (i.e., WeDo, Mindstorms NXT, Mindstorms EV3, Mindstorms RCX) that provide both constructive and programming utilities with expanded functionality and complements (13 studies). NAO with social affordances and programming utilities was the most used social robot (5 studies). Other social robots enabling tangible programming were DASH, Bee-Bot, Codi-Oruga and KIBO (7 studies). These platforms are playful, accessible and versatile supporting different modes of use and interaction. Finally, other robots were played with and controlled by children without programming activity (Daisy Robot, and Cellulo Robotic Platform).
When the interaction with the robots is explicitly social, the child–robot interaction can be defined by the complementary roles assumed [16, 50, 51]. We identify in the studies three roles assumed by the robot in learning scenarios: robot as a tutor or teacher (i.e., provides content-related support through hints and tutorials, and gives supervision, feedback and encouragement); robot as a peer (e.g., playmate); and robot as a pupil whom the child teaches. Table 2 lists the roles assumed and the way the robots were interacted. As an instance of the different roles and modalities of interaction, the experience reported by Van den Havel et al. [21] is illustrative, with 17 children with severe physical disabilities playing with humanoid robot ZORA in different scenarios in two specialized centers. The scenarios were offered to the children, depending on the goals determined by the professionals: movement exercises (robot executing movements and instructions), dance exercises (movement exercises with accompanying music), robot control games (in which the child could control the robot by, e.g., speech or touch) and cognitive exercises (e.g., question and answer games or card games in which the child has to show the matching illustrations to the robot). During play, the robot performed different interactive social behaviors such as asking the children to show cards with pictures of different animals, giving a reward by clapping or cheering when answer is correct, shaking hands if its hand is touched, giving a high five if its foot is touched. Out of the different roles ZORA can play, professionals indicated that a role as motivator is most promising. Other roles in which ZORA could make valuable contributions were the role of rewarder and instructor, a buddy, an intermediate, a model during movement exercises, or an assistant. The following professionals collaborated to plan, implement, support and evaluate the intervention: 2 physiotherapists, 2 speech language therapists, 1 occupational therapist, 1 therapeutic group leader and 1 physical education teacher, and the researcher that controlled the robot remotely. Practitioners followed a training session to become familiar with the robot and the scenarios.
With regard to accessibility, the importance of experiencing the robots physically [24] leads to the implementation of personalized adaptation strategies to accommodate robotic systems to learners’ needs, and especially to those of children with (severe) physical and sensory impairments [22, 42]. These adaptations involve software configurations (e.g., ZORA, a software adaptation of NAO robot); modifications of the robot embodiment (e.g., DASH); or assistive technologies to enable children with motor and speech impairments to manipulate and control the robot (e.g., speech generating device to control a LEGO robot) and hence be able to take programs as complex as FIRST LEGO league [22, 24, 26]. Cognitive adaptations include the use of prompts, reminders, and simplified instructions for reading. Finally, social adaptations include anxiety reduction and pairing of cooperative learners [42].
3.3 Learning activities
To address the research questions, instructional design and findings are analyzed in this section according to the dimensions of setting, educational goals, scenarios and activities, practitioners involved, duration, and main outcomes. A final section gathers lessons learned, challenges faced and recommendations (see Tables 2 and 5).
3.3.1 Setting
In total, 16 studies took place in mainstream kindergarten, primary or secondary schools during the school year (14) or during the summer break at integrated Summer Camps (2). In 9 studies the activity was run in special education schools. The remaining studies were conducted in therapy centres (3), hospital-based schools (3), a research laboratory (1) and a rehabilitation centre (1). In one study the setting was not specified (see Table 2).
3.3.2 Educational goals
Teachers identified a wide range of learning objectives, encompassing specific curricular content and development objectives [45]. In Table 5, the learning goals are grouped into broader educative domains: (1) STEM and CT (e.g., reasoning, coding and programming); (2) Communication and social interaction (e.g., acquisition of social rules, following instructions); (3) Physical development (e.g., coordination, strength, control; sense of space and direction; spatial language and spatial ability); (4) Language (e.g., narration, handwriting, speech, literacy, comprehension); (5) Play (i.e., play for play’s sake); (6) Mathematics; (7) Engagement (e.g., managing emotions, attention, motivation, participation, satisfaction, fun, tolerance of frustration, enjoyment); (8) Artistic Expression, and 9) Other cognitive developments.
Most of the studies (23) were aimed at developing cognitive dimensions related to STEM and CT, such as learning about simple cause and effect, developing and executing a plan, writing a program with or without support, and creation of algorithms to solve problems.
The second main objective addressed was improving the participants’ communication and social skills (12) such as turn taking in rule games [9, 20, 31, 33, 39, 41, 46], joint attention [31], imitation [31, 33, 39] and group regulation behaviors. Studies with children with sensory, motor and speech impairments included as well communication goals related to improving the use of alternative communication systems, accessibility interfaces [22, 25] and Braille language [28] (see Table 5).
3.3.3 Scenarios, social context and activities
The robot-based activities were implemented in the following teaching–learning scenarios:
-
1.
Creative/constructive to design, create and build one’s own robots from kits to complete specific challenges or tasks (i.e., physical assembly of the robot from building materials). We include also creating the set on which the robot will perform;
-
2.
