
Abstract
The mechanism of self-propelled particle motion has attracted much interest in mathematical and physical understanding of the locomotion of living organisms. In a top-down approach, simple time-evolution equations are suitable for qualitatively analyzing the transition between the different types of solutions and the influence of the intrinsic symmetry of systems despite failing to quantitatively reproduce the phenomena. We aim to rigorously show the existence of the rotational, oscillatory, and quasi-periodic solutions and determine their stabilities regarding a canonical equation proposed by Koyano et al. (J Chem Phys 143(1):014117, 2015) for a self-propelled particle confined by a parabolic potential. In the proof, the original equation is reduced to a lower dimensional dynamical system by applying Fenichel’s theorem on the persistence of normally hyperbolic invariant manifolds and the averaging method. Furthermore, the averaged system is identified with essentially a one-dimensional equation because the original equation is O(2)-symmetric.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Living organisms can move around without requiring external forces but by transforming chemical energy into kinetic energy. In physics, they can be considered as self-propelled particles [1]. Self-propelled motion can also be realized by artificial systems. As artificial self-propelled particles are more controllable than organisms, they have been intensively studied over the last decades [2]. Although the collective motion of self-propelled particles has been elucidated as active matter, the mechanism of the self-propelled motion of a single particle has also attracted much interest.
To analyze the mechanism of self-propelled motion, a bottom-up or top-down approach can be adopted. In the bottom-up approach, the mechanism of self-propelled particle motion is analyzed based on governing equations that describe elementary processes. This approach enables simulations based on governing equations to predict self-propelled motion quantitatively, but they are often complex. Moreover, it can be difficult to extract the principles of the mechanism. In contrast, simple time-evolution equations are suitable for qualitatively analyzing both the transition between different types of solutions and the influence of the intrinsic symmetry of systems, despite failing to quantitatively reproduce the phenomena. For example, a mathematical model was proposed in [3] to describe the dynamics of a deformable self-propelled particle. From the analyses of the model, the deformable particle can exhibit straight or circular motion depending on various parameters.
A remarkable property of a self-propelled system is symmetricity given the embedded symmetry of the self-propelled particle itself. If the front-rear symmetry of the particle is broken, the particle shows a preferred motion direction. For example, a Janus particle, which has different surface properties at each hemisphere, moves along the direction of particle polarization [4, 5]. A camphor boat, which is a plastic boat with a camphor pill attached at its rear, moves due to the surface tension difference between the front and rear [6,7,8]. In contrast, when a particle does not have an intrinsic asymmetry, it can potentially move in any direction depending on initial conditions. In other words, self-propelled motion is stable, but the direction of motion is neutral and selected through spontaneous symmetry breaking. A typical example is a droplet with inner chemical reactions and adsorption/desorption of chemicals on the surface; it exhibits a self-propelled motion owing to the Marangoni convection [9, 10]. Another example is a disk-shaped camphor particle, which exhibits a self-propelled motion in a direction determined by a slight initial anisotropy [7, 8, 11].
The symmetric property of the system boundary or geometry can also affect self-propelled motion. A living cell confined in a finite space shows a characteristic motion depending on the boundary shape [12, 13]. In chemical systems, a self-propelled particle or droplet also exhibits motion reflecting a boundary shape [14,15,16,17]. Not only boundaries but also potentials can confine a particle in an area [18]. When the system boundary or potential is asymmetric, it determines the direction of motion, like the asymmetry embedded in a self-propelled particle [16, 19]. On the other hand, a symmetric self-propelled particle in a symmetric space moves by spontaneous symmetry breaking.
In a two-dimensional system, a symmetric self-propelled particle confined in a space with rotational and inversion symmetry is interesting because it is a simple experimental setup and multiple types of motions can be realized, such as a circular motion along the periphery and a reciprocal motion across the system center. It was reported in [20] that when an aqueous droplet floating on an organic phase is locally heated by laser illumination, the droplet shows rotational or reciprocal motion around the illumination center depending on the laser intensity. A volatile drop on a swellable sheet exhibits reciprocal or rotational motion depending on the droplet size and the thickness of the film [21]. The rotational motion along a wall was observed for a self-propelled oil droplet in a surfactant aqueous solution in a semispherical dish [22] and a camphor disk confined in a circular region [15]. Moreover, droplets that exhibit quasi-periodic orbits have also been reported [14, 17]. In a theoretical approach, a self-propelled particle under a potential with rotational and inversion symmetries has been discussed [18, 23].
For generic investigations of two-dimensional motions of a self-propelled particle with rotational and inversion symmetries, the following equation of motion with a parabolic potential has been proposed [24]:
or equivalently,
where
\(a_1, \ldots , a_7 \in {\mathbb {R}},\) the prime \('\) denotes the derivative of the function with respect to t, and the inner product and norm in Euclidean spaces are represented by “\(\cdot \)” and \(|\cdot |,\) respectively. The position and velocity of a single particle at time t in two dimensions are denoted by \(\textbf{r}\) and \(\textbf{v},\) respectively. This equation is derived under the following three assumptions on \(f (\textbf{r}, \textbf{v})\):
-
(i)
\(f (\textbf{r}, \textbf{v})\) depends only on position \(\textbf{r}\) and velocity \(\textbf{v}\) of the particle.
-
(ii)
\(f (\textbf{r}, \textbf{v})\) is invariant under rotation and inversion transformations (O(2) symmetry).
-
(iii)
\(f (\textbf{r}, \textbf{v})\) is approximated by a Taylor series of \((\textbf{r}, \textbf{v})\) up to the third order.
Assumption (ii) is stated more precisely as follows; \(f (\textbf{r}, \textbf{v})\) commutes with a nontrivial linear action on \({{\mathbb {R}}}^2\) and satisfies \(f ({\mathcal {O}} \textbf{r}, {\mathcal {O}} \textbf{v}) = {\mathcal {O}} f (\textbf{r}, \textbf{v})\) for any \({\mathcal {O}} \in O(2),\) where the set of orthogonal matrices on \({{\mathbb {R}}}^2\) is expressed by O(2). Assumption (iii) is verified mathematically or physically in several cases. For example, let stationary solution \((\textbf{r}, \textbf{v}) = 0\) yield a stable periodic solution \((\textbf{r} (t), \textbf{v} (t))\) via the destabilization by Hopf bifurcation at \(a_1 = 0,\) where the double Hopf bifurcation occurs more precisely. Given that \((\textbf{r} (t), \textbf{v} (t))\) must stay near the origin as far as \(a_1 > 0\) is close to 0, the statement in Assumption (iii) does hold. In this case, we can derive a usual canonical system associated with the double Hopf bifurcation [25, 26]. Various previous studies have revealed the existence of both periodic and quasi-periodic solutions in the canonical system. Hence, it looks unnecessary to study (1) for small \(a_1 > 0.\) Nevertheless, it has not been fully elucidated what happens in (1) for positive \(a_1\) far from 0.

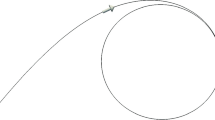
Various trajectories of the solutions of (1) in the phase space \(\textbf{r}.\) a Oscillatory \((a_5 = -3),\) b quasi-periodic \((a_5 = -2.6)\) and c rotational solutions \((a_5 = -1.5).\) The solid lines indicate the trajectories. For the numerical simulations, the parameters were given by \((a_1, a_2, a_3, a_4, a_6, a_7) = (2, 0, -5, 0, 1, 0).\) Time discretization was performed using the fourth-order Runge–Kutta method with time increment of 0.003
In [24], the authors carried out numerical simulations and showed that the solutions of (1) are categorized into various types under qualitative properties. Making the same assumptions as in [24], we set \(a_2 = a_4 = a_7= 0,\) \(a_1 > 0,\) and \(a_5 < 0\) throughout this manuscript. We say that a nonconstant periodic function \(\textbf{r}\) is a rotational solution if \(|\textbf{r} |\) and \(|\textbf{v} |\) are independent of t, while it is an oscillatory solution if there is a fixed unit vector \(\textbf{e}\) such that \(\textbf{r} \cdot \textbf{e} = 0\) for all t. Figure 1a and c show those periodic solutions. As shown in Fig. 4 of [24] and by weakly nonlinear analysis, (1) exhibits either of two periodic solutions in the wide range of parameter region \(a_3< 0\) and \(a_5 < 0.\) Meanwhile, a quasi-periodic solution like that shown in Fig. 1b appears in a small region of parameter values. The quasi-periodic solution emerges via bifurcation from the rotational and oscillatory solutions, strongly suggesting that it connects the two periodic solutions in the phase diagram. This also implies that (1) undergoes Neimark–Sacker bifurcation [27]. We aim to show the existence of rotational, oscillatory, and quasi-periodic solutions, determine their stabilities, and rigorously clarify the bifurcation structure in (1).
It is convenient to express (1) as a dynamical system with polar coordinates. Let \((\theta _1, \theta _2, \theta _3, E)\) be new variables satisfying
In addition, let \((p, q, \varepsilon _1, \varepsilon _2) = (a_1, a_5, a_6, a_3 - a_5)\) and suppose \(p > 0\) and \(q < 0.\) In this manuscript, we are devoted to the rigorous analysis of the existence and stability of not only two periodic solutions, the rotational and oscillatory solutions, but also the quasi-periodic solution in (1), which can emerge only in a small parameter region as stated above. By bearing in mind that the bifurcation points are located at \(\varepsilon \equiv (\varepsilon _1, \varepsilon _2) = 0\) in Fig. 4 (a) and (c) of [24], \(\varepsilon \) is supposed to be close to 0. By setting \(\theta = (\theta _1, \theta _2, \theta _3)\) and \(x = p + q E,\) the dynamical system given by (1) can be rewritten as follows:
where \(f_j = f_j (\theta , x; \varepsilon )\) \((j = 1, 2, 3, 4)\) are given by
with \((F, R, V) = (F, R, V) (\theta , x)\) being
Functions F, R, and V can be represented by the original variables, \(\textbf{r}\) and \(\textbf{v},\) as \(F = \textbf{r} \cdot \textbf{v},\) \(R = |\textbf{r} |^2,\) and \(V = |\textbf{v} |^2.\) In addition, E is equal to \(R + V.\) In the change of variables between \((\textbf{r}, \textbf{v})\) and \((\theta , x),\) we require \(\theta _3 \in [0, \pi /2]\) because \(\cos \theta _3\) and \(\sin \theta _3\) must be nonnegative. Hence, we consider (3) as a dynamical system of \((\theta , x) \in S^1 \times S^1 \times [0, \pi /2] \times {{\mathbb {R}}},\) where \(S^1 \equiv {{\mathbb {R}}}/ 2 \pi \mathbb {Z}.\)
An underlying mathematical structure in (3) is the existence of a three-dimensional compact invariant manifold, \(M_0,\) for \(\varepsilon = 0\) explicitly given by \(x = 0.\) On \(M_0,\) there exist rotational and oscillatory solutions as well as a one-parameter family of periodic solutions with period \(2 \pi ,\) whose trajectories form elliptic shapes in phase space \(\textbf{r}.\) These periodic solutions on \(M_0\) satisfy the simple Hamilton system \(\textbf{r}' = \textbf{v}\) and \(\textbf{v}' = - \textbf{r}.\) As such a Hamiltonian structure is readily broken by perturbation in general, we should pay careful attention to the persistence of such periodic solutions in the case of \(\varepsilon \ne 0.\) Hence the existence of periodic and quasi-periodic solutions in (3) is generically unknown. Furthermore, the stabilities of the periodic and quasi-periodic solutions are difficult to determine.
