

Abstract
Object vision is commonly thought to involve a hierarchy of brain regions processing increasingly complex image features, with high-level visual cortex supporting object recognition and categorization. However, object vision supports diverse behavioural goals, suggesting basic limitations of this category-centric framework. To address these limitations, we mapped a series of dimensions derived from a large-scale analysis of human similarity judgements directly onto the brain. Our results reveal broadly distributed representations of behaviourally relevant information, demonstrating selectivity to a wide variety of novel dimensions while capturing known selectivities for visual features and categories. Behaviour-derived dimensions were superior to categories at predicting brain responses, yielding mixed selectivity in much of visual cortex and sparse selectivity in category-selective clusters. This framework reconciles seemingly disparate findings regarding regional specialization, explaining category selectivity as a special case of sparse response profiles among representational dimensions, suggesting a more expansive view on visual processing in the human brain.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Main
A central goal of visual neuroscience is to understand how the brain encodes and represents rich information about objects, allowing us to make sense of our visual world and act on it in meaningful ways. A widely studied and influential account posits that one central function of the visual system is to recognize objects by organizing them into distinct categories1,2,3,4. According to this view, early visual cortex serves to analyse incoming visual information by representing basic visual features5, which are then combined into more and more complex feature combinations, until higher-level visual regions in the occipitotemporal cortex and beyond support the recognition of object identity and category3. In line with this view, a number of category-selective clusters have been identified in occipitotemporal cortex that respond selectively to specific object classes such as faces, scenes, body parts, tools or text6,7,8,9,10,11. The functional importance of these regions is underscored by studies demonstrating that object category and identity as well as performance in some behavioural tasks can be read out from activity in occipitotemporal cortex12,13,14,15,16,17 and that lesions to these regions can lead to selective deficits in object recognition abilities18,19,20,21,22.
Despite the importance of object categorization and identification as crucial goals of object vision, it has been argued that these functions alone are insufficient for capturing how our visual system allows us to make sense of the objects around us23. A more comprehensive understanding of object vision should account for the rich meaning and behavioural relevance associated with individual objects beyond discrete labels. This requires incorporating the many visual and semantic properties of objects that underlie our ability to make sense of our visual environment, perform adaptive behaviours and communicate about our visual world23,24,25,26,27. Indeed, others have proposed that visual cortex is organized on the basis of continuous dimensions reflecting more general object properties, such as animacy28,29,30,31, real-world size29,32, aspect ratio31,33 or semantics34. These and other continuous dimensions reflect behaviourally relevant information that offers a more fine-grained account of object representations than discrete categorization and recognition alone. This dimensional view suggests a framework in which visual cortex is organized on the basis of topographic tuning to specific dimensions that extends beyond category-selective clusters. Under this framework, category-selective clusters may emerge from a more general organizing principle34,35,36,37,38, reflecting cortical locations where these tuning maps encode feature combinations tied to specific object categories34,38,39. Yet, while previously proposed dimensions have been shown to partially reflect activity patterns in category-selective clusters40,41,42,43,44,45, they cannot account fully for the response profile and are largely inferior to category selectivity in explaining the functional selectivity of human visual cortex for objects46,47.
To move beyond the characterization of individual behavioural goals underlying both the discrete category-centric and the continuous dimensional views and to comprehensively map a broad spectrum of behaviourally relevant representations, one powerful approach is to link object responses in visual cortex to judgements about the perceived similarity between objects48,49,50,51. Indeed, perceived similarity serves as a common proxy of mental object representations underlying various behavioural goals, as the similarity relation between objects conveys much of the object knowledge and behavioural relevance across diverse perceptual and conceptual criteria52,53,54,55,56. Perceived similarity is therefore ideally suited for revealing behaviourally relevant representational dimensions and how these dimensions are reflected in cortical patterns of brain activity.
To uncover the nature of behaviourally relevant selectivity underlying similarity judgements in human visual cortex, in the present study we paired functional MRI (fMRI) responses to thousands of object images57 with core representational dimensions derived from a dataset of millions of human similarity judgements. In contrast to much previous research that has focused on a small number of hypothesis-driven dimensions or that used small, selective image sets29,48,49,50,51,58,59,60, we carried out a comprehensive characterization of cortical selectivity in response to 66 representational dimensions identified in a data-driven fashion for 1,854 objects52,61.
Moving beyond the view that mental object representations derived from similarity judgements are primarily mirrored in high-level visual cortex48,49,50,57, we demonstrate that representations underlying core object dimensions are reflected throughout the entire visual cortex. Our results reveal that cortical tuning to these dimensions captures the functional topography of visual cortex and mirrors stimulus selectivity throughout the visual hierarchy. In this multidimensional representation, category selectivity stands out as a special case of sparse selectivity to a set of core representational object dimensions, while other parts of visual cortex reflect a more mixed selectivity. A direct model comparison revealed that continuous object dimensions provide a better model of brain responses than categories across the visual system, suggesting that dimension-related tuning maps offer more explanatory power than a category-centric framework. Together, our findings reveal the importance of behaviour-derived object dimensions for understanding the functional organization of the visual system and offer a broader, comprehensive view of object representations that bridges the gap between regional specialization and domain-general topography.
Results
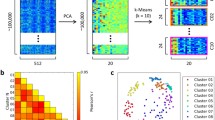
We first aimed at mapping core representational object dimensions to patterns of brain activity associated with visually perceived objects. To model the neural representation of objects while accounting for their large visual and semantic variability62,63, we used the THINGS-data collection57, which includes densely sampled fMRI data for thousands of naturalistic object images from 720 semantically diverse objects, as well as 4.7 million behavioural similarity judgements of these objects (Fig. 1).

We linked core representational dimensions capturing the behavioural relevance of objects to spatially resolved neural responses to thousands of object images. For this, we used the THINGS-data collection57, which includes fMRI and behavioural responses to objects from the THINGS object concept and image database82. The behavioural data were used to train a computational model of core object dimensions underlying human similarity judgements on different object concepts. We extended this embedding to the level of individual object images on the basis of the computer vision model CLIP-ViT64. The fMRI data comprise three participants who each saw 8,740 unique object images. We used an encoding model of the object dimension embedding to predict fMRI responses to each image in each voxel. The estimated encoding model weights reflect the tuning of each voxel to each object dimension. X, B and Y denote the design matrix, regression weights and outcome of the encoding model, respectively.
As core object dimensions, we used a recent similarity embedding of behaviour-derived object dimensions, which underlie the perceived similarity of 1,854 object concepts52,57. In this embedding, each object image is characterized by 66 dimensions derived from the human similarity judgements in an odd-one-out task. We chose this embedding for several reasons. First, it provides highly reproducible dimensions that together are sufficient for capturing single-trial object similarity judgements close to the noise ceiling. Second, the use of an odd-one-out task supports the identification of the minimal information required to distinguish between different objects and thus is sensitive not only to conceptual information, such as high-level category (for example, ‘is an animal’), but also to key visual–perceptual distinctions (for example, ‘is round’). The object dimensions thus capture behaviourally relevant information, in that they support the key factors underlying arbitrary categorization behaviour and therefore underlie our ability to make sense of our visual world, to generalize, to structure our environment and to communicate our knowledge. Indeed, the object dimensions capture external behaviour such as high-level categorization and typicality judgements, underscoring their potential explanatory value as a model of neural responses to objects52. Third, the object dimensions are easily interpretable, thus simplifying the interpretation of neural activity patterns in relation to individual dimensions.
The fMRI dataset covers 8,740 unique images from 720 categories presented to three participants (two female) over the course of 12 sessions57. Given that the behavioural similarity embedding was trained only on one image for each of the 1,854 THINGS categories, these dimensions may only partially capture the visual richness of the entire image set, which may affect the potential for predicting image-wise brain responses. To address this challenge, we fine-tuned the artificial neural network model CLIP-ViT64 to directly predict object dimensions for the 8,740 images in our fMRI dataset. This model has previously been shown to provide a good correspondence to behavioural65,66 and brain data67,68, indicating its potential for providing accurate image-wise estimates of behaviour-derived object dimensions. Indeed, this prediction approach led to highly accurate cross-validated predictions of object similarity69 and consistent improvements in blood-oxygen-level-dependent (BOLD) signal predictions for all 66 dimensions (Supplementary Fig. 1).
Core object dimensions are reflected in widespread fMRI activity patterns throughout the human visual system
To test how these dimensions were expressed in voxel-wise brain responses, we fit an fMRI encoding model that predicts spatially resolved brain responses on the basis of a weighted sum of these object dimensions. This allowed us to map out the contribution of the dimensions to the measured signal and thus link interpretable behaviour-derived dimensions to patterns of brain activity.