Programming to design and implement a control program enabling the robot to perform a task to solve problems of relevance to students or in game scenarios;
-
3.
Controlling the robot to interact with the robots in different ways, including speech, touch, manipulation and gestures;
-
4.
Social interaction to experience the relationship with the robot in interactive activities through a variety of communicative channels and modalities of verbal and non-verbal interaction (e.g., tactile, visual, speech-based, gestural);
-
5.
Play to engage in intrinsically motivating, flexible, spontaneous and voluntary activity with the robot and the robotic kits, experiencing cheerfulness and joy.
With regard to the social context of the activities, in 11 studies, the learning activity was individual, 2 were run in pairs, and 10 were group activities. In 10 studies, the activities took place in more than one of the aforesaid structures.
Table 5 contains the five scenarios, the educative goals, examples of specific activities, the participant profiles, as well as the robots used.
In addition to the summarized information in Tables 2 and 5, we offer here the description in more detail of three learning experiences as instances of practices in inclusive classrooms. In the innovative experience of co-design reported by Metatla et al. [29], eight children with visual impairments from an inclusive school worked together with three buddies non-disabled classmates and carried out four co-design workshops with the small toy-like robot Ozobot to design inclusive activities. The participants worked in groups of four children and one to two teacher assistants. The experience involved six teacher assistants and the school’s special education needs coordinator. Researchers shared facilitation roles with the educators, who were present as both participants and supporters of the sessions. The groups developed and tested a robot-based game, learning about and critiquing the robot technology and exploring its potential to support inclusive play experiences. As outcome, participants created robot characters incorporating multisensory features (e.g., sound, textures and scent) and functions (e.g., a flying robot). Educators reported as an important outcome that the hands-on collaborative robot-based environment reduced the dependence on adults mediating the social interaction between children with disabilities and non-disable children.
Pliasa et al. [9] report an intervention where three children with ASD and three more non-disabled children participated together in game-based activities with Daisy Robot. Participants were children aged 7–9 years old. The activity took place at the childrens’ inclusive elementary public-school. A teacher also participated during the baseline evaluation session before the intervention and in the first step of the intervention. The aim of the study was to explore the beneficial effect of the learning activity on children with ASD and on non-disabled children. Daisy robot is a semi-autonomous social robot in the shape of a flower that resembles a stuffed soft toy. The role of the Daisy robot was to mediate in the interactions among children with ASD, non-disable children, and their teacher. The digital games played were “Flower” where children removed the petals of a digital flower one by one taking turns, the “Memory” game, “Snakes and ladders” and “Snail Race”. The teacher’s role was to help the child with ASD to feel comfortable and safe in the new context. Also, by taking a player’s role, the teacher helped the child interpret the robot’s instructions to his/her teammates, both procedurally and emotionally. The robot provided all the necessary reminders of the rules and the prompts to children so as to stick to the rules and accomplish the tasks. Assisting the teacher, the robot can still be the “significant other” but to a lower degree. Observation scales and sub-scales were applied to measure changes in the abilities of communication, following instruction and rules, and turn taking, among others. The game engaged non-disabled children, and children with ASD became more motivated to engage in actions under the guidance of the robot, and their scores on almost all of the skills were perfected after the interventions.
Martí [38] reports an activity in an integrative primary school where the IROMEC robot were totally integrated in a learning scenario of storytelling. The participants were a group of non-disable students plus one child 8 years old with learning delay due to a mild cognitive disability. The IROMEC robot can show facial expressions incorporating the mouth, nose, eyes and eyebrows, as well as different levels of expressiveness and emotional states, enriched by original sounds to structure and articulate the play experience, creating a life-like impression of an imaginary animal-like character. In this activity, the robot IROMEC played the role of a tortoise while the story told was The tortoise and the hare. The robot’s mobile configuration was used so that it could move about the classroom alone or with remote control. The activity was implemented by the mainstream teacher for 4 sessions using the teaching model normally used in class, either with the support of images or with the robot. When playing with the robot the performance of child with learning delay improved in terms of memorization of the story elements, ability to focus attention and reduction of exuberant motility. Another interesting aspect which emerged in the sessions with the IROMEC compared to sessions with images was the climate in the group.
3.3.4 Practitioners involved
In 11 studies, the general teacher was in charge of running the activity with or without the support of other practitioners. In 9 studies, special education teachers were involved. In 9 studies, the activity required the support of technical experts for preparation, set-up and/or implementation, and even to provide continuous technical assistance to adapt the robot to the different activities in real time. This technical support was provided by IT specialists, engineers, software engineers, robotics volunteers and assistive technology experts. In 19 studies, clinical practitioners were required, specifically psychotherapists, neuropsychiatrists, speech and language therapists, occupational therapists, and therapeutic recreation specialists. In 16 studies, other specialists were needed, including physical education teachers, facilitators, coaches, personal support workers, hospital volunteers, researchers, teaching assistants, educational guidance counsellors and pre-service teachers specialized in Instructional Technologies.