To achieve our goal, we handle (3) by applying Fenichel’s theorem on the persistence of invariant manifolds [28]. As shown in Sect. 2, the manifold \(M_0\) is normally hyperbolic, and it follows that there exists a perturbed invariant manifold M in (3) such that M is given by the graph of a function \(c = c (\theta , \varepsilon )\) for sufficiently small \(|\varepsilon |\ne 0\) and attracts the solutions near M (see Theorem 7). Therefore, the dynamics of the solutions in (3) is essentially restricted to M. Substituting \(x = c (\theta , \varepsilon )\) into (3), we obtain
When we study (4), it may be convenient to expand \(c (\theta , \varepsilon )\) as a Taylor series:
where the Landau’s symbol \(O (\rho )\) denotes a function of \(\rho \) estimated as \(|O (\rho ) |\le C \rho \) in sufficiently small \(\rho \ge 0\) for some constant \(C > 0.\)
For solution \(\theta (t)\) in (4), we introduce variables \({\tilde{t}} = - \theta _1 (t),\) \(\phi ({\tilde{t}}) = \theta _2 (t) - \theta _1 (t) \in S^1,\) and \(\psi ({\tilde{t}}) = \theta _3 (t) \in [0, \pi /2].\) We define Poincaré map \(P (\phi _0, \psi _0) = (\phi (2 \pi ), \psi (2 \pi ))\) for \((\phi _0, \psi _0) \equiv (\phi (0), \psi (0)).\) If \(|\varepsilon |\) is sufficiently small, variables \({\tilde{t}}, \phi , \psi \) and map P are well-defined. These facts are described in Sect. 4. Using P, we name the typical solution, \(\theta (t),\) of (4). If \((\phi , \psi )\) is identically equal to \((\pi /2, \pi /4),\) \(\theta (t)\) is called the rotational solution because it is associated with the rotational solution in (1). Similarly, we call \(\theta (t)\) for \(\phi = 0, \pi \) or \(\psi = 0, \pi /2\) the oscillatory solution. The rotational and oscillatory solutions exist in (4) and are realized by the fixed points of P. Finally, we call \(\theta (t)\) a quasi-periodic solution if there is a closed curve \(\gamma \) in the phase plane of \(\phi \) and \(\psi \) such that it satisfies the following four conditions;
-
1.
\(\gamma \) is P-invariant (i.e., \(P \gamma = \gamma \)).
-
2.
\(\gamma \) is invariant by any rotational transformation based on the O(2) symmetry in (1).
-
3.
\(\gamma \) does not contain either the rotational or oscillatory solution.
-
4.
\((\phi , \psi )\) lies on \(\gamma \) for all t.
This definition is applied even when \(\theta (t)\) has a period. In particular, \(\theta (t)\) for \(\varepsilon = 0\) has a \(2 \pi \) period because it can be explicitly written as \(\theta (t) = (\theta _{10}, \theta _{10}, 0) + (- t, - t + \phi , \psi )\) for constants \(\theta _{10} \in S^1, \phi , \psi .\) In this case, \(\gamma \) consists of the fixed points of P. Such a periodic solution probably loses its periodicity and becomes a real quasi-periodic solution by a slight change in \(\varepsilon \) if \(\gamma \) persists despite the perturbation. Thus, we adopt the abovementioned definition of the quasi-periodic solution.
From the geometrical viewpoint, \(\phi \) and \(\psi \) are the key factors to determine the trajectories of the rotational, oscillatory, and quasi-periodic solutions. Parameter \(\phi \) is the shear element in a shear matrix, and \(\psi \) is associated with the ratio of the diagonal elements in a diagonal matrix that operates on vector spaces by stretching or compressing axes. This interpretation naturally follows from
where \({\tilde{\theta }} (t; \phi , \psi ) \equiv (- t, -t + \phi , \psi )\) and \(\textbf{r} ({\tilde{\theta }} (t; \phi , \psi ))\) is given by substituting \(\theta = {\tilde{\theta }} (t; \phi , \psi )\) in (2). We may use \({\tilde{\theta }} (t) = {\tilde{\theta }} (t; \phi , \psi )\) for simplicity.
We can now state the two main theorems of this manuscript. The following functions of \(\varphi \in [0, \pi ]\) are indicators for the existence and stability of the oscillatory and quasi-periodic solutions in (4):
As shown in Sect. 4, \(H_0 (\varphi ; \varepsilon ) \) and \({\tilde{H}}_0 (\varphi ; \varepsilon ) \) are \(C^1\) in \(\varphi \in [0, \pi ].\) In the following first theorem, we state the stability of the rotational and oscillatory solutions in (4). The stability of the solutions is formulated in a usual sense by P and is often called asymptotic orbital stability [29]. We need to carefully consider the stability of the oscillatory solution because one of the eigenvalues of the linearized matrix for P around the oscillatory solution must be 1 owing to the O(2) symmetry.
Theorem 1
If \(\varepsilon _1\) and \(\varepsilon _2\) are sufficiently small, then the following statements hold for (4):
-
(i)
If \((p^2 + 4) \varepsilon _1 + 4 \varepsilon _2 < 0\) \((>0),\) the rotational solution is asymptotically orbitally stable (unstable).
-
(ii)
If \(\dfrac{{\partial }H_0}{{\partial }\varphi } (0; \varepsilon ) < 0\) \((> 0),\) the oscillatory solution is asymptotically orbitally stable (unstable).
In the second theorem, we show the existence and stability of a quasi-periodic solution in (4). Let us clarify the meaning of the stability of the quasi-periodic solutions in (4). We say that the quasi-periodic solution associated with a closed curve \(\gamma \) is stable in shape if \(P^n (\phi _0, \psi _0) \rightarrow \gamma \) as \(n \rightarrow \infty \) for any \((\phi _0, \psi _0)\) near \(\gamma .\) We define the instability in shape of the quasi-periodic solution similarly. As stated in Section 4 of [25], the analysis of the dynamics of P near \(\gamma \) is generally involved with resonance effects and is highly complex. We need further discussions to determine the stability of the quasi-periodic solutions in (4) in a Lyapunov sense. Actually, we readily verify that the solution orbit of \(\textbf{r} ({\tilde{\theta }} (t; \phi ({\tilde{t}}), \psi ({\tilde{t}})))\) over \(t \in [t_0, t_0 + 2 \pi ]\) for any \(t_0\) forms an almost elliptic shape if \((\phi , \psi )\) is close to \(\gamma \) (Fig. 1b). Thus, we adopt the weaker definition above instead of the asymptotic orbital stability and add the term “in shape” in this manuscript.
Theorem 2
Suppose that there is \(\varphi \in (0, \pi /2)\) such that \(H_0 (\varphi ; \varepsilon ) = 0\) and \(\dfrac{{\partial }H_0}{{\partial }\varphi } (\varphi ; \varepsilon ) \ne 0.\) If \(\varepsilon _1\) and \(\varepsilon _2\) are sufficiently small, then there exists a quasi-periodic solution \(\theta _\varepsilon \) in (4). Moreover, the following statements hold :
-
(i)
If \(\dfrac{{\partial }H_0}{{\partial }\varphi } (\varphi ; \varepsilon ) < 0\) \(( > 0),\) then \(\theta _\varepsilon \) is stable (unstable) in shape.
-
(ii)
If \({\tilde{H}}_0 (\varphi ; \varepsilon ) \ne 0,\) then there exist sequences \(\{ \varepsilon _n \}\) and \(\{ \varepsilon _n' \}\) with \(\varepsilon _n \rightarrow 0\) and \(\varepsilon _n' \rightarrow 0\) as \(n \rightarrow \infty \) such that \(\theta _{\varepsilon _n}\) is a periodic solution while \(\theta _{\varepsilon _n'}\) has no period, that is, it is a real quasi-periodic solution.
We briefly summarize the proofs of Theorems 1 and 2. First, (3) is replaced with (4) by the restriction on three-dimensional manifold M. We can further reduce the dimension of the system. The first key mathematical tool is the averaging method [25]. By substituting (5) into (4) and renaming \({\tilde{t}} = t,\) we can derive the averaged system for (4) as follows:
where
As described precisely in Sect. 4, the averaged system approximates the original equation if \(\varepsilon _1\) and \(\varepsilon _2\) are sufficiently small, implying that the two-dimensional dynamical system given by (9) dominates the behavior of the solutions of an inhomogeneous three-dimensional system (4) (see Proposition 11).