Across all 66 object dimensions, our results revealed a widely distributed cortical representation of these dimensions that spans much of visual cortex and beyond (Fig. 2). The spatial extent of these effects was highly similar across all three participants, underscoring the generality of these findings. We also tested the replicability of these results on an independent fMRI dataset70, revealing a similarly extensive representation of the object dimensions (Supplementary Fig. 2). Please note that, in the following, we use the terms ‘widespread’ and ‘distributed’ interchangeably and do not refer to a distributed representational coding scheme or the presence of continuous gradients but rather to responses that are not locally confined.

a, Prediction accuracy for one example participant (P1) visualized on a cortical flat map (centre) and inflated views of the cortical surface (corners). b, Results for the other two participants visualized on cortical flat maps. The colours indicate the proportion of explained variance (noise-ceiling-corrected R2) of held-out data in a 12-fold between-session cross-validation. The white outlines indicate regions of interest defined in separate localizer experiments: FFA, OFA, posterior superior temporal sulcus (pSTS), EBA, PPA, OPA, MPA and V1–V3.
Prediction accuracies not only peaked in lateral occipital and posterior ventral temporal regions but also reached significant values in early visual, dorsal visual and frontal regions (Supplementary Fig. 3). In contrast to previous work based on representational similarity analysis that found information about perceived similarity to be confined primarily to higher-level visual cortex49,50,51,57, our dimension-based approach revealed that behaviourally relevant information about objects is much more distributed throughout the visual processing hierarchy, including the earliest cortical processing stages.
Behaviour-derived object dimensions reflect the functional topography of the human visual system
Having identified where information about perceived similarity is encoded, we next explored the spatial layout of each individual dimension underlying this representation. By using a voxel-encoding model of interpretable object dimensions, it is possible to inspect the cortical distribution of the weights of each regressor separately and interpret them in a meaningful fashion. This has two benefits. First, it allows us to probe to what degree behaviour-derived dimensions alone can capture the known topography of visual cortex. Second, it allows us to identify novel topographic patterns across visual cortex. This provides important insights into how the topography of visual cortex reflects object information relevant to behaviour and how functionally specialized regions are situated in this cortical landscape.
Visualizing the voxel-wise regression weights for each object dimension on the cortical surface (Fig. 3) revealed a clear correspondence between numerous dimensions and characteristic, known topographic patterns of the visual system. For example, the ‘animal-related’ dimension mirrors the well-established spoke-like tuning gradient for animate versus inanimate objects29, while dimensions such as ‘head-related’ and ‘body-part-related’ differentiate the regional selectivity for faces and body parts in the fusiform face area (FFA), occipital face area (OFA) and extrastriate body area (EBA)6,7,71. Likewise, the implicit inclusion of natural scenes as object backgrounds revealed scene-content-related dimensions (for example, ‘house/furnishing-related’, ‘transportation/movement-related’ and ‘outdoors’), which were found to be associated with scene-selective brain regions such as parahippocampal place area (PPA), medial place area (MPA) and occipital place area (OPA)8,72,73,74,75,76. Our approach also independently identified a ‘food-related’ dimension in areas adjacent to the fusiform gyrus, in line with recently reported clusters responding selectively to food stimuli77,78,79. A dimension related to tools (‘tool-related/handheld/elongated’) also matched expected activation patterns in middle temporal gyrus11,80,81. Furthermore, dimensions related to low- to mid-level visual features (for example, ‘grid/grating-related’ and ‘repetitive/spiky’) reflected responses primarily in early visual cortex.

Example maps for 12 of the 66 dimensions for participant P1. Each panel shows the encoding model weights for one object dimension projected onto the flattened cortical surface. The numbers in the panel labels show the dimension number in the embedding.
Beyond these established topographies, the results also revealed numerous additional topographic patterns. For example, one dimension reflected small, non-mammalian animals (‘bug-related/non-mammalian/disgusting’) that was clearly distinct from the ‘animal-related’ dimension by lacking responses in face and body selective regions. Another dimension reflected a widely distributed pattern in response to thin, flat objects (‘thin/flat/wrapping’). Our approach thus allowed for the identification of candidate functional selectivities in visual cortex that might have gone undetected with more traditional approaches based on proposed categories or features47,77. Importantly, the functional topographies of most object dimensions were also found to be highly consistent across the three participants in this dataset (Supplementary Fig. 4) and largely similar to participants in an independent, external dataset (Supplementary Fig. 2), suggesting that these topographies may reflect general organizing principles rather than idiosyncratic effects (Supplementary Fig. 4 and Extended Data Figs. 1–6).
Together, our results uncover cortical maps of object dimensions underlying the perceived similarity between objects. These maps span extensive portions of the visual cortex, capturing topographic characteristics such as tuning gradients of object animacy, lower-level visual feature tuning in early visual cortex and category-selective, higher-level regions while uncovering new candidate selectivities. These findings thus support an organizing principle where multiple, superimposing cortical tuning maps for core object properties collectively represent behaviourally relevant information about objects.
Cortical tuning to behaviour-derived object dimensions explains regional functional selectivity
Having delineated the multidimensional topographic maps across visual cortex, we next homed in on individual brain regions to determine their functional selectivity as defined by their response tuning across these behaviour-derived dimensions. To this end, we developed a high-throughput method to identify object images representative for specific brain regions. Specifically, we first determined a functional tuning profile across dimensions for each region of interest based on the region’s mean encoding model weights. Next, we identified images whose behavioural dimension profile best matched the functional tuning profile of the brain region. To this end, we used all 26,107 object images in the THINGS database82, most of which were unseen by participants, and assessed the cosine similarity between the dimension profiles of brain regions and images. This enabled us to rank over 26,000 images on the basis of their similarity to a given brain region’s functional tuning profile.
Despite having been fitted solely on the 66-dimensional similarity embedding, our approach successfully identified diverse functional selectivities of visual brain regions (Fig. 4). For instance, the most representative images for early visual regions (primary to tertiary visual cortex, V1–V3) contained fine-scale, colourful and repeating visual features, consistent with known representations of oriented edges and colour in these areas83,84. These patterns appeared more fine-grained in earlier (V1 or V2) than in later retinotopic regions (human V4, hV4), potentially reflecting increased receptive field size along the retinotopic hierarchy85,86,87. A similar finding is reflected in dimension selectivity profiles (Fig. 4), revealing higher colour selectivity in hV4 than in early retinotopic regions V1–V3 while yielding reductions in the ‘repetitive/spiky’ dimension. Notably, tuning profiles in category-selective regions aligned with images of expected object categories: faces in face-selective regions (FFA and OFA), body parts in body-part-selective regions (EBA) and scenes in scene-selective regions (PPA, OPA and MPA). Closer inspection of the tuning profiles revealed differences between regions that respond to the same basic object category, such as a stronger response to the ‘body-part-related’ dimension in OPA but not in other place-selective regions. Also, selectivity to faces (FFA and OFA) versus body parts (EBA) appeared to be driven by the response magnitude to the ‘head-related’ dimension, while tuning to the remaining dimensions was highly similar across these regions. Together, these findings demonstrate that the 66 object dimensions derived from behaviour capture the selectivity across the visual processing hierarchy, highlighting the explanatory power of the dimensional framework for characterizing the functional architecture of the visual system.

The rose plots indicate the magnitude of tuning for each object dimension in a given visual brain region. The image panels show eight images with the most similar model representation to the regional tuning profile. For copyright reasons, all original images have been replaced with visually similar images, and images of minors for which no permission could be obtained have been replaced with images of adults (marked with asterisks). The original images are available upon request. Photos from Pixabay.com and Pexels.com.
Category-selective brain regions are sparsely tuned to behaviour-derived object dimensions
Given that dimensional tuning profiles effectively captured the selectivity of diverse visual regions, we asked what factors distinguish category-selective visual brain regions from non-category-selective regions in this dimensional framework. We reasoned that category selectivity reflects a sparsely tuned representation, where activity in category-selective regions is driven by only a few dimensions, while non-category-selective regions reflect a more mixed selectivity, with activity related to a larger number of dimensions. In this way, functionally specialized, category-selective regions might stand out as an extreme case of multidimensional tuning. As a consequence, this would also make it easier to identify category-selective regions due to their sparser selectivity.