3.3.5 Duration
The total number of sessions ranged from just one session to 30. Activities carried out in 3–6 sessions were the most frequent (15 studies). The time span of the activities ranged between less than 1 month (5) to a full school year. In 15 studies the total duration was not specified. The duration of the sessions lasted from 15–30 min to 2 h in 21 activities. The longest sessions lasted 2–3 days (10). In 11 studies, the length of the sessions was not specified.
3.3.6 Outcomes
Most of the experiences led to improvements in the educational goals and/or stakeholder satisfaction (i.e., teachers, parents and children), though these improvements were sometimes not systematically evaluated or were not statistically significant [43]. The most frequent goal was to facilitate the understanding of concepts related to the STEM areas. The level of success at achieving the different objectives varied from child to child depending on the nature and severity of their disability [39].
The majority of the studies concluded that robots could effectively be used as an educational technology to support the cognitive development of students with learning disabilities [29, 32, 37, 44]. Robots increase the physicality of the experience and provide a greater sense of control [27]. Thus, the robot was used as a tangible cognitive tool to enable the kind of hands-on activities that are so beneficial for diverse cognitive development, including improvements to mental rotation, spatial vocabulary in Brainin et al. [49], visuo-spatial memory and mental planning in Bargagna, [36], learning of abstract concepts in López Montellano et al. [28], movement skills in Van Den Heuvel et al. [19] and measurement procedures in Adams and Cook [26]. According to Adams and Cook, with the aid of AT devices, even children with severe impairment could perform their own hands-on experiments and ‘‘show what they know’’ [26].
In the domain of social interaction, robots promoted spontaneous verbalization and communication with other children with disabilities, with non-disabled peers and with their teachers [20, 38]. Students’ social and communication skills seemed to improve when they were immersed in a shared interest such as coding or controlling the robot.
Another outcome frequently observed was children’s capability to transfer some of the skills learned with robots to other disciplines [47], to everyday school activities [39] and to post-secondary aspects of their lives [30].
Despite these promising results, some authors such as Aslanoglou et al. [35] are cautious and point out that the development of some children’s skills could partly have been due to the support and prompting received from the support staff and cannot be attributed exclusively to the robotics kit, the activities or their use in the educational process, but instead to a combination of many elements.
Finally, no detrimental effects on the behavior of non-disabled children were observed as result of them working in mixed groups, and no issues arose to suggest that the development of non-disabled children was impeded by the participation and actions of their peers with disabilities [9].
3.3.7 Lessons learned for inclusive learning environments
Beyond a child’s individual outcomes, the analysis reveals other relevant findings for developing or re-creating the activities in order to, in the words of Pires et al., navigate toward situated inclusive classroom activities with children with mixed abilities [27]. However, the experiences reported raise some issues that may hinder the adoption of robot-based practices in inclusive classrooms. Interestingly, the majority of the studies also offer informed recommendations to overcome these difficulties.
3.3.7.1 Opportunities
From the analyses, we can conclude that robots are attractive and engaging for children regardless their particular abilities, and are relevant elements to learn complex concepts such as CT, maths and spatial relationships in situated classroom experiences.
A reported component of the learning situation that encouraged acceptance of the robot was the creation of an exploratory, non-judgmental, shared responsibility environment that boosted participation and enthusiasm, which was in turn conducive to learning Knight et al. [30]. Being able to control, design and anticipate the robot’s actions gives children a sense of control and competence. In addition, the orientation to challenges, the hands-on character of the activities and the physical and mostly immediate response/feedback from the robot, reduce the dependence on adults’ feedback, corrections and judgements, being the actual behavior of the robot what validate the actions taken [27].
The scalability of the challenges and the autonomy to complete the tasks gave the students an opportunity to make their own way [32] without feeling under pressure from other students [47]. Teachers could modify and adapt their classes to work on different personalized challenges, not only to meet students’ learning styles and capabilities but also to meet teachers’ previous experience [32, 36, 47].
Challenge-based activities were very well received by the students, as they viewed them as a game [47], although it seems that educators found it difficult to plan play for play’s sake [19].
3.3.7.2 Technical challenges
Some of the platforms used were not satisfactory enough because of shortcomings in terms of adaptability, expandability, autonomy and technical stability [20]. Delays and errors were noted in the NAO robot’s responses, as well as voice recognition problems in speech-based interaction in the study of Amanatiadis et al. [31] and card scan failures in Van Den Heuvel et al. [20]. The robot’s malfunction sometimes generated feelings of frustration and disconnection with the robot among the children, making it difficult for them to interact in the rest of the session [46].
Though there have been efforts to make programming environments accessible and to devise tangible programming setups, visually impaired children could not perform common spatial programming activities like sighted children did and thus did not benefit fully from spatial cognition and CT training [27]. Interesting recommendations for alternative and augmented communication were considered for children with severe physical disabilities as alternatives to speech-based interaction [20]. To make spatial tasks accessible to visually impaired children, it has been suggested that robots such as Bee-Bot and DASH could verbalize their actual position, next action, and the location of the target on a map [27], and even integrate different audio cues to express emotions and game state.
3.3.7.3 Recommendations
One of the most commonly mentioned difficulties integrating these activities in the mainstream curriculum and in the general classrooms is the availability of timely support. In order to work independently without IT assistance, at least two teachers should be present in each session, with one controlling complex robots like NAO and the other working with the children [21], especially when the activities are performed in combination with AT [22].