Next, we propose a change of variables based on the O(2) symmetry in (1). As detailed in Sect. 3, we show that variables \(\phi , \psi \) in (6) are connected to parameters \({\alpha }, \varphi , \omega \) as follows:
Parameters \(\varphi \) and \(\omega \) are geometrically interpreted as a shear element in a shear matrix and an angle in a rotation matrix, respectively, while \({\alpha }\) is not responsible for the shape of the solution trajectory of \(\textbf{r} ({\tilde{\theta }} (t; \phi , \psi )).\) Incredibly, (9) can be rewritten as a dynamical system of \((\varphi , \omega )\):
Lemma 12 shows that the right-hand sides of (12) are independent of \(\omega .\) A system like that described by (12) is often called a unidirectionally coupled system or a master–slave configuration [30]. In this sense, (12) essentially describes a one-dimensional dynamical system, facilitating the analysis of (9). Thus, we obtain Theorems 1 and 2.
Various mathematical aspects are contained in (1). For instance, (1) is an axisymmetric system in the following sense [24]. It is well-known that O(2) is isomorphic to group \(S^0 \times SO(2),\) where \(S^0 = \left\{ \left( {\begin{matrix} \pm 1 &{} 0 \\ 0 &{} 1 \end{matrix}} \right) \right\} \) is associated with reflection while SO(2) is the special orthogonal group, or, equivalently, the rotation group that consists of rotational matrices. The reflection invariance of (1) allows restricting the region of \(\phi \) to \([0, \pi ].\) Similarly, the rotational invariance is related to the right-hand sides of (12) being independent of \(\omega .\) The dynamical systems with such symmetries were handled in [31]; for example, the Hopf/Hopf interaction for the Birkhoff normal form was studied, and the equilibrium points and periodic orbits were categorized by isotropy subgroups (see also [32]). Several symmetries of the systems have been applied [33,34,35]. Thus, symmetricity in equations provides diverse benefits despite their results being established mainly based on the local bifurcation theory and not applicable to our cases.
The cubic nonlinearity of (1) has aspects of the van der Pol and Duffing equations, which are generators of nonlinear oscillation and exhibit stable limit cycles [25]. Among combinations of two oscillators, linear coupling systems have been the most treated [36,37,38,39,40]. In addition, interactions different from linear coupling have also been considered [41,42,43]. Formal calculations and weakly nonlinear analysis have been used in many studies. We refer to [44] for the global bifurcation of a limit cycle at infinity and the global phase portraits in almost the same situation as in this manuscript but with \(\textbf{r} \in {{\mathbb {R}}}\) and \(a_6 = 0.\)
Six nonlinear terms in (1) have been categorized into two parts [24]. The three cubic terms, \(a_3 |\textbf{v} |^2 \textbf{v},\) \(a_5 |\textbf{r} |^2 \textbf{v},\) and \(a_6 (\textbf{r} \cdot \textbf{v}) \textbf{r},\) represent nonlinear frictions and strongly affect the mathematical properties of the (quasi-)periodic solutions. On the other hand, we can define a conserved quantity from the other terms when \(a_1 = a_3 = a_5 = a_6 = 0.\) Hence, the parameters may be divided into two groups: \((a_3, a_5, a_6)\) and \((a_2, a_4, a_7).\) In general, periodic solutions in a dynamical system with a conservation law are realized by closed curves that correspond to the level set of a functional. Many studies have been associated with Hamiltonian systems [25, 45,46,47]. Those previous works may be helpful for the analysis of (1) when we deal with the case of \(a_1 = a_3 = a_5 = a_6 = 0.\) In this study, we focus on the characterization of the role of \((a_3, a_5, a_6)\) in (1).
The remainder of this manuscript is organized as follows. In Sect. 2, we show that Fenichel’s theorem on the persistence of invariant manifolds applies to (3) by adding a trivial equation for \(\varepsilon .\) According to Theorem 3.3.1 in [28], it is essential to estimate two generalized Lyapunov-type numbers, from which invariant manifold \(M_0\) is normally hyperbolic when \(\varepsilon = 0.\) Finally, we prove Theorem 7. In Sect. 3, we clarify the relations between \((\phi , \psi )\) and \(({\alpha }, \varphi , \omega )\) in (11) (Lemmas 8 and 9). In Sect. 4, we first transform (4) into a system described by (42). Applying the averaging method to (42), we obtain (43) and then derive the dynamical system given by (12). We then study (12) and complete the proofs of Theorems 1 and 2. Finally, we show the graphs of \(H_0\) and \({\tilde{H}}_0\) in (12) in Figs. 2 and 3 by using the Wolfram Mathematica® software [48]. These graphs indicate that the assumptions in Theorems 1(ii) and 2 hold only in a specific parameter region. Moreover, we find that the first equation of (12) can cause saddle-node bifurcation, which means that (12) is a typical example of a system with a quasi-periodic saddle-node bifurcation [49].
2 Normally hyperbolic invariant manifold
The goal of this section is to show the existence, smoothness, and exponential attractivity of an invariant manifold in (3), which will be precisely stated in Theorem 7. We first modify (3) into a suitable form to derive the differentiability of an invariant manifold not only in a local coordinate \(\theta \) but also with respect to the parameter \(\varepsilon .\) Let \(\chi = \chi (z)\) be a smooth function on \({\tilde{S}}^1 \equiv {{\mathbb {R}}}/ (4 \mathbb {Z})\) such as
Using a new parameter \(\textbf{e} \equiv (e_1, e_2) \in ({\tilde{S}}^1)^2,\) we replace \(\varepsilon _i\) in (3) into \(\varepsilon _0 \chi (e_i)\) for \(i = 1, 2.\) Trivially, if \(|\varepsilon _i |\le \varepsilon _0\) for \(i = 1, 2,\) \(e_i = \varepsilon _i / \varepsilon _0\) satisfies \(\varepsilon _i = \varepsilon _0 \chi (e_i).\) Adding a simple differential equation for \(\textbf{e}\) to (3), we consider
where \(g_i (\theta , x, \textbf{e}; \varepsilon _0) = f_i (\theta , x; \varepsilon _0 \chi (e_1), \varepsilon _0 \chi (e_2)).\) We think of (13) as a dynamical system of \((\theta , \textbf{e}, x)\) on \((S^1)^3 \times ({\tilde{S}}^1)^2 \times {{\mathbb {R}}}.\) Although the domain of \(\theta _3\) is extended from \([0, \pi /2]\) to \(S^1,\) the requirement is naturally fulfilled that \(\theta _3\) should be restricted to \([0, \pi /2]\) in the transformation (2) because the region \([0, \pi /2]\) for \(\theta _3\) is invariant in (3) and (13) by the fact that \(f_3 (\theta , x; \varepsilon ) = g_3 (\theta , x, \textbf{e}; \varepsilon _0) = 0\) on \(\theta _3 = 0, \pi /2.\) Therefore the extension of the domain of \(\theta _3\) does not cause any problems in our analysis. To achieve the goal, we will restrict x to the region \(\{ x \in {{\mathbb {R}}}\ |\ |x |\le \delta \}.\) Throughout this section, for given sufficiently small \(\delta > 0,\) \(\varepsilon _0\) is supposed to be sufficiently small dependently on \(\delta .\)
We follow the same arguments as in Section 3 of [28] and use the notation \(u \equiv (\theta , \textbf{e}, x).\) We apply Theorem 3.3.1 in [28], which is Fenichel’s theorem on the persistence of invariant manifolds. When we check all assumptions in the theorem, it is important to estimate the generalized Lyapunov-type numbers \(\nu (u_0)\) and \(\sigma (u_0)\) in \(u_0 \in M_0.\) Denote the general constant independent of \(\delta , \varepsilon _0, u\) by C for simplicity. We first estimate the right-hand side of (13) by \(G (u; \varepsilon _0).\) Let \(r \ge 1\) be an arbitrary integer. We readily see that \(G (u; \varepsilon _0)\) is \(C^r\) and
uniformly in \((\theta , \textbf{e}) \in (S^1)^3 \times ({\tilde{S}}^1)^2\) and \(|x |\le \delta ,\) where the derivative with respect to u is represented by D, and \(\Vert \cdot \Vert \) is the usual operator norm.
Next we consider (13) in \(\varepsilon _0 = 0.\) Since the invariant manifold for (3) is given by \(x = 0,\) \(M_0 = (S^1)^3 \times ({\tilde{S}}^1)^2 \times \{ 0 \}\) is invariant in (13). Then \(M_0\) is compact and boundaryless (see Chapter 6.2 in [28]). We define the generalized Lyapunov-type numbers \(\nu (u_0)\) and \(\sigma (u_0).\) Let \(\phi _t (u_0)\) be the solution of (13) for \(\varepsilon _0 = 0\) with an initial value \(u_0 \in (S^1)^3 \times ({\tilde{S}}^1)^2 \times {{\mathbb {R}}}\) at \(t = 0.\) It is easy to see \(\phi _t (u_0) = (\theta (t), \textbf{e}, 0)\) and \(\theta (t) = \theta _0 + (-t, -t, 0)\) for \(u_0 = (\theta _0, \textbf{e}, 0) \in M_0.\) The normal bundle over \(M_0\) is given by \(N \equiv \{ (u_0, w) \ |\ w = k w_*, u_0 \in M_0, k \in {{\mathbb {R}}}\},\) where \(w_* = (0, 0, 0, 0, 0, 1).\) The tangent bundle of \((S^1)^3 \times ({\tilde{S}}^1)^2 \times {{\mathbb {R}}}\) splits into two subbundles as \(T ((S^1)^3 \times ({\tilde{S}}^1)^2 \times {{\mathbb {R}}}) = T M_0 \oplus N,\) where \(\oplus \) denotes the Whitney sum of vector bundles. Let \(\Pi : T ((S^1)^3 \times ({\tilde{S}}^1)^2 \times {{\mathbb {R}}}) \rightarrow N\) be the orthogonal projection operator explicitly defined by \(\Pi _{u_0} u = (u \cdot w_*) w_*.\) The derivative of \(\phi _t (u_0)\) with respect to \(u_0\) is denoted by \(\psi _t (u_0).\) We may identify \(\psi _t (u_0)\) with the Jacobi matrix of \(\phi _t (u_0).\) Then, \(\psi _t (u_0)\) satisfies
We define two linear operators for each \(u_0 \in M_0\) by
Thanks to Lemma 3.1.1 in [28], \(\nu (u_0)\) and \(\sigma (u_0)\) are given by
We note that the formula above for \(\sigma (u_0)\) is well-defined in case of \(\nu (u_0) < 1.\)
To obtain an explicit form of \(B_t (u_0),\) the function \(W (t) \equiv (\psi _{-t} (u_0) w_*) \cdot w_*\) is useful. It follows from (14) that
Since \(\psi _0 (u_0)\) is an identity matrix, we see \(W (0) = 1\) and then
From this fact, we set \(w_0 = k w_*\) for \(k \in {{\mathbb {R}}}\) and have
As shown in Section 3 of [28], we find \(w_0 = B_t (u_0) w_{-t}\) and that the norm of \(B_t (u_0)\) is defined by
To estimate the integral in (16), let us rather consider a general case. Let \({\bar{x}} = {\bar{x}} (t)\) be a continuous and bounded function in \(t \in {{\mathbb {R}}}\) and fix \(\textbf{e} \in ({\tilde{S}}^1)^2.\) We substitute \(x = {\bar{x}}\) into the first and second equations of (13) and consider
Let \(\theta = \theta (t; {\bar{x}}, \varepsilon _0)\) be a solution of (17). We abbreviate the \(\textbf{e}\)-dependency of \(\theta \) for simplicity. Define
Clearly, \(\Vert B_t (u_0) \Vert = T (0, -t; 0, 0).\) The function \(T (t, s; {\bar{x}}, \varepsilon _0)\) is a key not only to estimating \(\Vert B_t (u_0) \Vert \) but also to proving the exponential attractivity of an invariant manifold constructed later.