To quantify this, we estimated a measure of sparseness over the encoding model weights in each voxel. Large sparseness indicates regions that are selective to very few dimensions, while lower sparseness indicates a dense representation in regions that respond broadly to diverse dimensions. Our results (Fig. 5a) indeed revealed sparser tuning in category-selective regions than in other parts of the visual system. This effect was most pronounced in face- and body-part-selective regions (FFA, OFA and EBA), with the sparsest tuning across all participants. The face-selective posterior superior temporal sulcus exhibited particularly sparse representation in Participants 1 and 2, while this region was not present in Participant 3 and, as expected, yielded no increase in sparseness. Scene-selective regions (PPA, MPA and OPA) also exhibited sparseness, though the effects were more variable across participants, which could arise from the representational dimensions being derived from objects within scenes, as opposed to isolated scene images without a focus on individual objects. Conversely, non-category-selective regions, such as early visual cortices, clearly exhibited dense representations. These findings suggest that category-selective regions, while responsive to multiple dimensions, may primarily respond to a small subset of behaviourally relevant dimensions. Thus, in a multidimensional representational framework, category selectivity may reflect a special case of sparse tuning within a broader set of distributed dimension tuning maps.

a, Inflated cortical surfaces for Participant 1 showing the sparseness over the encoding model weights in each voxel. The colours indicate z values of sparseness compared with a noise pool of voxels thresholded at P < 0.05 (one-sided, uncorrected). b, Ventral view of the right hemisphere for all three participants. The round outlines illustrate the locations of two explorative, sparsely tuned regions of interest: one in the fusiform gyrus and one in orbitofrontal cortex. c, Functional selectivity of these explorative regions of interest demonstrated by their multidimensional tuning profiles and most representative object images. For copyright reasons, all original images have been replaced with visually similar images. The original images are available upon request. Photos from Pixabay.com and Pexels.com.
Beyond the increased sparseness in functionally selective clusters, which had been defined in an independent localizer experiment57, we explored to what degree we could use sparseness maps for revealing additional, potentially novel functionally selective regions. To this end, we identified two clusters with consistently high sparseness values across participants (Fig. 5b). One cluster was located in the right hemisphere anterior to anatomically defined area FG4 (ref. 88) and between the functionally defined FFA and anterior temporal face patch89, with no preferential response to human faces in two of three participants in a separate functional localizer. The other cluster was located in orbitofrontal cortex, coinciding with anatomically defined area Fo3 between the olfactory and medial orbital sulci90. Having identified these clusters, we extracted regional tuning profiles and determined the most representative object images for each cluster. Inspection of the tuning profiles in these sparsely tuned regions revealed that their responses were best captured by images of animal faces for the region anterior to FFA and sweet food for orbitofrontal cortex (Fig. 5c). While the results in orbitofrontal cortex are in line with the motivational importance of rewarding foods and food representations in frontal regions78,91,92,93,94, the selective response to animal faces in the cluster anterior to FFA deserves further study. By identifying regional response selectivity in a data-driven fashion95, the results show that sparse tuning can aid in localizing functionally selective brain regions, corroborating the link between representational dimensions and regional selectivity.
Object dimensions offer a better account of visual cortex responses than categories
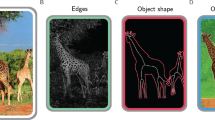
If representational dimensions offer a better account of the function of ventral visual cortex than categorization, this would predict that they have superior explanatory power for brain responses to visually perceived objects in these regions47,96. To compare these accounts formally, we compiled a multidimensional and a categorical model of object responses and compared the amount of shared and unique variance explained by these models (for an exploratory comparison with object shape, see Supplementary Fig. 6 and Supplementary Methods 2). We first constructed a category model by assigning all objects appearing in the presented images into 50 common high-level categories (for example, ‘animal’, ‘bird’, ‘body part’, ‘clothing’, ‘food’, ‘fruit’ and ‘vehicle’) available as part of the THINGS metadata97. To account for the known selectivity to faces and body parts, we additionally labelled images in which faces or body parts appeared and included them as two additional categories. Then, for each category, we determined the most diagnostic object dimension. Since some dimensions mapped to multiple categories, this resulted in a model of 30 object dimensions. On the basis of the 52 categories and the 30 dimensions, we fit two encoding models to the fMRI single-trial responses and performed variance partitioning to disentangle the relative contributions of the object category and dimension models to the cross-validated prediction.
The results (Fig. 6) demonstrate that both object dimensions and categories shared a large degree of variance in explaining brain responses, especially in higher-level ventro-temporal and lateral occipital cortices (median, 19%; maximum, 74% shared explained variance) and to a lesser extent in early visual regions (median, 4%; maximum, 19% shared explained variance). This suggests that both models are well suited for predicting responses in the visual system. However, when we inspected the unique variance explained by either model, object dimensions explained a much larger amount of additional variance than object categories (Supplementary Fig. 5). This gain in explained variance was not only evident in higher-level regions (median, 10%; maximum, 35% unique explained variance), where both models performed well, but extended across large parts of visual cortex, including early visual regions (median, 8%; maximum, 35% unique explained variance), suggesting that behaviour-derived dimensions captured information not accounted for by categories. Conversely, category membership added little unique explained variance throughout the visual system (median, 1 %; maximum, 11%), reaching larger values in higher-level regions (median, 2%; maximum, 11% unique explained variance). Together, these results indicate that a multidimensional model offers an account with more explanatory value than a category model, supporting the idea that capturing behaviourally relevant responses in the visual system requires moving beyond categorization and suggesting object dimensions as a suitable model of encoding the behavioural relevance of objects.

a, Shared variance in single-trial fMRI responses explained by both models. b, Variance explained uniquely by a multidimensional model. c, Variance explained uniquely by a model of object categories. The flat maps show the left hemisphere of each participant. The colours indicate the proportion of explained variance (noise-ceiling-corrected R2) from variance partitioning.
Discussion
Determining how the human brain represents object properties that inform our broad range of behaviours is crucial for understanding how we make sense of our visual world and act on it in meaningful ways. Here we identified behaviour-derived brain representations by predicting fMRI responses to thousands of object images with 66 interpretable representational dimensions underlying millions of object similarity judgements. The results reveal that this behaviourally relevant information is mirrored in activity patterns throughout the entire visual processing hierarchy, emphasizing the importance of considering the entire system for identifying the behavioural relevance of visual responses. The diverse image selectivity of different visual brain regions emerged from the multidimensional tuning profiles in this distributed representation. This suggests that behaviour-derived dimensions offer a broadly applicable model for understanding the architecture of the visual system in which category-selective regions stand out as a special case of sparse tuning. A direct model comparison confirmed that such a multidimensional account has more explanatory value than a category-centric account.
Much work on the behavioural relevance of object responses in occipitotemporal cortex has focused primarily on a limited number of behavioural goals, such as recognition and high-level categorization20,21,22,28,74,96. According to this view, high-level visual regions contain representations that abstract from factors non-essential for recognition and categorization, such as position, colour or texture3,98,99. Our findings provide an alternative perspective on the nature of cortical object representations that may offer greater explanatory power than this traditional view. By considering a richer representation of objects supporting broader behavioural goals23, object information is no longer restricted to the commonalities between objects based on how we label them. In this framework, even responses in early visual cortex to images from high-level categories such as food77,78, which would traditionally be disregarded as lower-level confounds based on texture or colour, are relevant information supporting the processing of behaviourally relevant visual inputs. In this perspective, object vision solves the more general problem of providing a rich representation of the visual environment capable of informing a diverse array of behavioural domains23.
While our results favour a distributed view of object representations, localized response selectivity for ecologically important object stimuli has been replicated consistently, underscoring the functional importance of specialized clusters. Regional specialization and distributed representations have traditionally been seen as opposing levels of description37,38. In contrast, our study advances a framework for unifying these perspectives by demonstrating that, compared with other visual regions, category-selective clusters exhibit sparse response tuning profiles. This framework treats regional specialization not as an isolated phenomenon but rather as a special case within a more general organizing principle. It thus provides a more general view of object representations that acknowledges the importance of regional specialization in the broader context of a multidimensional topography.