Teachers reported the need of previous training in the use and programming of more complex robots like NAO [21]. Nevertheless, the teaching of digital, block-based coding to students does not require the teacher to be an expert at computer programming [30]. Advances in social robot programming may, in the future, allow anyone with only a small amount of training to program such a robot [46].
One critical aspect is the need to plan additional training for the children before the actual activity in the classroom, such as individual sessions to familiarize them with the robot or to learn how to manipulate objects using AT systems. It is advisable to have the robot available at school for a longer time, allowing both children and practitioners to work and get properly acquainted with it and with its technical functionalities, even with the simplest robots [36].
Some robot tasks took too long or were too difficult to perform [26]. One session per week proved insufficient to consolidate and boost learned abilities [36]. It would be useful to have flexible work environments enabling different forms of communication, such as voice-commanded robots in the early stages, or for children with cognitive impairments, and only later include blocks as the programming mechanism [27]. However, Encarnação et al. [22] point out that it can be difficult to manage different tasks when children use different robot’s configurations and AT mediated systems working in the same learning environment.
4 Discussion
In this section, the research questions will be addressed and the findings discussed. The first research question asked which children with disabilities and special needs were targeted for and participated in the selected studies. We found a wide variety of abilities and limitations among different studies, among participants within the same study, and even among team members when activities were carried out in groups. The studies include young learners from 2 to 19 years old, with any kind of disability, learning delay, learning disability, attentional impairment, or sensory, physical, cognitive or emotional impairment or disorder that affects learning and requires special educational attention, ranging from children with severe impairments in more than one functioning area to young demotivated students at high school (see Table 3).
The general conclusion is that all children can benefit from robots in their education. Albeit focusing on specific skills and needs, each study proposes learning scenarios and activities that are suitable not only for a particular group of children but which could also be used in personalized hands-on learning for all children in a class.
The second research question asked which robot or robotic platforms were used. We found a wide range of robotic platforms, including off-the-shelf commercial robots, research robots, adapted, accessorized and complemented robots and robots fitted with assistive technology devices. Educational kits which allow both constructive and programming activities were the most used robotic tools, but the studies include also programmable robots (tangible or software based), social robots and interactive toys. It appears that specific features of robots are especially useful for children with specific types of disability and of certain ages. For example, toy-like tangible programming robots like Bee-Bot or KIBO are preferred for youngest learners and for learners with cognitive impairments. A relevant finding is that teachers and researchers changed, modified, adapted and customized robots to make them accessible to children with different needs. Of special interest is the use of robots in combination with assistive interfaces to thus enable alternative methods for manipulating and interacting with the robot, especially in the cases of children with severe physical or sensory impairment who are otherwise unable to benefit from hands-on experiences with robots.
The third research question asked what robot-based activities were implemented. We found a wide array of instructional designs ranging from 20 min of free play with a social robot in a mainstream classroom with the general teacher, to the formal months-long FIRST LEGO program supported by an educational and technical team made up of more than four different specialists. We observe that robots can be used as learning support in curriculum subjects such as mathematics and oral expression, as well as in activities aimed at learning about robots. The goals of these activities addressed all areas of child development and all curricular subjects, either as full programs that are scaled on different levels of difficulty or complexity, or as isolated activities to work on a specific goal. The activities were implemented individually, in pairs, or in groups. Special mention should be made to inclusive activities where children with and without special education needs work together in the same group [9, 29, 32, 34, 38].
Finally, the fourth research question addresses the feasibility of implementing these learning experiences in all learners’ environments and whether and to what extent these activities promote inclusion in the classroom. Regarding the potential to foster inclusion, the observed outcomes in participation, access to curricular content and inclusion are promising [22, 46].
In the experience with children with visual impairments in Pires et al. [27], the educators discussed the possible benefits of robot-based learning in situated classrooms and highlighted the importance of the robot’s physical and socio-emotional features that can be configured, customized and accessorized according to children’s needs.
The physical essence of robots, their capability to move and the multi-sensorial experience of interacting with them open rich scenarios for all learners. Embodied, constructivist and constructionism theories highlight the importance of manipulating objects, not only to map structural cognitive connections but also to develop refined motor actions, proprioception, and tactile perception.
Many references saw an opportunity for inclusion in the adaptation of other general curricular learning activities to be performed through a programming task. In addition, tangible programming environments provided by robots such as KIBO, Bee-bot, and DASH can promote inclusive programming classrooms and clearly benefit all learners at least in the lower educative levels. Actioning tangible elements on the robot or manipulating the programming blocks activate embodied processes that may serve to integrate conceptual knowledge. Tangible programming increases the physicality of the activity and reduces the cognitive load for all learners. The studies of Metatla et al. [29] and Pires et al. [27] with children with visual impairment and of González—González et al. [15] with children with down’s syndrome bring promising evidence that inclusive tangible robot-based programming is worth pursuing, not only for learners with disability.
In different studies such as Marti and Iacono’s [41] with the mobile robot IROMEC, teachers reported the feasibility to integrate robot-based activities into general class dynamics and stressed the potential of robots to create engaging scenarios where children interacted spontaneously, had fun and were equal partners during the game.