Lemma 3
If \(\delta > 0\) is small and \(\varepsilon _0\) is sufficiently small dependently on \(\delta ,\) then there is \({\beta }_0 > 0\) independent of \(\delta , \varepsilon _0\) such that \({\kappa }(t; {\bar{x}}, \varepsilon _0) \ge {\beta }_0\) uniformly in \(t \in {{\mathbb {R}}},\) \(\textbf{e} \in ({\tilde{S}}^1)^2,\) continuous function \({\bar{x}} = {\bar{x}} (t)\) in \({{\mathbb {R}}}\) with \(\sup _{t \in {{\mathbb {R}}}} |{\bar{x}} (t) |\le \delta ,\) and the solution \(\theta \) of (17). In particular, \({\kappa }(t; 0, 0) = - \pi p / q.\)
Proof
In the following proof, we may abbreviate the \(({\bar{x}}, \varepsilon _0)\)-dependencies of the functions \(\theta , {\kappa }, T\) for simplicity. Denote the general constant independent of \(\delta , \varepsilon _0, \theta \) and \({\bar{x}}\) by C for simplicity. Give \(t \in {{\mathbb {R}}}\) and \(s \in [0, 2 \pi ]\) arbitrarily. We have
uniformly in \(t \in {{\mathbb {R}}}.\) Integrating the first equation of (17) over \((t, s + t),\) we have
for \(i = 1, 2.\) Then it follows from the inequality above that \(|\theta _i (t + s) - \theta _i (t) + s |\le C \delta .\)
We estimate \({\kappa }(t)\) from below as
where we denote \(\phi = \theta _2 (t) - \theta _1 (t)\) and \(\psi = \theta _3 (t + s).\) Obviously, there is an integer n such that \(s_n = \pi / 2 + 2 \pi n\) satisfies \(- \theta _1 (t) \le s_n < - \theta _1 (t) + 2 \pi .\) Suppose that \(0 \le \phi \le \pi / 4.\) If \(s_n \le - \theta _1 (t) + 7 \pi / 4,\) we see \(\pi / 4< s - \phi - 2 \pi n < 3 \pi / 4\) in \(s \in (s_n, s_n + \pi / 4).\) Hence we have
On the other hand, if \(s_n > - \theta _1 (t) + 7 \pi / 4,\) we see \(- 3 \pi / 4< s - \phi - 2 \pi n < - \pi / 4\) in \(s \in (s_n - \pi , s_n - 3 \pi / 4)\) and then
By the same argument as above, \({\kappa }(t)\) can be estimated in all other cases.
In the case of \({\bar{x}} \equiv 0\) and \(\varepsilon _0 = 0,\) \(g_i (\theta , 0, \textbf{e}; 0) = 0.\) Since \(\phi \) and \(\psi \) become constant in t, we readily verify \({\kappa }(t; 0, 0) = - \pi p / q.\) \(\square \)
Next we estimate \(T (t, s; {\bar{x}}, \varepsilon _0).\)
Lemma 4
Assume the same conditions as in Lemma 3. Set \({\beta }= - {\beta }_0 q / \pi \) for \({\beta }_0\) given in Lemma 3. Then, there exists \(C > 0\) independent of \(\delta , \varepsilon _0\) such that \(T (t, s; {\bar{x}}, \varepsilon _0) \le C e^{- {\beta }(t-s)}\) uniformly in \(t > s,\) \(\textbf{e} \in ({\tilde{S}}^1)^2,\) continuous function \({\bar{x}} = {\bar{x}} (t)\) in \({{\mathbb {R}}}\) with \(\sup _{t \in {{\mathbb {R}}}} |{\bar{x}} (t) |\le \delta ,\) and the solution \(\theta \) of (17). In particular, there are \(C_1, C_2 > 0\) such that \(C_1 e^{- p t} \le T (0, -t; 0, 0) \le C_2 e^{- p t}.\)
Proof
For \(s < t,\) there are \(t_0 \in [0, 2 \pi )\) and an integer k such that \(t = s + 2 \pi k + t_0.\) Then we see
from Lemma 3, which implies \(T (t, s; {\bar{x}}, \varepsilon _0) \le C e^{- {\beta }(t-s)}.\) Similarly, it is easy to show \(C_1 e^{- p t} \le T (0, -t; 0, 0) \le C_2 e^{- p t}\) for some \(C_1, C_2 > 0.\) \(\square \)
From (16) and the previous lemma, we have
This result implies \(\nu (u_0) < 1\) so that \(\sigma (u_0)\) can be defined by (15). We next compute \(\sigma (u_0).\) For each \(u_0 \in M_0,\) we see
Also, we find \(v_{-t} = \psi _{-t} (u_0) v_0.\) Then we compute
From the computations above, we can apply Fenichel’s theorem so that there exists a \(C^r\) connected invariant manifold M in (13) if \(\varepsilon _0\) is sufficiently small. Since \(M_0\) is coordinated by \((\theta , \textbf{e}) \in (S^1)^3 \times ({\tilde{S}}^1)^2,\) there exists \(c = c (\theta , \textbf{e}; \varepsilon _0)\) such that c is a \(C^r\) function of \((\theta , \textbf{e})\) and M is realized as the graph of c.
Next, we prove the exponential attractivity of M. We rewrite the last equation of (13) into an integral form. For \(\varepsilon _0 > 0,\) let \((\theta , \textbf{e}, x)\) be a solution of (13) and denote an initial value of x by \(x_0.\) Then we have
We prove that x(t) cannot leave away from M.
Lemma 5
If \(|x_0 |\le \delta \) and \(\varepsilon _0\) is sufficiently small, then there is \(C > 0\) independent of \(\delta , \varepsilon _0\) such that \(|x (t) |\le C \delta \) in \(t > 0.\)
Proof
From (18), we have
Applying the Gronwall’s inequality, we complete the proof of the lemma. \(\square \)
We derive an integral form from (13) for the solution on M, denoted by \((\theta _*, \textbf{e}_*, x_*).\) Here we fix \(t_0 \ge 0\) arbitrarily and suppose that \(\theta _* (t_0) = \theta (t_0)\) and \(\textbf{e}_* = \textbf{e}.\) Since \(x_* (t)\) is uniformly bounded in \(t \in {{\mathbb {R}}}\) due to the compactness of M, \(x_* (t)\) is the unique solution of
Next we estimate \(|x (t_0) - x_* (t_0) |.\)
Lemma 6
Suppose that \(|x_0 |\le \delta \) and \(\varepsilon _0\) is sufficiently small. For any \({\tilde{{\beta }}} < {\beta },\) there is \(C > 0\) independent of \(\delta , \varepsilon _0\) such that \(|x (t_0) - x_* (t_0) |\le C e^{- {\tilde{{\beta }}} t_0} (|x_0 |+ \varepsilon _0)\) in \(t_0 > 0.\)
Proof
We abbreviate the \((\textbf{e}, \varepsilon _0)\)-dependency of functions for simplicity. To begin with, we estimate \(\theta (t) - \theta _* (t)\) for \(t < t_0.\) Integrating the first and second equations of (13) over \((t, t_0),\) we obtain
Applying the Gronwall’s inequality, we see
Next we estimate \(|T (t_0, t; x) - T (t_0, t; x_*) |.\) Set \(\rho (s) = V (\theta (s; x), x (s))\) and \(\rho _* (s) = V (\theta (s; x_*), x_* (s))\) for simplicity. By the mean value theorem, there is \(\eta \in [0, 1]\) such that
It follows from Lemma 4 that
Then, for any \({\tilde{{\beta }}} < {\beta },\) there is \(C > 0\) such that
Finally we estimate \(x (t_0) - x_* (t_0).\) We compute
from (18) and (19). It follows from Lemma 4 that \(|T (t_0, 0; x) x_0 |\le C e^{- {\beta }t_0} |x_0 |.\) From (20) and (21), we obtain
and
It is easy to see
Hence we have
We apply the Gronwall’s inequality and see
\(\square \)
Finally, we only consider the case of \(|e_i |\le 1\) for \(i = 1, 2,\) which implies \(\varepsilon = \varepsilon _0 \textbf{e}\) as described at the beginning of this section. Rewriting \(c (\theta , \textbf{e}; \varepsilon _0)\) into \(c (\theta , \varepsilon )\) simply, we readily verify that \(c (\theta , \varepsilon )\) is \(C^r\) with respect to \(\theta \) and \(\varepsilon .\) Summarizing the results above, we prove the following theorem.