One limitation of our study is that we did not identify behaviour-derived dimensions specific to each individual participant tested in the MRI. Instead, dimensions were based on a separate population of participants. However, our findings were highly replicable across the three participants for most dimensions, suggesting that these dimensions reflect general organizing principles rather than idiosyncratic effects (Supplementary Fig. 4). Of note, some dimensions did not replicate well (for example, ‘feminine (stereotypical)’, ‘hobby-related’ or ‘foot/walking-related’; Supplementary Fig. 4), which indicates that our fitting procedure does not yield replicable brain activity patterns for any arbitrary dimension. Future work may test the degree to which these results generalize to other dimensions identified through behaviour. Additionally, applying our approach to an external fMRI dataset (Supplementary Methods 1) revealed similarly distributed responses, with highly similar dimension tuning maps, suggesting that our findings generalize to independent participants (Supplementary Fig. 2). Future work could test the extent to which these results generalize to the broader population and how they vary between individuals. Furthermore, despite the broad diversity of objects used in the present study, our work excluded non-object images such as text82. While the effects of representational sparseness were less pronounced in scene-selective regions and largely absent in text-selective regions10, our encoding model significantly predicted brain responses in scene-selective regions (Supplementary Fig. 3), indicating validity beyond isolated objects. Future research may extend these insights by exploring additional image classes. Moreover, our use of a pre-trained computational model64 to obtain predicted dimension values might have underestimated the performance of the object embedding in predicting brain responses or may have selectively improved the fit of some dimensions more than that of others. Future studies could test whether using empirically measured dimension values for each image would lead to refined dimension maps. Finally, we reported results based on noise-ceiling-corrected R2 values. While noise-ceiling normalization is common practice when interpreting encoding model results to make them more comparable, the degree to which the results would generalize if noise ceilings were much higher could probably only be addressed with much larger yet similarly broad datasets.
While the behaviour-derived dimensions used in this study were highly predictive of perceived similarity judgements and object categorization52, there are many possible behaviours not captured by this approach. Here we used representational dimensions underlying similarity judgements to contrast with the category-centric approach. We chose similarity judgements as a common proxy for mental object representations, since they underlie various behavioural goals, including categorization and recognition52,53,54,55,56. Future work could test the extent to which other behaviours or computational approaches carry additional explanatory value15,49,51,100,101. This would also allow establishing the causal relevance of these activity patterns in behavioural readout13,15,17,102.
Given the explanatory power of our dimensional framework, our results may be interpreted as hinting at an alternative explanation of traditional stimulus-driven feature selectivity through the lens of behavioural relevance103, where the emergence of feature selectivity may exist because of the potential for efficient behavioural readout. Since the dimensions used in this study probably do not capture all behaviourally relevant selectivity, our approach does not allow testing this strong assumption. For example, a direct comparison of our embedding with the predictive performance of a Gabor wavelet pyramid model104 or state-of-the-art deep neural network models68 would neither support nor refute this idea. Future work could specifically target selectivity to individual visual features to determine the degree to which these representations are accessible to behavioural readout and thus may alternatively be explained in terms of behavioural relevance, rather than feature selectivity.
In conclusion, our work provides a multidimensional framework that aligns with the rich and diverse behavioural relevance of objects. This approach promises increased explanatory power relative to a category-centric framework and integrates regional specialization within a broader organizing principle, thus offering a promising perspective for understanding how we make sense of our visual world.
Methods
THINGS-data
We relied on the openly available THINGS-data collection to investigate the brain representation of everyday objects57. THINGS-data include 4.7 million human similarity judgements as well as neural responses measured with fMRI to thousands of naturalistic and broadly sampled object images. The collection also includes a representational embedding of core object dimensions learned from the similarity judgements, which predicts unseen human similarity judgements with high accuracy and offers an interpretable account of the mental representation of objects52,57. Here we used these object dimensions to predict fMRI responses to object images. All data generation and processing methods are described in detail in the original data publication57 and are only summarized here.
Participants
The MRI dataset in the THINGS-data collection comprises data from three healthy volunteers (two female, one male; mean age, 25.33 years). The participants had normal or corrected-to-normal visual acuity and were right-handed. The behavioural dataset in the THINGS-data collection was obtained from 12,340 participants through the crowdsourcing platform Amazon Mechanical Turk (6,619 female, 4,400 male, 56 other, 1,065 not reported; mean age, 36.71 years; s.d., 11.87 years; n = 5,170 no age reported). The participants provided informed consent in participation and data sharing, and they received financial compensation for taking part in the studies. Data acquisition of the THINGS-data collection was approved by the National Institutes of Health Institutional Review Board (study protocol 93 M-0170, NCT00001360).
Stimuli
All images were taken from the THINGS database82. The THINGS database contains 26,107 high-quality, coloured images of 1,854 object concepts from a wide range of nameable living and non-living objects, including non-countable substances (for example, ‘grass’), faces (for example, ‘baby’, ‘boy’ and ‘face’) and body parts (for example, ‘arm’, ‘leg’ and ‘shoulder’). The stimuli presented during fMRI included 720 object concepts from the THINGS database, with the first 12 examples of each concept selected for a total of 8,640 images. In addition, 100 of the remaining THINGS images were presented repeatedly in each session to estimate data reliability.
Experimental procedure
Participants in the THINGS-fMRI experiment took part in 15–16 scanning sessions, with the first 1–2 sessions serving to acquire individual functional localizers for retinotopic visual areas and category-selective clusters (faces, body parts, scenes, words and objects). The main fMRI experiment comprised 12 sessions where participants were presented with the 11,040 THINGS images (8,740 unique images, catch trials excluded, 500 ms presentation followed by 4 s of fixation). For details on the procedure of the fMRI and behavioural experiments, please consult the original publication of the datasets57.
Behavioural similarity judgements in the THINGS-data collection were collected in a triplet odd-one-out study using the online crowdsourcing platform Amazon Mechanical Turk. The participants were presented with three object images side by side and were asked to indicate which object they perceived to be the odd one out. Each task comprised 20 odd-one-out trials, and the participants could perform as many tasks as they liked.
MRI data acquisition and preprocessing
Whole-brain fMRI images were acquired with 2 mm isotropic resolution and a repetition time of 1.5 s. The MRI data were preprocessed with the standard pipeline fMRIPrep105, which included slice time correction, head motion correction, susceptibility distortion correction, co-registration between functional and T1-weighted anatomical images, brain tissue segmentation, and cortical surface reconstruction. Additionally, cortical flat maps were manually generated106. The fMRI data were denoised with a semi-automated procedure based on independent component analysis, which was developed specifically for the THINGS-fMRI dataset. The retinotopic mapping data and functional localizer data were used to define retinotopic visual regions as well as the category-selective regions used in this study. Image-wise response estimates were obtained by fitting a single-trial model to the fMRI time series of each functional run while accounting for variation in haemodynamic response shape and mitigating overfitting107,108,109.
Behavioural embedding
To predict the neural response to seen objects, we used a recent, openly available model of representational dimensions underlying human similarity judgements of objects52. This model was trained to estimate a low-dimensional, sparse and non-negative embedding predictive of individual trial choices in an odd-one-out task on 1,854 object images. The dimensions of this embedding have been demonstrated to be highly predictive of human similarity judgements while yielding human-interpretable dimensions reflecting both perceptual (for example, ‘red’ and ‘round’) and conceptual (for example, ‘animal-related’) object properties. We used a recent 66-dimensional embedding trained on 4.7 million odd-one-out judgements on triplets of 1,854 object images57.
While the original embedding was trained on one example image for each of the 1,854 object concepts, it may not account for differences between exemplars of the same object concept. For example, the colour of the apple the model was trained on might have been red, while we also presented participants with images of a green apple. This may underestimate the model’s potential to capture variance in brain responses to visually presented object images. To address this, we extended the original embedding by predicting the 66 object dimensions for each individual image in the THINGS database82. To this end, we used the neural network model CLIP-ViT, which is a multimodal model trained on image–text pairs and which was recently demonstrated to yield excellent prediction of human similarity judgements65,69. For each of the 1,854 object images, we extracted the activity pattern from the final layer of the image encoder. Then, for each of the 66 dimensions, we fitted a ridge regression model to predict dimension values, using cross-validation to determine the regularization hyperparameter. Finally, we applied the learned regression model to activations for all images in the THINGS database. This resulted is a 66-dimensional embedding that captures the mental representation of all 26,107 THINGS images. We used these predicted dimension values to predict fMRI responses to the subset of 8,740 unique images presented in fMRI, which yielded consistent improvements in explained variance for all dimensions (Supplementary Fig. 1).
Encoding model
We used a voxel-wise encoding model of the 66-dimensional similarity embedding to predict image-wise fMRI responses to test (1) how well the model predicts neural responses in different parts of the visual system and (2) how neural tuning to individual dimensions maps onto the topography of visual cortex.