The robot-based activities facilitated group dynamics that are conducive to collaborative learning experiences, including shared goal-game setting/execution, closely coupled division of labor, and interaction symmetry [29]. According to López Montellano et al. [28], when working together with non-disabled children, children with visual impairments were able to participate autonomously in robotics activities based on tangible programming robots with minor adaptations. The collaborative nature of robot-based activities [30, 48] seems to foster a sense of teamwork among peers, encourage learning by imitation [36] and reduce the dependence on adults in social mediation with classmates [27]. Hence, Adams and Cook conclude from their studies [24,25,26] that children with physical and communication impairments working with LEGO robots seemed to enhance closer links with the curriculum -specifically maths content and communication skills- and with other students in the class.
5 Conclusions
This study presents the current state-of-the-art of recently published literature on robot-based educational activities involving children with disabilities in pre-primary, primary, lower secondary and upper secondary education. The study focuses on three distinct areas: the children targeted, the robot used, and the learning activity implemented, from the perspective of their potential impact on inclusion. The paper summarizes the main empirical findings of 33 papers pointing out the main outcomes, challenges faced and recommendations for good practices, as well as future research directions.
Our findings show that education with and about robots holds significant potential to enhance inclusive education. Most of the selected papers observed improvements in children with disabilities’ learning, engagement, participation and social interaction.
Despite these promising results, it is noteworthy that robot-based activities have to be carefully designed to ensure accessibility of all learners, and should use stable, reliable robots with user-friendly interfaces. Teachers and specialists must have sufficient training to be confident and proficient in their use in order to avoid dependency on other experts, overload and resistance. The practices implemented both in mainstream schools and in special education centres indicate the convenience of collaborative work with psychologists, pedagogues, special education teachers, general teachers, teaching assistants, and ICT specialists in order to plan, implement and support the instruction. Regarding the evaluation, the wide array of approaches and techniques applied to measure the outcomes of the learning experiences is noticable, indicating the need for working toward a certain consensus around the use of outcome measure in order to make instruction design more evidence driven [52].
Several limitations in the review and in the set of studies analyzed can be acknowledged. First, the review is composed of a small number of studies due to the limiting eligibility criteria, and after full-text screening only 33 qualified for systematic analyses. Although we tried to be as inclusive as possible, the search did not cover the diversity of limitations affecting learning from early childhood to adolescence. Thus, further searches would be required for examining robot-based instruction for other specific special needs. In addition, it would be of the greatest interest for future reviews to expand the search into other leading sources on well-founded educative practice.
Aligned with previous literature [7, 8, 14], we found that girls were under-represented in the studies, and that gender as a factor is not considered, in spite of the well-known gender differences in student’s attitudes toward science and technology [53]. In addition, papers do not describe ethnicity or cultural differences, so the findings cannot be generalized. Other limitations of the set of experiences examined are the small size of the groups of children participating in the sessions, the lack of control group and follow up sessions, the reduced number of sessions investigated that cannot assess properly the results beyond the well-documented novelty effect, and the diversity of methodologies applied to assess outcomes. This review suggests that future research could involve larger samples, analyze gender and cultural factors, and examine strengths and weaknesses of the outcome measures to provide evidence-based knowledge to guide the design and implementation of robot-based interventions in inclusive classrooms.
Notwithstanding the complexity of attending all learners needs, the growing interest in educative robotics and in child–robot interaction, the ongoing policies and research in inclusive education, and the improvements in teacher training in STEM open new encouraging scenarios for diversity-friendly classrooms.
Data availability
Data sharing is not applicable to this article as no datasets were generated or analyzed during the study.
References
UNESCO: Inclusive education the way of the future. (2008). UNESCO International Bureau of Education. http://www.ibe.unesco.org/fileadmin/user_upload/Policy_Dialogue/48th_ICE/General_Presentation-48CIE-English.pdf.