Theorem 7
Let \(r \ge 1\) be an arbitrary integer. If \(\delta > 0\) is small, then there exist sufficiently small \(\varepsilon _0 > 0\) and a \(C^r\) function \(c = c (\theta , \varepsilon )\) such that if \(|x_0 |\le \delta ,\) then the solution \((\theta (t), x (t))\) of (3) satisfies \(|x (t) - c (\theta (t), \varepsilon ) |\le C (|x_0 |+ \varepsilon _0) e^{- {\beta }t}\) uniformly in \(t > 0\) and \(|\varepsilon _i |\le \varepsilon _0\) for \(i = 1, 2,\) where \(x_0\) is the initial value of x at \(t = 0\) and \({\beta }, C > 0\) are constants independent of \(\delta , \varepsilon _0.\) Moreover, \(M \equiv \{ (\theta , x) \ |\ x = c (\theta , \varepsilon ) \}\) is invariant in (3).
Proof
As described at the beginning of this section, \(\theta _3\) can be restricted to \([0, \pi /2]\) in both (3) and (13). Therefore we complete the proof of Theorem 7 from Lemma 6. \(\square \)
We assume \(r \ge 3.\) This condition will be necessary when we expand \(c = c (\theta , \varepsilon )\) as (5) and apply the averaging method to (42). At the end of this section, we obtain the explicit forms of \(c_1\) and \(c_2.\) Let \(\theta (t)\) be a solution of (4). Differentiating the both sides of \(x (t) = c (\theta (t), \varepsilon )\) in t, we see
By substituting (5) into the equation above and collecting the first-order terms of \(\varepsilon _1\) and \(\varepsilon _2\) in the resulting equation, respectively, we see that \(c_1\) and \(c_2\) are governed by the first-order linear partial differential equations with the inhomogeneous terms given by
where \((\theta _1, \theta _2) \in S^1 \times S^1\) while \(\theta _3\) is nothing more than a parameter. It is easy to solve the equations above by the method of characteristics under the periodic boundary conditions. A characteristic curve is parametrized by a new variable \(s \in S^1\) and explicitly represented by \((- s, - s + \phi , \psi ) = {\tilde{\theta }} (s).\) Then we obtain
where \(\rho _1\) and \(\rho _2\) are defined by
When we emphasize the \((\phi , \psi )\)-dependency of \(\rho _1, \rho _2,\) we may denote \(\rho _1 (s) = \rho _1 (s; \phi , \psi )\) and \(\rho _2 (s) = \rho _2 (s; \phi , \psi ).\) Note that the function \(c_1 (\theta )\) is well-defined and smooth in \(S^1 \times S^1 \times [0, \pi /2],\) and is periodic in \(\theta _1, \theta _2 \in S^1\) because \(\rho _1 (0) = 1\) and \(\rho _1 (2 \pi ) = e^{- 2 \pi p}.\) Similarly, \(c_2 = c_2 (\theta )\) is defined by
3 Clarification of the relation between \(\phi , \psi \) and \({\alpha }, \varphi , \omega \)
The goal of this section is to clarify the relation between \(\phi , \psi \) and \({\alpha }, \varphi , \omega \) in (11). Based on the \(S^0\)-symmetricity in (1), we restrict the region of \(\phi \) and naturally assume \(\phi \in [0, \pi ]\) while \(\psi \) is supposed to be \(\psi \in [0, \pi /2]\) as described in Introduction. Then, the variables \({\alpha }, \varphi , \omega \) are supposed to be \({\alpha }\in [- \pi /2, \pi /2],\) \(\varphi \in [0, \pi ]\) and \(\omega \in [- \pi /4, \pi /4].\)
From (11), we have
The second equation leads to
It follows from the third and fourth equations that
Similarly, the first and fourth equations give us
Combining (25) and (26), we find
A relation
follows from (25), (27) and (28). From these observations, we define \(\varphi , \omega , {\alpha }\) in this order by
and
where \(\arcsin \) and \(\arctan \) denote the inverse functions of \(\sin : [-\pi /2, \pi /2] \rightarrow [-1, 1]\) and \(\tan : (- \pi /2, \pi /2) \rightarrow {{\mathbb {R}}},\) and \(\zeta \) is the step function satisfying \(\zeta (x) = - 1\) \((x \le 0)\) and \(\zeta (x) = 1\) \((x > 0).\)
Lemma 8
Give \(\varphi , \omega , {\alpha }\) by (30)–(32). Then they are well-defined and \(C^1\) in \(\phi \in [0, \pi /2) \cup (\pi /2, \pi ]\) and \(\psi \in [0, \pi /2],\) and satisfy (11).
Proof
To begin with, we check the statements in Lemma 8 for \(\phi \in [0, \pi /2)\) and \(\psi \in [0, \pi /2].\) We first consider \(\phi \in (0, \pi /2)\) and \(\psi \in (0, \pi /2).\) Obviously, \(0 < \varphi \le \arcsin (\sin \phi ) = \phi .\) If \(\psi \le \pi /4,\) then \(\omega \in (-\pi /4, 0]\) and \({\alpha }\in (-\pi /4, 0]\) because \(0 \le \phi - \varphi< \phi + \varphi < \pi \) and
By a similar argument, we can prove that \(\omega \in (0, \pi /4)\) and \({\alpha }\in (0, \pi /2)\) in \(\psi > \pi /4.\) Therefore \(\varphi , \omega \) and \({\alpha }\) in (30)–(32) are well-defined. By the arguments before Lemma 8, it is easy to see that (11) holds true.
Consider the limit of \(\phi \rightarrow 0\) with \(\psi \) fixed. It is easy to see \(\varphi \rightarrow 0.\) Then we find
for \(\psi \in [0, \pi /2].\) Also, we have \({\alpha }\rightarrow 0\) by
Then it is easy to take the limits of \(\psi \rightarrow 0\) and \(\pi /2,\) which implies that \(\varphi , \omega \) and \({\alpha }\) are continuous in \(\phi \in [0, \pi /2)\) and \(\psi \in [0, \pi /2].\)
Differentiating (28) and (29) by \(\phi ,\) we easily have
Similarly,
Using (29), we evaluate
as \(\phi \rightarrow 0.\) Hence \(\varphi \) and \(\omega \) are \(C^1\) in \(\phi \in [0, \pi /2)\) and \(\psi \in [0, \pi /2].\) On the other hand, we obtain
and
Due to (33), the partial derivatives of \(\alpha \) have no singularity except for \((\varphi , \omega )\) \(= (0, \pi /4).\) As shown above, \((\varphi , \omega )\) tends to \((0, \pi /4)\) as \((\phi , \psi ) \rightarrow (0, \pi /2).\) Then we find
Similarly, we easily see \(\lim _{(\phi , \psi ) \rightarrow (0, \pi /2)} {\partial }\alpha / {\partial }\psi = 0.\) Therefore we verify that \({\alpha }\) is \(C^1\) in \(\phi \in [0, \pi /2)\) and \(\psi \in [0, \pi /2].\) In the calculations above, we used the relations
A similar result in \(\phi \in (\pi /2, \pi ]\) is derived from the case above. Thanks to \(\pi - \phi \in [0, \pi /2),\) \({\alpha }, \varphi , \omega \) are defined by \((\pi - \phi , \psi ).\) Since
and
for \(a \in {{\mathbb {R}}},\) we see that \((\phi , \psi )\) and \((-{\alpha }, \pi - \varphi , -\omega )\) satisfy (11). It readily follows from the results in the case of \(\phi \in [0, \pi /2)\) that \(({\alpha }, \varphi , \omega )\) is \(C^1\) in \(\phi \in (\pi /2, \pi ].\) Thus we complete the proof of the lemma. \(\square \)
Remark 1
In the proof above, we have verified that \(\varphi \in [0, \phi ]\) and \({\alpha }\in [-\pi /4, \pi /2]\) in \(\phi \in [0, \pi /2)\) while \(\varphi \in [\phi , \pi ]\) and \({\alpha }\in [-\pi /2, \pi /4]\) in \(\phi \in (\pi /2, \pi ].\) In both cases, \(\omega \in [-\pi /4, \pi /4].\)
Remark 2
In Lemma 8, we do not consider \(\phi = \pi /2\) because \({\alpha }, \varphi \) and \(\omega \) defined in (30)–(32) are discontinuous and have the following limits;
This will be crucial in Sect. 4 when we discuss the relation between (9) and (12).
In Lemma 8, we considered the transformation from \((\phi , \psi )\) to \(({\alpha }, \varphi , \omega ).\) According to the equalities (25) and (34), \({\alpha }, \phi \) and \(\psi \) are represented by \(\varphi \) and \(\omega ,\) which is a kind of an inverse transformation in some sense. We give more precise definitions. Let \(D_0\) be a set that excludes four corners from a rectangle domain of \((\varphi , \omega ),\) that is,
We define \({\alpha }, \phi \) and \(\psi \) in \((\varphi , \omega ) \in D_0\) by
and
where \(\arccos \) is the inverse function of \(\cos : [0, \pi ] \rightarrow [-1, 1].\)
Lemma 9
Give \({\alpha }, \phi , \psi \) by (36)–(38). Then they are well-defined, \(C^1\) and satisfy (11) in \(D_0.\)
Proof
Direct calculations give us
Similarly, we have
By the same arguments as in Lemma 8, all statements in Lemma 9 hold true. \(\square \)
Remark 3
In the definitions of \({\alpha }, \phi ,\) and \(\psi ,\) the four corners are eliminated. For examples, \({\alpha }\) and \(\phi \) in (36) and (37) are discontinuous at \((\varphi , \omega ) = (0, \pi /4)\) and have the following limits;
On the other hand, \(\psi \) is continuous at all corners.
