
Abstract
Imaging the internal architecture of fast-vibrating structures at micrometer scale and kilohertz frequencies poses great challenges for numerous applications, including the study of biological oscillators, mechanical testing of materials, and process engineering. Over the past decade, X-ray microtomography with retrospective gating has shown very promising advances in meeting these challenges. However, breakthroughs are still expected in acquisition and reconstruction procedures to keep improving the spatiotemporal resolution, and study the mechanics of fast-vibrating multiscale structures. Thereby, this works aims to improve this imaging technique by minimising streaking and motion blur artefacts through the optimisation of experimental parameters. For that purpose, we have coupled a numerical approach relying on tomography simulation with vibrating particles with known and ideal 3D geometry (micro-spheres or fibres) with experimental campaigns. These were carried out on soft composites, imaged in synchrotron X-ray beamlines while oscillating up to 400 Hz, thanks to a custom-developed vibromechanical device. This approach yields homogeneous angular sampling of projections and gives reliable predictions of image quality degradation due to motion blur. By overcoming several technical and scientific barriers limiting the feasibility and reproducibility of such investigations, we provide guidelines to enhance gated-CT 4D imaging for the analysis of heterogeneous, high-frequency oscillating materials.
Similar content being viewed by others


Introduction
Vibratory motions are ubiquitous in biological processes as well as in mechanical engineering. From low-frequency respiratory or cardiac muscular patterns1,2,3 to high-frequency sound-induced4,5 or flow-induced6,7 vibrations, they cover a broad spectrum of both spatial and temporal scales. Their quasi-periodicity offers the possibility to develop dedicated imaging techniques to study their evolution, which could hardly be imaged otherwise. Thus, stroboscopic methods have been designed to recover an averaged representation of the motion from multiple oscillation periods. In particular, videostroboscopy is one of these pioneering techniques, first developed in the 1950s to image human vocal folds during phonation8,9,10,11 – these structures can vibrate between 50 Hz up to 1500 Hz, with average values of 125 Hz and 210 Hz for men and women’s speech, respectively6,12. Videostroboscopy is now daily used in clinical voice assessment13,14. However, this practice only gives access to 2D views of the external surfaces of the vibrating systems (2D + time). In any case, their internal structure and its evolution remains inaccessible to measurement15. To address this limitation, a few previous studies have combined videostroboscopy with X-ray radiographic imaging16,17,18. Oscillating internal motions have thus become observable, albeit with a visualisation restricted to defined projection direction, and it is disturbed by the superimposed structures.
In order to access the full 3D motion, studies took advantage of the stroboscopic imaging in X-ray Computed Tomography (CT). Indeed, even the current highest acquisition speed in conventional CT—i.e., 1000 tomographies per second (tps) in synchrotron19 with a limited field of view (528\(\times\)120 px) and an extreme sample rotation speed (500 Hz)—is not suitable for continuous imaging of movements faster than the time needed to acquire a sufficient collection of angular projections20,21,22,23,24,25,26. Moreover, the X-ray dose and such extreme acceleration of the sample can distort the movement studied.
The first attempts at stroboscopic X-ray imaging were implemented for medical applications, to measure lung and heart function by analysing low-frequency 3D tissue motion1,2,27,28,29. Such oscillations are not regular over time, so naive stroboscopic methods were not directly applicable. Instead, two adaptive approaches were designed, based on either prospective1,2,30,31,32,33 or retrospective gating4,5,21,28,34,35,36,37,38. Both methods require the additional acquisition of a so-called gating signal, which is a temporal representation of the oscillating movement. For prospective gating, the signal is monitored in real time to trigger the projection acquisition at pre-defined events1,30 (such as the maximum amplitude of an electrocardiogram). For retrospecting gating, projections are acquired at constant rate, and sorted a posteriori according to the on-going motion phase at the time of their exposure, which is given by the analysis of the gating signal28,37. Numerous variants of gating-based X-ray tomography (or gated-CT) have been experimented since the first studies in the early 2000s. Basically, they follow the same progress as conventional X-ray tomography, proposing different scan and rotation schemes32,39,40 (e.g., helical, cine, step-by-step, half-tomography, etc.), phase retrieval methods38,41,42 (e.g., propagation-based, grating interferometry, etc.), and benefiting from the same advances of X-ray sources and imaging instrumentation in terms of spatiotemporal performances33,43,44. Besides, the image analysis methods commonly used for X-ray tomography data45 also remain applicable to such imaging technique. Recent studies demonstrated that the conjugated use of high brilliance synchrotron facilities and judicious gating strategies allow the spatial and temporal resolutions to be improved at least by one order of magnitude each38,40,46. Thus, high frequency oscillations were imaged in 3D, such as the motion of blowfly steering muscles during its 150 Hz wingbeats21,38 at a voxel size of \(3.3~\upmu \hbox {m}\), or the sound-induced vibrations of fish inner ear4 up to 450 Hz and a voxel size of \(2.75~\upmu \hbox {m}\). Other works also successfully applied pure stroboscopic CT on fully controlled periodic oscillations, such as for cyclic compression-tension tests42,47,48, or fluid mechanics experiments49.