Mubin, O., Stevens, C.J., Shahid, S., Mahmud Al, A., Dong, J.-J.: A review of the applicability of robots in education. Technol. Educ. Learn. (2013). https://doi.org/10.2316/journal.209.2013.1.209-0015
Benitti, F.B.V.: Exploring the educational potential of robotics in schools: a systematic review. Comput. Educ. 58, 978–988 (2012). https://doi.org/10.1016/j.compedu.2011.10.006
Kubilinskiene, S., Zilinskiene, I., Dagiene, V., Sinkevičius, V.: Applying Robotics in school education: a systematic review. Balt. J. Mod. Comput. 5, 50–69 (2017). https://doi.org/10.22364/bjmc.2017.5.1.04
Xia, L., Zhong, B.: A systematic review on teaching and learning robotics content knowledge in K-12. Comput. Educ. 127, 267–282 (2018). https://doi.org/10.1016/j.compedu.2018.09.007
Miller, G., Church, R., Trexler, M.: Teaching diverse learners using robotics. In: Allison Druin, J.H. (ed.) Robots for Kids: Exploring New Technologies for Learning, pp. 165–192. Morgan Kaufmann, San Francisco (2000)
Syriopoulou-Delli, C., Gkiolnta, E.: Robotics and inclusion of students with disabilities in special education. Res. Soc. Dev. 10, e36210918238 (2021). https://doi.org/10.33448/rsd-v10i9.18238
Tlili, A., Lin, V., Chen, N.-S.N.S., Huang, R.: Kinshuk: a systematic review on robot-assisted special education from the activity theory perspective. Educ. Technol. Soc. 23, 95–109 (2020). https://doi.org/10.30191/ETS.202007_23(3).0008
Pliasa, S., Fachantidis, N., Maragkou, P.: Can children of typical development benefit from inclusion intervention with Daisy Robot-a socially assistive robot? In: ACM international conference proceeding series. pp. 235–240. Association for Computing Machinery (ACM) (2020). https://doi.org/10.1145/3439231.3439278
Datteri, E., Zecca, L., Laudisa, F., Castiglioni, M.: Learning to explain: the role of educational robots in science education. Themes Sci. Technol. Educ. 6, 29–38 (2013)
Díaz-Boladeras, M.: Bond formation with pet-robots: an integrative approach. Curr. Psychol. (2022). https://doi.org/10.1007/s12144-022-03792-7
Lindsay, S., Kolne, K., Oh, A., Cagliostro, E.: Children with disabilities engaging in STEM: exploring how a group-based robotics program influences STEM activation. Can. J. Sci. Math. Technol. Educ. 19, 387–397 (2019). https://doi.org/10.1007/s42330-019-00061-x
Pivetti, M., Di Battista, S., Agatolio, F., Simaku, B., Moro, M., Menegatti, E.: Educational Robotics for children with neurodevelopmental disorders: a systematic review. Heliyon. 6, e05160 (2020). https://doi.org/10.1016/j.heliyon.2020.e05160
Papakostas, G.A., Sidiropoulos, G.K., Papadopoulou, C.I., Vrochidou, E., Kaburlasos, V.G., Papadopoulou, M.T., Holeva, V., Nikopoulou, V.A., Dalivigkas, N.: Social robots in special education: a systematic review. Electron. 10, 1–36 (2021). https://doi.org/10.3390/electronics10121398
González-González, C.S., Violant-holz, V., Gil-iranzo, R.M.: social robots in hospitals : a systematic review. Appl. Sci. 11, 1–25 (2021). https://doi.org/10.3390/app11135976
Belpaeme, T., Kennedy, J., Ramachandran, A., Scassellati, B., Tanaka, F.: Social robots for education: a review. Sci. Robot. 3, 1–9 (2018). https://doi.org/10.1126/scirobotics.aat5954
Miguel Cruz, A., Ríos Rincón, A.M., Rodríguez Dueñas, W.R., Quiroga Torres, D.A., Bohórquez-Heredia, A.F.: What does the literature say about using robots on children with disabilities? Disabil. Rehabil. Assist. Technol. 12, 429–440 (2017). https://doi.org/10.1080/17483107.2017.1318308
Page, M.J., McKenzie, J.E., Bossuyt, P.M., Boutron, I., Hoffmann, T.C., Mulrow, C.D., Shamseer, L., Tetzlaff, J.M., Akl, E.A., Brennan, S.E., Chou, R., Glanville, J., Grimshaw, J.M., Hróbjartsson, A., Lalu, M.M., Li, T., Loder, E.W., Mayo-Wilson, E., McDonald, S., McGuinness, L.A., Stewart, L.A., Thomas, J., Tricco, A.C., Welch, V.A., Whiting, P., Moher, D.: The PRISMA 2020 statement: an updated guideline for reporting systematic reviews. BMJ (2021). https://doi.org/10.1136/bmj.n71
Van Den Heuvel, R.J.F., Lexis, M.A.S., De Witte, L.P.: Can the IROMEC robot support play in children with severe physical disabilities? A pilot study. Int. J. Rehabil. Res. 40, 53–59 (2017). https://doi.org/10.1097/MRR.0000000000000200
Van Den Heuvel, R., Lexis, M., De Witte, L.: Introducing ZORA to children with severe physical disabilities. In: Cudd, P., DeWitte, L. (eds.) harnessing the power of technology to improve lives: 14th conference of the association for the advancement of assistive technology in Europe (AAATE 2017). pp. 510–516. IOS Press (2017). https://doi.org/10.3233/978-1-61499-798-6-510
Van Den Heuvel, R.J.F., Lexis, M.A.S., de Witte, L.P.: ZORA robot based interventions to achieve therapeutic and educational goals in children with severe physical disabilities. Int. J. Soc. Robot. 12, 493–504 (2020). https://doi.org/10.1007/s12369-019-00578-z
Encarnação, P., Leite, T., Nunes, C., Nunes da Ponte, M., Adams, K., Cook, A., Caiado, A., Pereira, J., Piedade, G., Ribeiro, M.: Using assistive robots to promote inclusive education. Disabil. Rehabil. Assist. Technol. 12, 352–372 (2017). https://doi.org/10.3109/17483107.2016.1167970