4 Reduction of (4) to (12)
The aims of this section are to reduce (4) to (12) and prove Theorems 1 and 2 by studying (12). We first find invariant regions of \(\theta _2 - \theta _1.\)
Lemma 10
Give \(\varepsilon \in {{\mathbb {R}}}^2\) arbitrarily. Let \((\theta (t), x (t))\) be a solution of (3). If \(0< \theta _2 (t_0) - \theta _1 (t_0) < \pi \) and \(x (t_0) < p\) for some \(t_0 \in {{\mathbb {R}}},\) then \(0< \theta _2 (t) - \theta _1 (t) < \pi \) in \(t \in {{\mathbb {R}}}.\) On the other hand, if \(\pi< \theta _2 (t_0) - \theta _1 (t_0) < 2 \pi \) and \(x (t_0) < p\) for some \(t_0 \in {{\mathbb {R}}},\) then \(\pi< \theta _2 (t) - \theta _1 (t) < 2 \pi \) in \(t \in {{\mathbb {R}}}.\)
Proof
Define
When we consider (1), the function \(\rho (t)\) corresponds to \(\textbf{r} (t) \times \textbf{v} (t),\) where “\(\times \)” means the exterior product for vectors, defined by \(\textbf{a} \times \textbf{b} = a_1 b_2 - a_2 b_1\) for \(\textbf{a} = (a_1, a_2)\) and \(\textbf{b} = (b_1, b_2).\) Direct calculation gives us
This differential equation indicates that the sign \(\rho (t)\) cannot change because of the uniqueness theorem. Thus we complete the proof of the lemma. \(\square \)
In order to get the averaged system (9), we first rewrite (4) to an inhomogeneous two-dimensional ordinary differential system. Since \(\varepsilon \) is supposed to satisfy \(|\varepsilon _i |\le \varepsilon _0\) for \(i = 1, 2,\) we rewrite \(\varepsilon \) into \(\varepsilon = {\tilde{\varepsilon }} \textbf{e},\) where \({\tilde{\varepsilon }}\) is a nonnegative parameter with \({\tilde{\varepsilon }} \le \varepsilon _0\) and \(\textbf{e} = (e_1, e_2)\) is a nonzero vector on \({{\mathbb {R}}}^2\) which satisfies \(|e_1 |\le 1\) and \(|e_2 |\le 1.\) It is easy to see that the solution \(\theta (t) = (\theta _1 (t), \theta _2 (t), \theta _3 (t))\) of (4) satisfies
If \(\varepsilon _0\) is sufficiently small, \(\theta _1\) decreases monotonically in t. Since there exists the inverse function \(\theta _1^{-1},\) the variables \({\tilde{t}}\) and \((\phi ({\tilde{t}}), \psi ({\tilde{t}}))\) in Introduction are well-defined. We see that \(\theta _2 (t) = \theta _1 (t) + \phi ({\tilde{t}}) = - {\tilde{t}} + \phi ({\tilde{t}})\) and
Then we obtain a system for \((\phi , \psi )\) given by
where
We see that \(g_1\) and \(g_2\) are at least \(C^2\) in \((\phi , \psi , {\tilde{t}}, \textbf{e}, {\tilde{\varepsilon }})\) because c is \(C^3.\) Note that
for \(i = 1, 2, 3.\) The argument above also implies that the Poincaré map P is well-defined as described in Sect. 1, that is, P is defined by the return map in the system (42) by adding the trivial equation \(d {\tilde{t}} / d {\tilde{t}} = 1\) on the transversal section \({\tilde{t}} = 0\) in the phase space \(({\tilde{t}}, \phi , \psi ) \in S^1 \times S^1 \times [0, \pi /2].\) Hereafter \((\phi , \psi )\) is supposed to be included in \([0, \pi ] \times [0, \pi /2]\) because of Lemma 10. We abbreviate the notation \({\tilde{t}}\) and \({\tilde{\varepsilon }}\) in (42) to t and \(\varepsilon \) for simplicity, respectively.
Since \(g_1\) and \(g_2\) are \(2 \pi \)-periodic in t, we can apply the averaging method to (42). To collect the first order terms of \(\varepsilon \) in (42), we replace c in the definitions of \(g_1\) and \(g_2\) with \(\varepsilon (e_1 c_1 + e_2 c_2).\) Integrating (42) with respect to t over \((0, 2 \pi ),\) we have the averaged system
which is essentially the same as (9). We compute \(g_1\) and \(g_2\) in the right-hand side of the equations above as
It is easy to obtain
Thus the functions \(h_1\) and \(h_2\) are given by (10).
It is well-known that the averaged system (43) is an approximation of (42). The next proposition is a combination of Theorem 4.1.1 and Theorem 4.4.2 in [25] with a bit modification.
Proposition 11
-
(i)
Let \((\phi , \psi )\) and \(({\bar{\phi }}, {\bar{\psi }})\) be the solutions of (42) and (43), respectively. Denote an arbitrary positive constant by \(C_0 > 0.\) Then there exists \(\varepsilon _0 > 0\) such that if \(|(\phi (t_0), \psi (t_0)) - ({\bar{\phi }} (t_0), {\bar{\psi }} (t_0)) |\) \(\le C_1 \varepsilon \) at some \(t_0,\) then \(|(\phi (t), \psi (t)) - ({\bar{\phi }} (t), {\bar{\psi }} (t)) |\le C_2 \varepsilon \) in \(|t - t_0 |\le C_0 / \varepsilon \) for \(\varepsilon \in [0, \varepsilon _0),\) where \(C_1, C_2 > 0\) are independent of \(\varepsilon , C_0.\)
-
(ii)
If \((\phi _*, \psi _*)\) is a hyperbolic steady state of (43), then there exists \(\varepsilon _0 > 0\) such that, for all \(\varepsilon \in (0, \varepsilon _0),\) P possesses a unique hyperbolic fixed point close to \((\phi _*, \psi _*).\) Moreover, the fixed point of P has the same stability type as \((\phi _*, \psi _*).\)
-
(iii)
If (43) has a hyperbolic periodic orbit \({\bar{\gamma }},\) then P has a P-invariant closed curve \(\gamma \) near \({\bar{\gamma }}.\) Moreover, if the periodic solution on \({\bar{\gamma }}\) is asymptotically orbitally stable (unstable) in (43), then the quasi-periodic solution associated with \(\gamma \) is stable (unstable) in shape in (4).
For the solution \((\phi , \psi )\) of (43), we can define \(\varphi , \omega \) determined by Lemma 8 as the functions of t. Next, we derive the two-dimensional dynamical system of \((\varphi , \omega )\) from (43). Differentiating the both sides of (29) by t, we find
Hence
Similarly, it follows from (28) that
from which
where we used (34). In the definitions above, it seems that \({\tilde{H}}\) has a singularity at \(\varphi = \pi /2.\) Nevertheless, the dynamical system (44) and (45) is well-defined in \(D_0\) as seen in the following lemma.
Lemma 12
The functions \(H, {\tilde{H}}\) are well-defined and \(C^1\) in \(D_0.\) Moreover it holds that \(\dfrac{{\partial }H}{{\partial }\omega } = \dfrac{{\partial }{\tilde{H}}}{{\partial }\omega } = 0.\)
Proof
Obviously, H is \(C^1\) in \(D_0\) by Lemma 9. Similarly, \({\tilde{H}}\) is \(C^1\) except for \(\varphi \ne \pi /2.\) From Lemma 9, \((\phi , \psi ) = (\pi /2, \pi /4)\) at \(\varphi = \pi /2.\) It is easy to see
Then,
Combining (39) and (48), we obtain
The L’Hospital’s rule yields
Hence \({\tilde{H}} (\varphi , \omega ; \textbf{e})\) is well-defined and continuous at \(\varphi = \pi /2.\) By the same arguments above, we also confirm that \({\tilde{H}} (\varphi , \omega ; \textbf{e})\) is \(C^1\) in \(D_0.\)
When we calculate the partial derivatives of \(H (\varphi , \omega ; \textbf{e})\) and \({\tilde{H}} (\varphi , \omega ; \textbf{e})\) with respect to \(\omega ,\) it is convenient to rewrite (7) into
because \(c_1 (\theta )\) and \(c_2 (\theta )\) are \(2 \pi \)-periodic with respect to \(\theta _1, \theta _2,\) where \({\alpha }\) is given by \(\phi , \psi \) in Lemma 8. It follows from (11) that
so that
The right-hand sides above are independent of \(\omega .\) It follows from (22) that \(u_1 (s) \equiv c_1 ({\tilde{\theta }} (s + {\alpha }; \phi , \psi ))\) for constants \({\alpha }, \phi , \psi \) satisfies
Differentiating the both sides above with respect to \(\omega ,\) we obtain
Solving this equation, we have
It follows from Lemma 4 that \({\partial }u_1 / {\partial }\omega \) must decay exponentially as s increases. However, since \(u_1\) is \(2 \pi \)-periodic in s, we see \({\partial }u_1 / {\partial }\omega \equiv 0,\) which implies that \(u_1\) is independent of \(\omega .\)
Differentiating (49) with respect to \(\omega \) results in
Combining (40) and (50), we have
Similarly, we obtain \(\dfrac{{\partial }{\tilde{H}}}{{\partial }\omega } = 0.\) \(\square \)
Thanks to the previous lemma, we can substitute \(\omega = 0\) into H and \({\tilde{H}}\) without loss of generality. Lemma 9 leads to \(\phi = \varphi \) and \(\psi = \pi /4.\) Denote \(H_0 (\varphi ; \textbf{e}) \equiv H (\varphi , 0; \textbf{e})\) and \({\tilde{H}}_0 (\varphi ; \textbf{e}) \equiv {\tilde{H}} (\varphi , 0; \textbf{e}),\) which are essentially the same as in (8). Thus we have derived the dynamical system (12) by replacing \(H (\varphi , \omega ; \textbf{e})\) in (44) and \({\tilde{H}} (\varphi , \omega ; \textbf{e})\) in (45) with \(H_0 (\varphi ; \textbf{e})\) and \({\tilde{H}}_0 (\varphi ; \textbf{e}),\) respectively. Since the right-hand sides of (12) are independent of \(\omega ,\) the dynamics of \(\varphi \) is determined only by the first equation of (12) while the second equation is thought of as a slave system of \(\varphi .\) In this sense, (12) is essentially a type of a one-dimensional dynamical system.
We find some properties related to \(H_0 (\varphi ; \textbf{e})\) and \({\tilde{H}}_0 (\varphi ; \textbf{e}).\) The definitions of \(c_i\) directly imply \(c_i ({\tilde{\theta }} (s; \varphi , \pi /4)) < 0\) for \(i = 1, 2.\) Secondly, it is clear that \(q H_0 (\varphi ; \textbf{e})\) and \(q {\tilde{H}}_0 (\varphi ; \textbf{e})\) are independent of q. We next prove the reflection properties of \(H_0\) and \({\tilde{H}}_0\) at \(\varphi = \pi /2.\)
Lemma 13
For \(\varphi \in [0, \pi /2],\) \(H_0 (\varphi ; \textbf{e}) = - H_0 (\pi - \varphi ; \textbf{e})\) and \({\tilde{H}}_0 (\varphi ; \textbf{e}) = {\tilde{H}}_0 (\pi - \varphi ; \textbf{e}).\)
Proof
We first check an equality
It is easy to see
Similarly, we obtain
Let \(A = \rho _1 (\varphi ; \varphi , \pi / 4).\) Then we have
Those equalities above imply (51).