Linear regression on fMRI single-trial estimates
To test how well the core object dimensions predict brain responses in different parts of the visual system, we fit them to the fMRI single-trial response estimates using ordinary least squares regression. While most analyses in this work rely on a more powerful parametric modulation model estimated on time-series data (see below), we used single-trial responses for estimating the predictivity of the object dimensions, since this approach does not require extracting the contribution of the parametric modulators for estimating the explained variance of the general linear model. We evaluated the prediction performance of this encoding model in a leave-one-session-out cross-validation, using the average correlation between predicted and observed fMRI responses across folds. Within each cross-validation fold, we also computed a null distribution of correlation values based on 10,000 random permutations of the held-out test data. To assess statistical significance, we obtained voxel-wise P values by comparing the estimated correlation with the generated null distribution and corrected for multiple comparisons on the basis of a false discovery rate of P < 0.01. We computed noise-ceiling-corrected R2 values by dividing the original R2 of the model by the noise ceiling estimates, for each voxel separately. These single-trial noise ceilings (Supplementary Fig. 7) were provided with the fMRI dataset and were computed on the basis of estimates of the signal and noise variance, which were based on the variability of responses to repeatedly presented images57.
Parametric modulation on fMRI time series
To evaluate the contribution of individual object dimensions to the neural response in a given voxel, we used a parametric modulation model on the voxel-wise time-series data. In this parametric modulation, a general onset regressor accounts for the average response across all trials, and a set of 66 parametric modulators account for the modulation of the BOLD signal by individual object dimensions. To compile the parametric modulation model, we constructed dimension-specific onset regressors and mean-centred each parametric modulator to make them orthogonal to the general onset regressor. We then convolved these regressors with a haemodynamic response function (HRF) to obtain predictors of the BOLD response. To account for variation in the shape of the HRF, we determined the best-fitting HRF for each voxel on the basis of a library of 20 HRFs107,108. The resulting design matrix was then concatenated and fit to the fMRI time-series data. To mitigate overfitting, we regularized the regression weights using fractional ridge regression109. We chose a range of regularization parameters from 0.10 to 0.90 in steps of 0.10 and from 0.90 to 1.00 in steps of 0.01 to more densely sample values that reflect less regularization. We determined the best hyperparameter combination (20 HRFs and 26 regularization parameters) for each voxel on the basis of the amount of variance explained in a 12-fold between-session cross-validation. Finally, we fit the model with the best hyperparameter combination per voxel to the entire dataset, yielding 66 statistical maps of regression weights representing the voxel-wise contribution of individual object dimensions in predicting the fMRI signal. The regularization hyperparameter turned out to be small throughout visual cortex (Supplementary Fig. 8), demonstrating that the regularization of regression weights had little impact on the absolute size of regression weights. While our analysis was focused on individual participants, we also estimated the consistency of the tuning maps of individual dimensions across participants. To this end, we used a number of individually defined regions of interest as anchor points for quantifying similarities and differences between these maps. First, for each dimension separately, we obtained mean β patterns across these regions, including early visual retinotopic areas (V1–V3 and hV4) as well as face- (FFA and OFA), body- (EBA) and scene-selective (PPA, OPA and MPA) regions. Face-, body- and scene-selective regions were analysed separately for each hemisphere to account for potential lateralized effects, and voxels with a noise ceiling smaller than 2% were excluded from the analysis. Finally, to quantify the replicability across participants, we computed the inter-participant correlation on the basis of these mean β patterns, separately for each dimension (Supplementary Fig. 4).
Regional tuning profiles and most representative object images
To explore the functional selectivity implied by regional tuning to core object dimensions, we extracted tuning profiles for different visual brain regions and related them to the multidimensional representation of all object images in the THINGS database82 using a high-throughput approach. First, we extracted the regression weights resulting from the parametric modulation model in different visual brain regions: V1, V2, V3, hV4, OFA, FFA, EBA, PPA, MPA and OPA. We then averaged these regional tuning profiles across participants and set negative weights to zero, given that the predicted dimensions reflect non-negative values as well. We plotted the regional tuning profiles as rose plots to visualize the representation of core object dimensions in these brain regions. To explore the regional selectivity for specific object images, we determined the cosine similarity between each regional tuning profile and the model representation of all 26,107 images in the THINGS database. This allowed us to identify those THINGS images that are most representative of the local representational profile in different visual brain regions.
Representational sparseness
We estimated the sparseness of the representation of core object dimensions on the basis of the regression weights from the parametric modulation model. Given our aim of identifying local clusters of similarly tuned voxels, we performed spatial smoothing on the regression weight maps (4 mm full-width at half-maximum) to increase the spatial signal-to-noise ratio. We then took the vectors representing the 66-dimensional tuning profile for each voxel and removed negative vector elements, mirroring the analysis of the regional tuning profiles. We computed the sparseness of the resulting voxel-wise tuning vectors on the basis of a previously introduced sparseness measure, which is based on the normalized relationship between the L-1 and L-2 norm of a vector110:
where s indicates the sparseness of the n-dimensional input vector x. A sparseness value of 1 indicates a perfectly sparse representation where all vector elements except one have the same value. In turn, a value of 0 indicates a perfectly dense representation where all elements have identical values. We computed this sparseness measure over the regression weights in each voxel, which yielded a sparseness measure as a single value per voxel. To assess their statistical significance, we first identified the distribution of sparseness values in a noise pool of voxels. This noise pool included voxels where the parametric modulation model predicted the fMRI signal poorly in the cross-validation procedure (R2 < 0.0001). Since visual inspection of sparseness histograms suggested a log-normal distribution, we log-transformed all sparseness values to convert them to a normal distribution. Finally, we estimated the mean and standard deviation of the sparseness distribution in the noise pool, allowing us to obtain z and P values of the sparseness in each voxel.
On the basis of these results, we explored whether local clusters of representational sparseness are indicative of brain regions with high functional selectivity. To this end, we identified two regional clusters of high sparseness values which were present in all participants and which had not yet been defined on the basis of the functional localizer experiment (see ‘MRI data acquisition and preprocessing’). On the basis of visual inspection of the sparseness maps, we defined two regions of interest. The first region of interest was located in the right ventro-temporal cortex, anterior to anatomically defined area FG4 (ref. 88) and functionally defined FFA, but posterior to the anterior temporal face patch89. The second region of interest was located in the orbitofrontal cortex. We probed the functional selectivity of these sparsely tuned regions by extracting regional tuning profiles and determining the most representative object images as described in the previous section.
Variance partitioning of object-category-based versus dimension-based models
The aim of the variance partitioning was to test whether object dimensions or object categories offer a better model of neural responses to object images. To this end, we compiled a multidimensional and categorical model and compared the respective amount of shared and unique variance explained by these models.
We used 50 superordinate object categories provided in the THINGSplus metadata collection to construct a category encoding model97 (see Supplementary Methods 3 for a full list). To account for cases where images contained multiple objects (for example, an image of ‘ring’ might also contain a finger), we used the image annotations in the THINGSplus metadata97 and manually matched these annotations to objects in the THINGS database for all images presented in the fMRI experiment. Lastly, we added two more categories by manually identifying images containing human faces or body parts. We then compiled an encoding model with 52 binary regressors encoding the high-level categories of all respective objects.
Next, we compiled a corresponding encoding model of object dimensions. Note that we predicted that this model would outperform the categorical model in explaining variance in neural responses. To conservatively test this prediction, we biased our analysis in favour of the categorical model by selecting fewer dimensions than categories. To this end, for each category we identified the object dimension with the strongest relationship based on the area under the curve metric. Since some dimensions are diagnostic for multiple categories (for example, ‘animal-related’ might be the most diagnostic dimension for both ‘bird’ and ‘insect’), this resulted in a one-to-many mapping between 30 dimensions and 50 categories (see Supplementary Methods 3 for a full list of selected dimensions).
To compare the predictive potential of these two models, we fitted them to the fMRI single-trial responses in a voxel-wise linear regression and performed variance partitioning. To estimate the uniquely explained variance, we first orthogonalized the target model and the data with respect to the other model111. This effectively removed the shared variance from both the target model and the data. We then fit the residuals of the target model to the residuals of the data and calculated the coefficient of determination (R2) in a 12-fold between-session cross-validation as an estimate of the unique variance explained by the target model. We then estimated the overall variance explained by both models by concatenating the two models, fitting the resulting combined model to the data and determining the cross-validated R2 estimate. Lastly, we computed an estimate of the shared variance explained by the two models by subtracting the uniquely explained variances from the overall explained variance. For visualization purposes, R2 values were normalized by the noise ceiling estimates provided with the fMRI dataset57 (Supplementary Fig. 7). We also visualized the relationship between the performance of both models quantitatively. To that end, we selected voxels with a noise ceiling of greater than 5% in early (V1–V3) and higher-level (face-, body- and scene-selective) regions of interest and created scatter plots comparing the variance uniquely explained by the category- and dimensions-based models in these voxels (Supplementary Fig. 5). To summarize the extent of explained variance, we computed median and maximum values for the shared and unique explained variances in these voxels.