Guneysu Ozgur, A., Özgür, A., Asselborn, T., Johal, W., Yadollahi, E., Bruno, B., Skweres, M., Dillenbourg, P.: Iterative design and evaluation of a tangible robot-assisted handwriting activity for special education. Front. Robot. AI. (2020). https://doi.org/10.3389/frobt.2020.00029
Adams, K., Cook, A.: Access to hands-on mathematics measurement activities using robots controlled via speech generating devices: three case studies. Disabil. Rehabil. Assist. Technol. 9, 286–298 (2014). https://doi.org/10.3109/17483107.2013.825928
Adams, K., Cook, A.: Using robots in “hands-on” academic activities: a case study examining speech-generating device use and required skills. Disabil. Rehabil. Assist. Technol. 11, 433–443 (2016). https://doi.org/10.3109/17483107.2014.986224
Adams, K.D., Cook, A.M.: Performing mathematics activities with non-standard units of measurement using robots controlled via speech-generating devices: three case studies. Disabil. Rehabil. Assist. Technol. 12, 491–503 (2017). https://doi.org/10.3109/17483107.2016.1151954
Pires, A.C., Rocha, F., De Barros Neto, A.J., Simão, H., Nicolau, H., Guerreiro, T.: Exploring accessible programming with educators and visually impaired children. In: Proceedings of the Interaction design and children conference, IDC 2020. pp. 148–160. Association for Computing Machinery (ACM), New York (2020). https://doi.org/10.1145/3392063.3394437
López Montellano, F., Molina Riazuelo, A.G., Mallo Robles, C.: Taller de robótica para alumnos con discapacidad visual de Educación Infantil y Primaria. Integración. 90–117 (2018). https://www.once.es/dejanos-ayudarte/la-discapacidad-visual/revista-integracion/2018-integracion-72-73/numero-73/73-06-lopez-molina-y-mallo-taller-de-robotica-para.pdf/download
Metatla, O., Bardot, S., Cullen, C., Serrano, M., Jouffrais, C.: Robots for inclusive play: co-designing an educational game with visually impaired and sighted children. In: Conference on human factors in computing systems: proceedings. pp. 1–13. Association for Computing Machinery (ACM), New York (2020). https://doi.org/10.1145/3313831.3376270
Knight, V.F., Wright, J., Wilson, K., Hooper, A.: Teaching digital, block-based coding of robots to high school students with autism spectrum disorder and challenging behavior. J. Autism Dev. Disord. 49, 3113–3126 (2019). https://doi.org/10.1007/s10803-019-04033-w
Amanatiadis, A., Kaburlasos, V.G., Dardani, C., Chatzichristofis, S.A.: Interactive social robots in special education. In: IEEE international conference on consumer electronics: Berlin, ICCE-Berlin. pp. 126–129 (2017). https://doi.org/10.1109/ICCE-Berlin.2017.8210609
Arshad, N.I., Hashim, A.S., Mohd Ariffin, M., Mohd Aszemi, N., Low, H.M., Norman, A.A.: Robots as assistive technology tools to enhance cognitive abilities and foster valuable learning experiences among young children with autism spectrum disorder. IEEE Access 8, 116279–116291 (2020). https://doi.org/10.1109/ACCESS.2020.3001629
Lehmann, H., Iacono, I., Dautenhahn, K., Marti, P., Robins, B.: Robot companions for children with down syndrome. Interact. Stud. Soc. Behav. Commun. Biol. Artif. Syst. 15, 99–112 (2014). https://doi.org/10.1075/is.15.1.04leh
Alves, T.R., Santos, E.A.: Teaching math for life to students with special needs: an experience with learning scenarios using robots. In: Chova, L.G., Martinez, A.L., Torres, I.C. (eds.) Iceri2015: 8th International conference of education, research and innovation. pp. 4089–4098 (2015). https://library.iated.org/view/ALVES2015TEA
Aslanoglou, K., Papazoglou, T., Karagiannidis, C.: Educational robotics and down syndrome: investigating student performance and motivation. In: ACM international conference proceeding series. pp. 110–116. Association for Computing Machinery (ACM), New York (2018). https://doi.org/10.1145/3218585.3218600
Bargagna, S., Castro, E., Cecchi, F., Cioni, G., Dario, P., Dell’Omo, M., Di Lieto, M.C., Inguaggiato, E., Martinelli, A., Pecini, C., Sgandurra, G.: Educational robotics in down syndrome: a feasibility study. Technol. Knowl. Learn. 24, 315–323 (2019). https://doi.org/10.1007/s10758-018-9366-z
González-González, C., Infante-Moro, A., González, E.H., Guzmán-Franco, M.D., Ruiz, L.M.: Teaching computational thinking to down syndrome students. In: GarciaPenalvo, F.J. (ed.) ACM international conference proceeding series. pp. 18–24. Association for Computing Machinery (ACM), New York (2018). https://doi.org/10.1145/3284179.3284191
Marti, P.: Storytelling at school with a robot playmate. In: GersbeckSchierholz, B., Wogerer, C., Schulz, S.G. (eds.) ACHI 2018: the eleventh international conference on advances in computer-human interactions. pp. 7–12. IARIA (2018). https://www.thinkmind.org/index.php?view=article&articleid=achi_2018_1_20_20135