Thanks to the periodicity of \(c_i,\) we see
By a similar way, we can prove
Therefore the equations above conclude the lemma. \(\square \)
Although Lemma 12 implies that the dynamical system (12) is indeed well-defined in \(D_0,\) we have to pay careful attention to the flow on \(\omega = \pm \pi /4.\) Roughly speaking, we consider the identification
More precisely, we suppose that the solution \((\varphi , \omega )\) in (12) satisfies \(\varphi (t_0) = \varphi _0 \ne 0, \pi /2, \pi ,\) and \(\omega (t_0) = \pm \pi / 4\) for some \(t_0.\) If the nondegeneracy condition \({\tilde{H}}_0 (\varphi _0; \textbf{e}) \ne 0\) holds, then we reset \((\varphi (t_0), \omega (t_0)) = (\pi - \varphi _0, \mp \pi / 4)\) and give the solution of (12) in \(t > t_0.\) According to Remark 2, the continuity of the solution of (43) persists under the transformation from \((\varphi , \omega )\) to \((\phi , \psi )\) in spite that \((\varphi (t), \omega (t))\) is discontinuous at \(t = t_0.\) Therefore it is suitable to consider the dynamical system (12) under the identification (52). On the other hand, it is unnecessary to consider the identification in the degeneracy case \({\tilde{H}}_0 (\varphi _0; \textbf{e}) = 0\) because the solution of (12) does not arrive at \((\varphi _0, \pm \pi /4)\) as far as the initial value is not equal to either of them. Moreover, we do not consider the identification between \((\pi /2, \pm \pi /4)\) because \(\varphi = \pi /2\) brings the stationary solution \((\pi /2, \pi /4)\) in (43) for all \(\omega .\) Also, owing to \(H_0 (0; \textbf{e}) = {\tilde{H}}_0 (0; \textbf{e}) = 0,\) we do not need to deal with the dynamics on \((\varphi , \omega ) = (0, \pm \pi /4), (\pi , \pm \pi /4).\)
Now we are in a position to prove our main theorems. From (48), we have
The eigenvalue problem obtained by linearizing (43) around the stationary solution \((\phi , \psi ) = (\pi /2, \pi /4)\) possesses the eigenvalue \({\lambda }\) given by
from which we see that \((\phi , \psi ) = (\pi /2, \pi /4)\) is stable (unstable) in (43) if and only if \((p^2 + 4) \varepsilon _1 + 4 \varepsilon _2 < 0\) \((> 0).\) According to Proposition 11(ii), we complete the proof of Theorem 1(i).

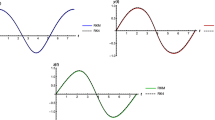
Graphs of a \(H_0 (\varphi ; \textbf{e})\) and b \({\tilde{H}}_0 (\varphi ; \textbf{e})\) for several \(e_1.\) For the solid, dashed and broken lines, we set \(e_1 = -0.77, -0.79, -0.81,\) respectively. Other parameters were given by \(p = 1, q = -1, e_2 = 1\)
We next prove Theorem 1(ii). We note that it is not a direct consequence of Proposition 11 because \({\tilde{H}}_0 (0; \textbf{e}) = 0\) clearly means the nonhyperbolicity of the stationary solution \((\phi , \psi ) = (0, \pi /4)\) in (42) and (43). To determine the stability of the oscillatory solution, we linearize (42) around \((0, \pi /4)\) and express the linearized equation as \(\Theta ' = L (t) \Theta \) for \(\Theta = (\Theta _1, \Theta _2) \in {{\mathbb {R}}}^2.\) Then L(t) is given by
where \({\tilde{\theta }} (t) = {\tilde{\theta }} (t; 0, \pi /4).\) We solve the linearized equation and substituting \(t = 2 \pi \) into the solution \(\Theta (t).\) Then \(\Theta _1 (2 \pi ) = Q \Theta _1 (0)\) for a coefficient Q. Since
Q is represented by
If \(\dfrac{{\partial }H_0}{{\partial }\varphi } (0; \textbf{e}) < 0,\) then Q is less than 1. It is easy to see that the solution \((\phi (t), \psi (t))\) of (42) near \((0, \pi /4)\) at \(t = 0\) approaches \((0, \psi _\infty )\) exponentially as \(t \rightarrow \infty \) for some \(\psi _\infty \) close to \(\pi /4,\) which implies the stability of the oscillatory solution. Similarly, if \(\dfrac{{\partial }H_0}{{\partial }\varphi } (0; \textbf{e}) > 0,\) the oscillatory solution is unstable.
Next, we prove Theorem 2. If a stationary solution \(\varphi \in (0, \pi /2)\) in the first equation of (12) exists, Proposition 11(iii) leads to the existence and the stability of a quasi-periodic solution in (4). In order to prove statement (ii), we apply Proposition 11(i). Assume \({\tilde{H}}_0 (\varphi ; \varepsilon ) > 0.\) Let \((\phi , \psi )\) be the periodic solution of (42) associated with \(\theta _\varepsilon \) and T be the period of \((\phi , \psi ).\) Note that T may depend on \(\varepsilon .\) We consider the function \(\omega = \omega (t)\) defined by \((\phi , \psi )\) from Lemma 8. Here we keep the identification (52) in mind and take \(t = t_1, t_2,\) and \(t_3\) appropriately as
Then we see \(\omega (T) - \omega (0) = \pi .\) It follows from Proposition 11(i) that \((\phi , \psi )\) is approximated by the solution \(({\bar{\phi }}, {\bar{\psi }})\) of (43). Then the solution \({\bar{\omega }}\) of the second equation in (12) is given by \(({\bar{\phi }}, {\bar{\psi }})\) due to Lemma 8 and explicitly expressed by \({\bar{\omega }} (t) = {\bar{\omega }} (0) + {\tilde{H}}_0 (\varphi ; \varepsilon ) t.\) Then we find \({\tilde{H}}_0 (\varphi ; \varepsilon ) T = \pi + O (\varepsilon ).\) Hence, for sufficiently large integer n, there exists \(\varepsilon _n\) such that \(T = 2 \pi n,\) which implies that the quasi-periodic solution \(\theta _\varepsilon \) becomes a periodic solution in (42). Similarly, we can choose \(\varepsilon _n'\) slightly different from \(\varepsilon _n\) as \(T \ne 2 \pi n,\) from which \(\theta _{\varepsilon _n'}\) is a real quasi-periodic solution. In the case that \({\tilde{H}}_0 (\varphi ; \varepsilon ) \) is negative, we prove (ii) in the same way as above.

Graph of \(H_0 (\varphi ; \textbf{e})\) for \(p = 2, q = -1, e_1 = -0.5043, e_2 = 1\)
Unfortunately, it is impossible to calculate the integrals (23) and (24) in many cases. Hence we cannot check whether specific parameters satisfy the assumptions in Theorem 1(ii) and Theorem 2 analytically. Then we evaluate those integrals by a computer-aided analysis with Mathematica. In Fig. 2, we illustrate the graphs of \(H_0 (\varphi ; \textbf{e})\) and \({\tilde{H}}_0 (\varphi ; \textbf{e})\) in \(0 \le \varphi \le \pi /2\) for different three \(e_1.\) Let us remember the symmetries of those functions stated in Lemma 13. As shown in the figure, the derivative of \(H_0 (\varphi ; \textbf{e})\) at \(\varphi = 0, \pi /2\) does not correspond to 0. In the case of \(e_1 = - 0.79,\) there is the zero of \(H_0 (\varphi ; \textbf{e})\) at some \(\varphi \in (0, \pi /2)\) satisfying all assumptions in Theorem 2. On the other hand, \(H_0 (\varphi ; \textbf{e})\) is positive for \(e_1 = -0.81\) and negative for \(e_1 = -0.77\) in all \(\varphi \in (0, \pi /2),\) related to the nonexistence of quasi-periodic solutions. Finally, we point out the possibility of the multiple stationary solutions in \(\varphi \in (0, \pi /2)\) shown in Fig. 3. This also indicates the existence of a stationary solution with the degenerate condition \(\dfrac{{\partial }H_0}{{\partial }\varphi } = 0\) by slightly changing the parameters.
Data availability
No data was used for the research described in the article.
Code availability
Not applicable.