Reporting summary
Further information on research design is available in the Nature Portfolio Reporting Summary linked to this article.
Data availability
The data supporting our analyses were obtained from the publicly available THINGS-fMRI dataset. The fMRI dataset is accessible on OpenNeuro (https://doi.org/10.18112/openneuro.ds004192.v1.0.5) and via Figshare at https://doi.org/10.25452/figshare.plus.c.6161151 (ref. 112). The object dimensions embedding underlying behavioural similarity judgements that was used to predict the fMRI responses is available at the Open Science Framework repository (https://osf.io/f5rn6/). The higher-level object category labels that were used to construct a categorical model of object responses are part of the THINGSplus metadata and available at the Open Science Framework (https://osf.io/jum2f/). The BOLD5000 fMRI data, including all image stimuli, are openly available on the KiltHub repository hosted on Figshare at https://doi.org/10.1184/R1/14456124 (ref. 113).
Code availability
The Python code (version 3.7.6) used for data processing, analysis and visualization in this study is publicly available on GitHub (https://github.com/ViCCo-Group/dimension_encoding).
References
Mishkin, M. & Ungerleider, L. G. Contribution of striate inputs to the visuospatial functions of parieto-preoccipital cortex in monkeys. Behav. Brain Res. 6, 57–77 (1982).
Goodale, M. A. & Milner, A. D. Separate visual pathways for perception and action. Trends Neurosci. 15, 20–25 (1992).
DiCarlo, J. J., Zoccolan, D. & Rust, N. C. How does the brain solve visual object recognition? Neuron 73, 415–434 (2012).
Marr, D. Vision: A Computational Investigation into the Human Representation and Processing of Visual Information (MIT Press, 2010).
Hubel, D. H. & Wiesel, T. N. Receptive fields, binocular interaction and functional architecture in the cat’s visual cortex. J. Physiol. 160, 106–154 (1962).
Kanwisher, N. & Yovel, G. The fusiform face area: a cortical region specialized for the perception of faces. Phil. Trans. R. Soc. B 361, 2109–2128 (2006).
Downing, P. E. & Kanwisher, N. A cortical area specialized for visual processing of the human body. J. Vis. 1, 341 (2010).
Epstein, R. A. & Kanwisher, N. A cortical representation of the local visual environment. Nature 392, 598–601 (1998).
Kanwisher, N., McDermott, J. & Chun, M. M. The fusiform face area: a module in human extrastriate cortex specialized for face perception. J. Neurosci. 17, 4302–4311 (1997).
Puce, A., Allison, T., Asgari, M., Gore, J. C. & McCarthy, G. Differential sensitivity of human visual cortex to faces, letterstrings, and textures: a functional magnetic resonance imaging study. J. Neurosci. 16, 5205–5215 (1996).
Martin, A., Wiggs, C. L., Ungerleider, L. G. & Haxby, J. V. Neural correlates of category-specific knowledge. Nature 379, 649–652 (1996).
Cohen, M. A., Alvarez, G. A., Nakayama, K. & Konkle, T. Visual search for object categories is predicted by the representational architecture of high-level visual cortex. J. Neurophysiol. 117, 388–402 (2017).
Carlson, T. A., Ritchie, J. B., Kriegeskorte, N., Durvasula, S. & Ma, J. Reaction time for object categorization is predicted by representational distance. J. Cogn. Neurosci. 26, 132–142 (2014).
Ritchie, J. B., Tovar, D. A. & Carlson, T. A. Emerging object representations in the visual system predict reaction times for categorization. PLoS Comput. Biol. 11, e1004316 (2015).
Ritchie, J. B. & Carlson, T. A. Neural decoding and ‘inner’ psychophysics: a distance-to-bound approach for linking mind, brain, and behavior. Front. Neurosci. 10, 190 (2016).
Hung, C. P., Kreiman, G., Poggio, T. & DiCarlo, J. J. Fast readout of object identity from macaque inferior temporal cortex. Science 310, 863–866 (2005).
Singer, J. J. D., Karapetian, A., Hebart, M. N. & Cichy, R. M. The link between visual representations and behavior in human scene perception. Preprint at bioRxiv https://doi.org/10.1101/2023.08.17.553708 (2023).
Kanwisher, N. & Barton, J. J. S. The functional architecture of the face system: integrating evidence from fMRI and patient studies. in The Oxford Handbook of Face Perception (eds. Calder, A. J., Rhodes, G., Johnson, M. H. & Haxby, J. V.) 111–129 (Oxford Univ. Press Oxford, 2011).
Moro, V. et al. The neural basis of body form and body action agnosia. Neuron 60, 235–246 (2008).
Wada, Y. & Yamamoto, T. Selective impairment of facial recognition due to a haematoma restricted to the right fusiform and lateral occipital region. J. Neurol. Neurosurg. Psychiatry 71, 254–257 (2001).
Konen, C. S., Behrmann, M., Nishimura, M. & Kastner, S. The functional neuroanatomy of object agnosia: a case study. Neuron 71, 49–60 (2011).
Schiltz, C. et al. Impaired face discrimination in acquired prosopagnosia is associated with abnormal response to individual faces in the right middle fusiform gyrus. Cereb. Cortex 16, 574–586 (2006).
Bracci, S. & Op de Beeck, H. P. Understanding human object vision: a picture is worth a thousand representations. Annu. Rev. Psychol. 74, 113–135 (2023).
Krakauer, J. W., Ghazanfar, A. A., Gomez-Marin, A., MacIver, M. A. & Poeppel, D. Neuroscience needs behavior: correcting a reductionist bias. Neuron 93, 480–490 (2017).
Peelen, M. V. & Downing, P. E. Category selectivity in human visual cortex: beyond visual object recognition. Neuropsychologia 105, 177–183 (2017).
Cox, D. D. Do we understand high-level vision? Curr. Opin. Neurobiol. 25, 187–193 (2014).
Kravitz, D. J., Saleem, K. S., Baker, C. I., Ungerleider, L. G. & Mishkin, M. The ventral visual pathway: an expanded neural framework for the processing of object quality. Trends Cogn. Sci. 17, 26–49 (2013).
Caramazza, A. & Shelton, J. R. Domain-specific knowledge systems in the brain: the animate–inanimate distinction. J. Cogn. Neurosci. 10, 1–34 (1998).
Konkle, T. & Caramazza, A. Tripartite organization of the ventral stream by animacy and object size. J. Neurosci. 33, 10235–10242 (2013).
Kriegeskorte, N. Relating population-code representations between man, monkey, and computational models. Front. Neurosci. 3, 363–373 (2009).
Bao, P., She, L., McGill, M. & Tsao, D. Y. A map of object space in primate inferotemporal cortex. Nature 583, 103–108 (2020).
Konkle, T. & Oliva, A. A real-world size organization of object responses in occipitotemporal cortex. Neuron 74, 1114–1124 (2012).
Coggan, D. D. & Tong, F. Spikiness and animacy as potential organizing principles of human ventral visual cortex. Cereb. Cortex 33, 8194–8217 (2023).
Huth, A. G., Nishimoto, S., Vu, A. T. & Gallant, J. L. A continuous semantic space describes the representation of thousands of object and action categories across the human brain. Neuron 76, 1210–1224 (2012).
Martin, A. The representation of object concepts in the brain. Annu. Rev. Psychol. 58, 25–45 (2007).
Mahon, B. Z. & Caramazza, A. What drives the organization of object knowledge in the brain? Trends Cogn. Sci. 15, 97–103 (2011).
Haxby, J. V. et al. Distributed and overlapping representations of faces and objects in ventral temporal cortex. Science 293, 2425–2430 (2001).
Op de Beeck, H. P., Haushofer, J. & Kanwisher, N. G. Interpreting fMRI data: maps, modules and dimensions. Nat. Rev. Neurosci. 9, 123–135 (2008).
Arcaro, M. J. & Livingstone, M. S. On the relationship between maps and domains in inferotemporal cortex. Nat. Rev. Neurosci. 22, 573–583 (2021).
Nasr, S. & Tootell, R. B. H. A cardinal orientation bias in scene-selective visual cortex. J. Neurosci. 32, 14921–14926 (2012).
Nasr, S., Echavarria, C. E. & Tootell, R. B. H. Thinking outside the box: rectilinear shapes selectively activate scene-selective cortex. J. Neurosci. 34, 6721–6735 (2014).