Although these studies gave interesting results, acquisition parameters specific to gated-CT are often determined empirically21,38, which causes difficulty to transfer them to any multiscale oscillator. Prior methods have been suggested50, but they were limited to low-frequency movements (i.e., below 10 Hz), and more importantly, they did not propose any guidelines to mitigate motion and streaking artefacts on reconstructed data, caused by the inherent motion and the irregular sampling of the projection space32,36,51,52,53. Hence, the current challenge in optimising gated-CT in the case of fast-oscillating structures is to understand the link between the numerous acquisition parameters involved, and the induced artefacts that can arise on the data.
To address this issue, we have developed an optimisation procedure based on the dialogue between a numerical approach and experimental campaigns carried out with oscillating composite materials in synchrotron X-ray tomographs.
On the one hand, the numerical study relies on tomographic simulations at the scale of the composite reinforcement of known and ideal 3D geometries, such as sphere or fibre. The objective is to reproduce and quantify motion artefacts due to the imaging process. Besides, a method to ensure a quasi-equi-angular sampling of the projection space is also proposed.
On the other hand, gated-CT of soft composite samples subjected to rigid body oscillation were conducted thanks to a custom-developed vibromechanical test rig with a continuous rotation and retrospective gating strategy. Finally, by comparing real and virtual 4D data using image quality indices, the relevance of the methodology was evaluated at various time and spatial scales.
Guidelines towards the optimisation of imaging parameters
Problem statement
Let us consider a heterogeneous medium (e.g., a composite material made of spherical or fibrous inclusions embedded into a matrix) subjected to a sinusoidal rigid body translation, and the 3D motions and evolving microstructure of which are to be characterised. More precisely, we seek to obtain a discrete sequence of the oscillation cycle into a given number N of phases, as illustrated in Fig. 1a,b. For this purpose, retrospectively gated X-ray microtomography can be combined with a continuous-rotation scanning strategy. As previously described by Ford et al.37, the global experimental procedure of such technique relies on four major steps (Fig. 1b,c): (1) the continuous recording of a gating signal representative of the studied periodic motion; (2) the synchronised acquisition of 2D projections; (3) the gating-based sorting of the projections into N phases; (4) 3D image reconstruction of all phases of the oscillation cycle. Process feasibility and 4D (3D + time) image quality will depend on a series of parameters related to X-ray scanning settings and sample geometry and kinematics. These aspects are detailed below and reported in Fig. 1a–c.
-
X-ray scanning parameters: voxel edge length \(L_{vx}\), also known as “pixel size”; synchrotron-beam mean energy for adequate contrast on 3D reconstructed datasets, E; projection sampling rate \(f_s\); total number of projections to be recorded to reconstruct N volumes, \(n^{tot}\).
-
Geometrical parameters: characteristic sample size L, defined as its maximum thickness along the X-ray beam path; average size of the heterogeneities within the sample, \(d_0\).
-
Kinematical parameters: mean oscillation frequency \(f_0\); peak-to-peak oscillation amplitude A.

(a) Illustration of \(N=4\) phases of a cubic sample subjected to a rigid body oscillation. (b) Representation of a typical oscillation period splitted into \(N=4\) temporal phases. (c) Illustration of the phase-based projection sorting procedure for retrospectively gated-CT. (d) Definition of \(\beta _1\), \(\beta _2\) and \(v_{max}\) on a detailed view inside an oscillation period. The times \(t_e\) and \(t_p\) are arbitrary. The red arrow represents the maximum slope during sinusoidal motion, and the blue point a projection acquisition shot-instant.