References
Vicsek, T., Zafeiris, A.: Collective motion. Phys. Rep. 517(3), 71–140 (2012). https://doi.org/10.1016/j.physrep.2012.03.004
Bechinger, C., Di Leonardo, R., Löwen, H., Reichhardt, C., Volpe, G., Volpe, G.: Active particles in complex and crowded environments. Rev. Mod. Phys. 88, 045006 (2016). https://doi.org/10.1103/RevModPhys.88.045006
Ohta, T., Ohkuma, T.: Deformable self-propelled particles. Phys. Rev. Lett. 102, 154101 (2009). https://doi.org/10.1103/PhysRevLett.102.154101
Howse, J.R., Jones, R.A.L., Ryan, A.J., Gough, T., Vafabakhsh, R., Golestanian, R.: Self-motile colloidal particles: from directed propulsion to random walk. Phys. Rev. Lett. 99, 048102 (2007). https://doi.org/10.1103/PhysRevLett.99.048102
Jiang, H.-R., Yoshinaga, N., Sano, M.: Active motion of a Janus particle by self-thermophoresis in a defocused laser beam. Phys. Rev. Lett. 105, 268302 (2010). https://doi.org/10.1103/PhysRevLett.105.268302
Kohira, M., Hayashima, Y., Nagayama, M., Nakata, S.: Synchronized self-motion of two camphor boats. Langmuir 17, 7124–7129 (2001). https://doi.org/10.1021/la010388r
Nakata, S., Nagayama, M., Kitahata, H., Suematsu, N.J., Hasegawa, T.: Physicochemical design and analysis of self-propelled objects that are characteristically sensitive to environments. Phys. Chem. Chem. Phys. 17, 10326–10338 (2015). https://doi.org/10.1039/C5CP00541H
Nakata, S., Pimienta, V., Lagzi, I., Kitahata, H., Suematsu, N.J. (eds.): Self-Organized Motion. Theoretical and Computational Chemistry Series. The Royal Society of Chemistry, London (2019). https://doi.org/10.1039/9781788013499
Izri, Z., van der Linden, M.N., Michelin, S., Dauchot, O.: Self-propulsion of pure water droplets by spontaneous Marangoni-stress-driven motion. Phys. Rev. Lett. 113, 248302 (2014). https://doi.org/10.1103/PhysRevLett.113.248302
Yoshinaga, N., Nagai, K.H., Sumino, Y., Kitahata, H.: Drift instability in the motion of a fluid droplet with a chemically reactive surface driven by Marangoni flow. Phys. Rev. E 86, 016108 (2012). https://doi.org/10.1103/PhysRevE.86.016108
Hayashima, Y., Nagayama, M., Nakata, S.: A camphor grain oscillates while breaking symmetry. J. Phys. Chem. B 105(22), 5353–5357 (2001)
Brückner, D., Fink, A., Schreiber, C., Röttgermann, P., Rädler, J., Broedersz, C.: Stochastic nonlinear dynamics of confined cell migration in two-state systems. Nat. Phys. (2019). https://doi.org/10.1038/s41567-019-0445-4
Schreiber, C., Segerer, F., Wagner, E., Roidl, A., Rädler, J.: Ring-shaped microlanes and chemical barriers as a platform for probing single-cell migration. Sci. Rep. 6, 26858 (2016). https://doi.org/10.1038/srep26858
Bánsági, T., Wrobel-Szypula, M., Scott, S., Taylor, A.: Motion and interaction of aspirin crystals at aqueous–air interfaces. J. Phys. Chem. B (2013). https://doi.org/10.1021/jp405364c
Koyano, Y., Suematsu, N.J., Kitahata, H.: Rotational motion of a camphor disk in a circular region. Phys. Rev. E 99, 022211 (2019). https://doi.org/10.1103/PhysRevE.99.022211
Nakata, S., Yamamoto, H., Koyano, Y., Yamanaka, O., Sumino, Y., Suematsu, N., Kitahata, H., Skrobanska, P., Gorecki, J.: Selection of rotation direction for a camphor disk resulting from a chiral asymmetry of a water chamber. J. Phys. Chem. B 120, 9166–9172 (2016). https://doi.org/10.1021/acs.jpcb.6b05427
Tanaka, S., Sogabe, Y., Nakata, S.: Spontaneous change in trajectory patterns of a self-propelled oil droplet at the air-surfactant solution interface. Phys. Rev. E 91, 032406 (2015). https://doi.org/10.1103/PhysRevE.91.032406
Mikhailov, A.S., Calenbuhr, V.: From Cells to Societies: Models of Complex Coherent Action. Springer, Heidelberg (2002)
Gorecki, J., Kitahata, H., Suematsu, N.J., Koyano, Y., Skrobanska, P., Gryciuk, M., Malecki, M., Tanabe, T., Yamamoto, H., Nakata, S.: Unidirectional motion of a camphor disk on water forced by interactions between surface camphor concentration and dynamically changing boundaries. Phys. Chem. Chem. Phys. 19, 18767–18772 (2017)
Takabatake, F., Yoshikawa, K., Ichikawa, M.: Communication: mode bifurcation of droplet motion under stationary laser irradiation. J. Chem. Phys. 141(5), 051103 (2014)
Chakrabarti, A., Choi, G.P.T., Mahadevan, L.: Self-excited motions of volatile drops on swellable sheets. Phys. Rev. Lett. 124, 258002 (2020)
Sumino, Y., Yoshikawa, K.: Self-motion of an oil droplet: a simple physicochemical model of active Brownian motion. Chaos: Interdiscip. J. Nonlinear Sci. 18(2), 026106 (2008). https://doi.org/10.1063/1.2943646
Schweitzer, F., Ebeling, W., Tilch, B.: Complex motion of Brownian particles with energy depots. Phys. Rev. Lett. 80, 5044–5047 (1998). https://doi.org/10.1103/PhysRevLett.80.5044
Koyano, Y., Yoshinaga, N., Kitahata, H.: General criteria for determining rotation or oscillation in a two-dimensional axisymmetric system. J. Chem. Phys. 143(1), 014117 (2015). https://doi.org/10.1063/1.4923421
Guckenheimer, J., Holmes, P.: Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields, vol. 42. Springer, New York (2013)
Li, X.: On the persistence of quasi-periodic invariant tori for double Hopf bifurcation of vector fields. J. Differ. Equ. 260(10), 7320–7357 (2016)
Kuznetsov, Y.A., Kuznetsov, I.A., Kuznetsov, Y.: Elements of Applied Bifurcation Theory, vol. 112. Springer, New York (1998)
Wiggins, S.: Normally Hyperbolic Invariant Manifolds in Dynamical Systems, vol. 105. Springer, New York (1994)
Hale, J.: Ordinary Differential Equations. Pure and Applied Mathematics, vol. XXI. Wiley-Interscience, New York (1969)
Kocarev, L., Parlitz, U.: Generalized synchronization, predictability, and equivalence of unidirectionally coupled dynamical systems. Phys. Rev. Lett. 76(11), 1816 (1996)
Golubitsky, M., Stewart, I., Schaeffer, D.G.: Singularities and Groups in Bifurcation Theory: Volume II, vol. 69. Springer, New York (2012)
Golubitsky, M., Roberts, M.: A classification of degenerate Hopf bifurcations with \({\rm O}(2)\) symmetry. J. Differ. Equ. 69(2), 216–264 (1987)
Armbruster, D., Guckenheimer, J., Holmes, P.: Heteroclinic cycles and modulated travelling waves in systems with \({\rm O}(2)\) symmetry. Phys. D: Nonlinear Phenom. 29(3), 257–282 (1988)
Murza, A.C., Yu, P.: Coupled oscillatory systems with \({\mathbb{D}}_4\) symmetry and application to van der Pol oscillators. Int. J. Bifurc. Chaos 26(08), 1650141 (2016)
Yagasaki, K., Wagenknecht, T.: Detection of symmetric homoclinic orbits to saddle-centres in reversible systems. Phys. D: Nonlinear Phenom. 214(2), 169–181 (2006)
Barron, M.A.: Stability of a ring of coupled van der Pol oscillators with non-uniform distribution of the coupling parameter. J. Appl. Res. Technol. 14(1), 62–66 (2016)
Rand, R., Holmes, P.: Bifurcation of periodic motions in two weakly coupled van der Pol oscillators. Int. J. Non-Linear Mech. 15(4–5), 387–399 (1980)
Storti, D., Rand, R.: Dynamics of two strongly coupled van der Pol oscillators. Int. J. Non-Linear Mech. 17(3), 143–152 (1982)
Storti, D., Rand, R.: Dynamics of two strongly coupled relaxation oscillators. SIAM J. Appl. Math. 46(1), 56–67 (1986)
Woafo, P., Chedjou, J., Fotsin, H.: Dynamics of a system consisting of a van der Pol oscillator coupled to a Duffing oscillator. Phys. Rev. E 54(6), 5929 (1996)
Bi, Q.: Dynamical analysis of two coupled parametrically excited van der Pol oscillators. Int. J. Non-Linear Mech. 39(1), 33–54 (2004)
Gilsinn, D.: Constructing invariant tori for two weakly coupled van der Pol oscillators. Nonlinear Dyn. 4(3), 289–308 (1993)
Ngouonkadi, E.M., Nono, M.K., Fotsin, H., Sone, M.E., Yemele, D.: Hopf and quasi-periodic Hopf bifurcations and deterministic coherence in coupled Duffing–Holmes and van der Pol oscillators: the Arnol’d resonance web. Phys. Scr. 97(6), 065202 (2022)
Keith, W., Rand, R.: Dynamics of a system exhibiting the global bifurcation of a limit cycle at infinity. Int. J. Non-linear Mech. 20(4), 325–338 (1985)
Ekeland, I.: A perturbation theory near convex Hamiltonian systems. J. Differ. Equ. 50(3), 407–440 (1983)
Rabinowitz, P.H.: Periodic solutions of Hamiltonian systems: a survey. SIAM J. Math. Anal. 13(3), 343–352 (1982)
Yagasaki, K.: Bifurcations from one-parameter families of symmetric periodic orbits in reversible systems. Nonlinearity 26(5), 1345 (2013)
Wolfram Research, Inc.: Mathematica, Version 13.0.0. Champaign, IL (2021). https://www.wolfram.com/mathematica. Accessed 3 Mar 2023
Vitolo, R., Broer, H., Simó, C.: Quasi-periodic bifurcations of invariant circles in low-dimensional dissipative dynamical systems. Regul. Chaotic Dyn. 16(1), 154–184 (2011)
Acknowledgements
The authors would like to thank Tomoyuki Miyaji (Kyoto University, Japan) and Natsuhiko Yoshinaga (Tohoku University, Japan) for stimulating discussions. We would like to thank Editage (http://www.editage.jp) for English language editing. Kota Ikeda was supported by the JSPS KAKENHI Grant Number 20K03757. Hiroyuki Kitahata was supported by the JSPS KAKENHI Grant Number 21H01004. Yuki Koyano was supported by the JSPS KAKENHI Grant Number 20K14370.
Funding
Open Access funding provided by Meiji University.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interest.
Ethics approval
Not applicable.
Consent to participate
Not applicable.
Consent for publication
The authors agree to publish this work.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
This article is published under an open access license. Please check the 'Copyright Information' section either on this page or in the PDF for details of this license and what re-use is permitted. If your intended use exceeds what is permitted by the license or if you are unable to locate the licence and re-use information, please contact the Rights and Permissions team.
About this article

Cite this article
Ikeda, K., Kitahata, H. & Koyano, Y. Existence and stability of a quasi-periodic two-dimensional motion of a self-propelled particle. Japan J. Indust. Appl. Math. 41, 1413–1449 (2024). https://doi.org/10.1007/s13160-024-00661-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13160-024-00661-7