Coggan, D. D., Baker, D. H. & Andrews, T. J. Selectivity for mid-level properties of faces and places in the fusiform face area and parahippocampal place area. Eur. J. Neurosci. 49, 1587–1596 (2019).
Andrews, T. J., Clarke, A., Pell, P. & Hartley, T. Selectivity for low-level features of objects in the human ventral stream. NeuroImage 49, 703–711 (2010).
Coggan, D. D., Liu, W., Baker, D. H. & Andrews, T. J. Category-selective patterns of neural response in the ventral visual pathway in the absence of categorical information. NeuroImage 135, 107–114 (2016).
Rice, G. E., Watson, D. M., Hartley, T. & Andrews, T. J. Low-level image properties of visual objects predict patterns of neural response across category-selective regions of the ventral visual pathway. J. Neurosci. 34, 8837–8844 (2014).
Yargholi, E. & Op de Beeck, H. Category trumps shape as an organizational principle of object space in the human occipitotemporal cortex. J. Neurosci. 43, 2960–2972 (2023).
Downing, P. E., Chan, A. W.-Y., Peelen, M. V., Dodds, C. M. & Kanwisher, N. Domain specificity in visual cortex. Cereb. Cortex 16, 1453–1461 (2006).
Mur, M. et al. Human object-similarity judgments reflect and transcend the primate-IT object representation. Front. Psychol. 4, 128 (2013).
Charest, I., Kievit, R. A., Schmitz, T. W., Deca, D. & Kriegeskorte, N. Unique semantic space in the brain of each beholder predicts perceived similarity. Proc. Natl Acad. Sci. USA 111, 14565–14570 (2014).
Cichy, R. M., Kriegeskorte, N., Jozwik, K. M., van den Bosch, J. J. F. & Charest, I. The spatiotemporal neural dynamics underlying perceived similarity for real-world objects. NeuroImage 194, 12–24 (2019).
Magri, C. & Konkle, T. Comparing facets of behavioral object representation: implicit perceptual similarity matches brains and models. In 2019 Conference on Cognitive Computational Neuroscience (2019).
Hebart, M. N., Zheng, C. Y., Pereira, F. & Baker, C. I. Revealing the multidimensional mental representations of natural objects underlying human similarity judgements. Nat. Hum. Behav. 4, 1173–1185 (2020).
Ashby, F. G. & Perrin, N. A. Toward a unified theory of similarity and recognition. Psychol. Rev. 95, 124–150 (1988).
Nosofsky, R. M. Choice, similarity, and the context theory of classification. J. Exp. Psychol. Learn. Mem. Cogn. 10, 104–114 (1984).
Shepard, R. N. Toward a universal law of generalization for psychological science. Science 237, 1317–1323 (1987).
Edelman, S. Representation is representation of similarities. Behav. Brain Sci. 21, 449–498 (1998).
Hebart, M. N. et al. THINGS-data, a multimodal collection of large-scale datasets for investigating object representations in human brain and behavior. eLife 12, e82580 (2023).
Bracci, S. & Op de Beeck, H. Dissociations and associations between shape and category representations in the two visual pathways. J. Neurosci. 36, 432–444 (2016).
Kriegeskorte, N. et al. Matching categorical object representations in inferior temporal cortex of man and monkey. Neuron 60, 1126–1141 (2008).
Almeida, J. et al. Neural and behavioral signatures of the multidimensionality of manipulable object processing. Commun. Biol. 6, 940 (2023).
Zheng, C. Y., Pereira, F., Baker, C. I. & Hebart, M. N. Revealing interpretable object representations from human behavior. Preprint at https://doi.org/10.48550/arXiv.1901.02915 (2019).
Groen, I. I. A., Silson, E. H. & Baker, C. I. Contributions of low- and high-level properties to neural processing of visual scenes in the human brain. Phil. Trans. R. Soc. B 372, 20160102 (2017).
Naselaris, T., Allen, E. & Kay, K. Extensive sampling for complete models of individual brains. Curr. Opin. Behav. Sci. 40, 45–51 (2021).
Radford, A. et al. Learning transferable visual models from natural language supervision. In Proc. 38th International Conference on Machine Learning (eds Meila, M. & Zhang, T.) Vol. 139, 8748–8763 (PMLR, 2021).
Muttenthaler, L. et al. in Advances in Neural Information Processing Systems (eds Oh, A. et al.) Vol. 36, 50978–51007 (Curran Associates, 2023).
Muttenthaler, L. & Hebart, M. N. THINGSvision: a Python toolbox for streamlining the extraction of activations from deep neural networks. Front. Neuroinform. 15, 679838 (2021).
Wang, A. Y., Kay, K., Naselaris, T., Tarr, M. J. & Wehbe, L. Better models of human high-level visual cortex emerge from natural language supervision with a large and diverse dataset. Nat. Mach. Intell. 5, 1415–1426 (2023).
Conwell, C., Prince, J. S., Kay, K. N., Alvarez, G. A. & Konkle, T. What can 1.8 billion regressions tell us about the pressures shaping high-level visual representation in brains and machines? Preprint at bioRxiv https://doi.org/10.1101/2022.03.28.485868 (2023).
Kaniuth, P., Mahner, F. P., Perkuhn, J. & Hebart, M. N. A high-throughput approach for the efficient prediction of perceived similarity of natural objects. Preprint at bioRxiv https://doi.org/10.1101/2024.06.28.601184 (2024).
Chang, N. et al. BOLD5000, a public fMRI dataset while viewing 5000 visual images. Sci. Data 6, 49 (2019).
Gauthier, I., Skudlarski, P., Gore, J. C. & Anderson, A. W. Expertise for cars and birds recruits brain areas involved in face recognition. Nat. Neurosci. 3, 191–197 (2000).
O’Craven, K. M. & Kanwisher, N. Mental imagery of faces and places activates corresponding stimulus-specific brain regions. J. Cogn. Neurosci. 12, 1013–1023 (2000).
Epstein, R. A., Higgins, J. S. & Thompson-Schill, S. L. Learning places from views: variation in scene processing as a function of experience and navigational ability. J. Cogn. Neurosci. 17, 73–83 (2005).
Grill-Spector, K. The neural basis of object perception. Curr. Opin. Neurobiol. 13, 159–166 (2003).
Hasson, U., Harel, M., Levy, I. & Malach, R. Large-scale mirror-symmetry organization of human occipito-temporal object areas. Neuron 37, 1027–1041 (2003).
Silson, E. H., Steel, A. D. & Baker, C. I. Scene-selectivity and retinotopy in medial parietal cortex. Front. Hum. Neurosci. 10, 412 (2016).
Khosla, M., Ratan Murty, N. A. & Kanwisher, N. A highly selective response to food in human visual cortex revealed by hypothesis-free voxel decomposition. Curr. Biol. 32, 4159–4171.e9 (2022).
Jain, N. et al. Selectivity for food in human ventral visual cortex. Commun. Biol. 6, 175 (2023).
Pennock, I. M. L. et al. Color-biased regions in the ventral visual pathway are food selective. Curr. Biol. 33, 134–146.e4 (2023).
Martin, A. & Weisberg, J. Neural foundations for understanding social and mechanical concepts. Cogn. Neuropsychol. 20, 575–587 (2003).
He, C., Hung, S.-C. & Cheung, O. S. Roles of category, shape, and spatial frequency in shaping animal and tool selectivity in the occipitotemporal cortex. J. Neurosci. 40, 5644–5657 (2020).
Hebart, M. N. et al. THINGS: a database of 1,854 object concepts and more than 26,000 naturalistic object images. PLoS ONE 14, e0223792 (2019).
Hubel, D. H. & Wiesel, T. N. Receptive fields and functional architecture of monkey striate cortex. J. Physiol. 195, 215–243 (1968).
Livingstone, M. S. & Hubel, D. H. Anatomy and physiology of a color system in the primate visual cortex. J. Neurosci. 4, 309–356 (1984).
Tootell, R. B. et al. Functional analysis of V3A and related areas in human visual cortex. J. Neurosci. 17, 7060–7078 (1997).
Kastner, S. et al. Modulation of sensory suppression: implications for receptive field sizes in the human visual cortex. J. Neurophysiol. 86, 1398–1411 (2001).
Smith, A. T., Singh, K. D., Williams, A. L. & Greenlee, M. W. Estimating receptive field size from fMRI data in human striate and extrastriate visual cortex. Cereb. Cortex 11, 1182–1190 (2001).