These parameters are independent, but their values indirectly drive the measurement spatial and temporal resolutions. Spatial resolution refers to the minimum distance required to separate two object features54,55. In conventional tomography, it is partly related to \(L_{vx}\). Temporal resolution refers to the timestep between consecutive tomographic reconstructed 3D images56. In the following, it also corresponds to the duration of one phase \(t_p = (N f_0)^{-1}\) (Fig. 1b). Therefrom, what are the optimal values to assign to all the above parameters to satisfy a targeted temporal resolution?
In order to obtain the image quality needed to quantify microstructural features or local kinematic measurements57,58, previous works have already provided recommendations for the choice of certain parameters such as pixel size and number of projections56,59,60. Although these insights were applied in the case of (quasi-)static experiments, we make the assumption that they are good candidates for gated-CT as well. Therefore, as the image quality depends partly on the number of projections used to reconstruct the 3D dataset based on filtered backprojection approaches, the number of equally spaced projections over a full rotation is chosen based on the commonly accepted rule59: \(n = \pi L / (2 L_{vx})\). Naturally, it then comes \(n^{tot} = N n\). Furthermore, in order to be able to carry out a correct quantification of microstructural parameters, it was demonstrated that heterogeneities have to be sufficiently resolved, i.e., with minimal ratio \(d_0 / L_{vx}\) around 556,60.
In the following, to reduce the number of variables to be optimised, we suggest to fix geometrical parameters, oscillation frequency \(f_0\), beam energy E, voxel size \(L_{vx}\) and temporal resolution \(t_p\) (N, n and \(n^{tot}\) being thus directly deduced from the above equations). Thereby, we focus on quantifying the effect of oscillation amplitude A and projection sampling rate \(f_s\) on the feasibility of the experiment, as well as on the quality of the obtained 4D data. The objective is to propose the user an optimal choice of these parameters, further noted \(A^*\) and \(f_s^*\), as detailed in the next sections.
Vibratory amplitude and motion artefacts
Motion blur descriptors
Depending on the kinematical and X-ray scanning parameters, several motion artefacts may alter the reconstructed 3D dataset, yielding to blurred images with undesired information loss51. Artifacts become more pronounced as sample speed increases. More specifically, knowing the maximal displacement velocity achieved by the sample during its periodic movement \(v_{max}\), two different types of motion blur can be defined, as illustrated in Fig. 1d:
-
(i)
a motion blur directly induced during 2D projections recording, resulting from the relative displacement between the sample and the image sensor during the beam exposure time per projection, \(t_e\). In the following, this motion blur is noted \(\beta _1\). Its maximal magnitude is fairly estimated by the displacement of an object that would move linearly at speed \(v_{max}\) during \(t_e\): \(\beta _1 = A~\pi ~f_{0}~t_e\).
-
(ii)
a motion blur induced during the reconstruction of the 3D data, resulting from the retrospective gating technique and the temporal resolution \(t_p\) used to reconstruct the cycle. Namely, the gathered projections are not taken at the exact same location of an oscillation period (Fig. 1b,c). In the following, this motion blur is noted \(\beta _2\). It is estimated by the displacement of an object that would move linearly at speed \(v_{max}\) during \(t_p\): \(\beta _2 = A~\pi / N\).
Limitation of the motion blur
By definition, both blur descriptors \(\beta _1\) and \(\beta _2\) are linked with A, \(f_0\), N and \(t_e\) (Fig. 1d)—\(f_0\) and N being fixed at this stage. The exposure time \(t_e\) is adjusted prior a gated-CT by performing a series of conventional CT on the sample at rest, under similar scan conditions (i.e., with n projections, a beam energy E, a pixel size \(L_{vx}\)). The shortest value of \(t_e\) resulting in an image quality that allows an accurate quantification is then retained. Once \(t_e\) is fixed, the motion blur descriptors \(\beta _1\) and \(\beta _2\) only depend on the peak-to-peak amplitude of the prescribed sinusoidal motion, A. In the following, we will estimate the critical values \(\beta _1^*\) and \(\beta _2^*\) of these descriptors that must not be exceeded to enable a given quantitative analysis of the images. This will be achieved with the help of a numerical work, by simulating the blurring artefacts at the scale of particles with known and ideal 3D geometry (sphere or fibre) for different couples (\(\beta _1\), \(\beta _2\)), and by quantifying the final image quality compared to a static reference configuration. Finally, this approach will lead to the proposal of an acceptable oscillation amplitude \(A^*\) for the user.