Lehmann, H., Iacono, I., Robins, B., Marti, P., Dautenhahn, K.: “Make it move”: playing cause and effect games with a robot companion for children with cognitive disabilities. In: Dittmar, A., Forbrig, P. (eds.) ECCE 2011: European conference on cognitive ergonomics 2011: 29th annual conference of the european association of cognitive ergonomics. pp. 105–112. Universitätsdruckerei Rostock, Rostock (2011). https://doi.org/10.1145/2074712.2074734
Rangel, O.J.C., Batista, A.K.I., Salazar, M.R.E., Pinzon, T.C.I.: Application of pedagogical robotics in learning for children with special needs APRoLeCSNe. In: 2013 8th computing colombian conference (8CCC). pp. 1–6. IEEE Computer Society, Armenia (2013). https://doi.org/10.1109/ColombianCC.2013.6637533
Marti, P., Iacono, I.: Learning through play with a robot companion. In: Gelderblom, G.J., Soede, M., Adriaens, L., Miesenberger, K. (eds.) Everyday technology for independence and care: 11th European Conference of the association for the advancement of assistive technology in Europe (AAATE). pp. 526–533. IOS Press (2011). https://doi.org/10.3233/978-1-60750-814-4-526
Lindsay, S., Hounsell, K.G.: Adapting a robotics program to enhance participation and interest in STEM among children with disabilities: a pilot study. Disabil. Rehabil. Assist. Technol. 12, 694–704 (2017). https://doi.org/10.1080/17483107.2016.1229047
Lindsay, S., Lam, A.: Exploring types of play in an adapted robotics program for children with disabilities. Disabil. Rehabil. Assist. Technol. 13, 263–270 (2018). https://doi.org/10.1080/17483107.2017.1306595
Kert, S.B., Yeni, S., Fatih Erkoç, M.: Enhancing computational thinking skills of students with disabilities. Instr. Sci. 50, 625–651 (2022). https://doi.org/10.1007/s11251-022-09585-6
Hedgecock, J., Standen, P.J., Beer, C., Brown, D., Stewart, D.S.: Evaluating the role of a humanoid robot to support learning in children with profound and multiple disabilities. J. Assist. Technol. 8, 111–123 (2014). https://doi.org/10.1108/JAT-02-2014-0006
Estévez, D., Terrón-lópez, M.J., Velasco-quintana, P.J., Rodríguez-jiménez, R.M., Álvarez-manzano, V.: A case study of a robot-assisted speech therapy for children with language disorders. Sustain. 13, 1–20 (2021). https://doi.org/10.3390/su13052771
Díaz-Lauzurica, B., Moreno-Salinas, D.: Computational thinking and robotics: a teaching experience in compulsory secondary education with students with high degree of apathy and demotivation. Sustainability (2019). https://doi.org/10.3390/su11185109
Di Lieto, M.C., Castro, E., Pecini, C., Inguaggiato, E., Cecchi, F., Dario, P., Cioni, G., Sgandurra, G.: Improving executive functions at school in children with special needs by educational robotics. Front. Psychol. (2020). https://doi.org/10.3389/fpsyg.2019.02813
Brainin, E., Shamir, A., Eden, S.: Promoting Spatial language and ability among SLD Children: can robot programming make a difference? J. Educ. Comput. Res. 60, 1742–1762 (2022). https://doi.org/10.1177/07356331221083224
Díaz-Boladeras, M.: Bonding with robotic pets. Children’s cognitions, emotions and behaviors towards pet-robots. applications in a robot assisted quality of life intervention in a pediatric hospital. Dissertation. Universitat de Barcelona. (2017). http://hdl.handle.net/10803/461537
Kaburlasos, V.G., Vrochidou, E.: Social robots for pedagogical rehabilitation: trends and novel modeling principles. In: Dimitrova, M., Wagatsuma, H. (eds.) Cyber-physical systems for social applications. pp. 1–21. IGI Global, Pensylvania (2019)
Rossiter, R., Tait, N.: Revised guidance: gathering feedback and measuring outcomes and change with children and young People with learning disabilities, their families and networks. (2021) British Psychological Society Division of Clinical Psychology/Child Outcomes Research Consortium. https://www.corc.uk.net/media/2898/project-summary-gathering-feedback-and-measuring-outcomes-and-change-with-children-and-young-people-with-learning-disabilities.pdf
Gokhale, A.A., Rabe-Hemp, C., Woeste, L., Machina, K.: Gender differences in attitudes toward science and technology among majors. J. Sci. Educ. Technol. 24, 509–516 (2015). https://doi.org/10.1007/s10956-014-9541-5
Funding
Open Access funding provided thanks to the CRUE-CSIC agreement with Springer Nature. The authors did not receive support from any organization for the submitted work.
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. MD-B had the idea for the article, MG performed the literature search and quantitative data analysis, and ACiD and MD-B screened the references for eligibility and performed the qualitative systematic analyses of the selected works and elaborated the discussion. The first draft of the manuscript was written by MD-B and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Díaz-Boladeras, M., Claver i Díaz, A. & García-Sánchez, M. Robots for inclusive classrooms: a scoping review. Univ Access Inf Soc (2023). https://doi.org/10.1007/s10209-023-01065-z
Accepted:
Published:
DOI: https://doi.org/10.1007/s10209-023-01065-z