Rosenke, M. et al. A cross-validated cytoarchitectonic atlas of the human ventral visual stream. NeuroImage 170, 257–270 (2018).
Rajimehr, R., Young, J. C. & Tootell, R. B. H. An anterior temporal face patch in human cortex, predicted by macaque maps. Proc. Natl Acad. Sci. USA 106, 1995–2000 (2009).
Henssen, A. et al. Cytoarchitecture and probability maps of the human medial orbitofrontal cortex. Cortex 75, 87–112 (2016).
Simmons, W. K., Martin, A. & Barsalou, L. W. Pictures of appetizing foods activate gustatory cortices for taste and reward. Cereb. Cortex 15, 1602–1608 (2005).
Avery, J. et al. Dissociable prefrontal and limbic brain networks represent distinct information about the healthiness and pleasantness of food. Preprint at PsyArXiv https://doi.org/10.31234/osf.io/9qswa (2023).
Small, D. M. et al. The role of the human orbitofrontal cortex in taste and flavor processing. Ann. N. Y. Acad. Sci. 1121, 136–151 (2007).
Rolls, E. T. The orbitofrontal cortex, food reward, body weight and obesity. Soc. Cogn. Affect. Neurosci. 18, nsab044 (2023).
Lashkari, D., Vul, E., Kanwisher, N. & Golland, P. Discovering structure in the space of fMRI selectivity profiles. NeuroImage 50, 1085–1098 (2010).
Grill-Spector, K. & Weiner, K. S. The functional architecture of the ventral temporal cortex and its role in categorization. Nat. Rev. Neurosci. 15, 536–548 (2014).
Stoinski, L. M., Perkuhn, J. & Hebart, M. N. THINGSplus: new norms and metadata for the THINGS database of 1854 object concepts and 26,107 natural object images. Behav. Res. Methods 56, 1583–1603 (2023).
DiCarlo, J. J. & Cox, D. D. Untangling invariant object recognition. Trends Cogn. Sci. 11, 333–341 (2007).
Kanwisher, N. Functional specificity in the human brain: a window into the functional architecture of the mind. Proc. Natl Acad. Sci. USA 107, 11163–11170 (2010).
Martin, C. B., Douglas, D., Newsome, R. N., Man, L. L. & Barense, M. D. Integrative and distinctive coding of visual and conceptual object features in the ventral visual stream. eLife 7, e31873 (2018).
Devereux, B. J., Tyler, L. K., Geertzen, J. & Randall, B. The Centre for Speech, Language and the Brain (CSLB) concept property norms. Behav. Res. Methods 46, 1119–1127 (2014).
Williams, M. A., Dang, S. & Kanwisher, N. G. Only some spatial patterns of fMRI response are read out in task performance. Nat. Neurosci. 10, 685–686 (2007).
Gibson, J. J. The Ecological Approach to Visual Perception (Houghton, Mifflin, 1979).
Kay, K. N., Naselaris, T., Prenger, R. J. & Gallant, J. L. Identifying natural images from human brain activity. Nature 452, 352–355 (2008).
Esteban, O. et al. fMRIPrep: a robust preprocessing pipeline for functional MRI. Nat. Methods 16, 111–116 (2019).
Gao, J. S., Huth, A. G., Lescroart, M. D. & Gallant, J. L. Pycortex: an interactive surface visualizer for fMRI. Front. Neuroinform. 9, 23 (2015).
Allen, E. J. et al. A massive 7T fMRI dataset to bridge cognitive neuroscience and artificial intelligence. Nat. Neurosci. 25, 116–126 (2022).
Prince, J. S. et al. Improving the accuracy of single-trial fMRI response estimates using GLMsingle. eLife 11, e77599 (2022).
Rokem, A. & Kay, K. Fractional ridge regression: a fast, interpretable reparameterization of ridge regression. Gigascience 9, giaa133 (2020).
Hoyer, P. O. Non-negative matrix factorization with sparseness constraints. J. Mach. Learn. Res. 5, 1457–1469 (2004).
Mumford, J. A., Poline, J.-B. & Poldrack, R. A. Orthogonalization of regressors in FMRI models. PLoS ONE 10, e0126255 (2015).
Hebart, M. et al. THINGS-data: a multimodal collection of large-scale datasets for investigating object representations in brain and behavior. Figshare https://doi.org/10.25452/figshare.plus.c.6161151 (2023).
Chang, N. et al. BOLD5000 Release 2.0. Carnegie Mellon University. Dataset. https://doi.org/10.1184/R1/14456124 (2021).
Acknowledgements
We thank P. Kaniuth for his help with image-wise dimension predictions, M. Holzner for her help with identifying background objects in images and finding copyright-free alternative images for publication, and J. Prince for sharing cortical flat maps for the BOLD5000 data. This work was supported by a doctoral student fellowship awarded to O.C. by the Max Planck School of Cognition, the Intramural Research Program of the National Institutes of Health (ZIA-MH-002909), under National Institute of Mental Health Clinical Study Protocol 93-M-1070 (NCT00001360), a research group grant by the Max Planck Society awarded to M.N.H., the ERC Starting Grant project COREDIM (ERC-StG-2021-101039712) and the Hessian Ministry of Higher Education, Science, Research and Art (LOEWE Start Professorship to M.N.H. and Excellence Program ‘The Adaptive Mind’). The funders had no role in study design, data collection and analysis, decision to publish or preparation of the manuscript.
Funding
Open access funding provided by Max Planck Society.
Author information
Authors and Affiliations
Contributions
O.C., C.I.B. and M.N.H. conceived the study. O.C. carried out the data analysis and wrote the original draft of the manuscript. C.I.B. and M.N.H. reviewed the manuscript and provided critical feedback. M.N.H. supervised the project.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Human Behaviour thanks Maximilian Riesenhuber, Meenakshi Khosla and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. Peer reviewer reports are available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Extended data
Extended Data Fig. 1 Dimension tuning maps 1-36 for Participant 1.
Colors indicate regression weights for each dimension predictor from the parametric modulation encoding model. Labels indicate regions of interest on the cortex: V1-V3: primary - tertiary visual cortex, OFA: occipital face area, FFA: fusiform face area, EBA: extrastriate body area, PPA: parahippocampal place area, MPA: medial place area, OPA: occipital place area.
Extended Data Fig. 2 Dimension tuning maps 37-66 for Participant 1.
Colors indicate regression weights for each dimension predictor from the parametric modulation encoding model. Labels indicate regions of interest on the cortex: V1-V3: primary - tertiary visual cortex, OFA: occipital face area, FFA: fusiform face area, EBA: extrastriate body area, PPA: parahippocampal place area, MPA: medial place area, OPA: occipital place area.
Extended Data Fig. 3 Dimension tuning maps 1-36 for Participant 2.
Colors indicate regression weights for each dimension predictor from the parametric modulation encoding model. Labels indicate regions of interest on the cortex: V1-V3: primary - tertiary visual cortex, OFA: occipital face area, FFA: fusiform face area, EBA: extrastriate body area, PPA: parahippocampal place area, MPA: medial place area, OPA: occipital place area.
Extended Data Fig. 4 Dimension tuning maps 37-66 for Participant 2.
Colors indicate regression weights for each dimension predictor from the parametric modulation encoding model. Labels indicate regions of interest on the cortex: V1-V3: primary - tertiary visual cortex, OFA: occipital face area, FFA: fusiform face area, EBA: extrastriate body area, PPA: parahippocampal place area, MPA: medial place area, OPA: occipital place area.
Extended Data Fig. 5 Dimension tuning maps 1-36 for Participant 3.
Colors indicate regression weights for each dimension predictor from the parametric modulation encoding model. Labels indicate regions of interest on the cortex: V1-V3: primary - tertiary visual cortex, OFA: occipital face area, FFA: fusiform face area, EBA: extrastriate body area, PPA: parahippocampal place area, MPA: medial place area, OPA: occipital place area.
Extended Data Fig. 6 Dimension tuning maps 37-66 for Participant 3.
Colors indicate regression weights for each dimension predictor from the parametric modulation encoding model. Labels indicate regions of interest on the cortex: V1-V3: primary - tertiary visual cortex, OFA: occipital face area, FFA: fusiform face area, EBA: extrastriate body area, PPA: parahippocampal place area, MPA: medial place area, OPA: occipital place area.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Contier, O., Baker, C.I. & Hebart, M.N. Distributed representations of behaviour-derived object dimensions in the human visual system. Nat Hum Behav (2024). https://doi.org/10.1038/s41562-024-01980-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41562-024-01980-y
- Springer Nature Limited