Optimisation of the angular sampling of projections
In order to prevent reconstruction artefacts such as streaks and missing boundaries32,36,52,61,62,63, two main aspects should be considered: (i) the total number of projections, \(n^{tot}\) should be equally distributed between the N phases; (ii) within each phase, the angular sampling of the projections should be regular. Both conditions are directly influenced by the projection sampling rate \(f_s\). It is therefore necessary to understand how to select this parameter while restraining the above artefacts. In the first instance, one could choose \(f_s\) as high as possible. However, depending on \(f_0\), projections for all the phases may not be acquired (see case II, Fig. 2). Therefore, the proposed optimisation relies on the requirement to periodically acquire at least one projection in each of the N phases. With this aim, we first introduce \(i \ge N \; (t_e + t_l) \; f_0\), where \(i \in \mathbb {N}_{\ne 0}\), is the number of oscillation periods of the sample needed to acquire at least one projection in each of the N phases and where \(t_l\) is the minimum latency time between two consecutive exposures (typically equal to the detector readout time). In practice, we choose i as the smallest integer possible such as \(i=\lceil N (t_e + t_l) f_0 \rceil\) to minimise the acquisition duration, except if this leads to a projection sampling rate that requires an unattainable speed of the rotation stage \(\omega\) – which is directly derived from \(f_s\) and \(n^{tot}\). As possible examples, Fig. 2a displays various acquisition cases, yielding to distinct values of i in the case where \(N = 4\). Then, to meet the above requirements, the optimal \(f_s^*\) must fulfil the following condition:
where k includes an anti-aliasing correction as a function of the selected value of i.
Cases I and II shown in Fig. 2a describe the examples where \(i=1\) and \(i=2\), respectively. Therefore, case I shows an appropriate sampling of all the N phases within one oscillation period, whereas case II depicts a wrong sampling which will result in unusable data, characterised by irregular angular distribution of projections possibly combined with angular projection clustering, as illustrated in Fig. 2b. Cases III and IV both show alternatives to remedy this problem, and together with case I, they should produce a relatively regular sampling of projections (“realistic sampling”, Fig. 2b), close to the one obtained in conventional tomography (“ideal sampling”).
The best choice between cases I, III and IV will then depend on the experimental constraints of each study. For example, ideal case I requires compatible detector performances, whereas case III implies a shorter acquisition duration so a lower radiation dose compared to case IV, which, in turn, could give better projection distribution between the phases. Thus, in the following, when case I was not applicable, we chose case III in order to prevent the effect of the dose on specimen, although for many experiments the dose involved is not prohibitive.
Finally, note that in practice, once \(f_s^*\) is found, the latency time between two consecutive exposures \(t_l^{*}\), is such that \(t_l^*=(1/f_s^*)-t_e\). This latency time can then be taken into account when triggering the detector.

(a) Scheme of the different cases for the optimisation of the projection sampling rate, \(f_s\). \(N=4\). (b) Polar histograms of typical angular distribution of the projections of a phase after the sorting process, for illustration purposes. The angle represents the angular position of the projections and the radial axis the number of projections per bin (n = 360 projections, bin width = \(2^{\circ }\)). The ideal sampling is generally obtained in conventional CT. Angular clustering and missing views distribution produce strong image artefacts.
Methods
The general concept and optimisation strategy of imaging parameters presented in the previous section were assessed through a dialogue between numerical simulation and experimental data. On the one hand, the numerical simulation focused on blurring artefacts at the scale of ideal spherical or fibrous inclusions used in composites. On the other hand, a series of gated-CT experiments were carried out on soft silicone composites filled with spherical or fibrous particles, using a priori optimal scanning parameters, as detailed below.
Tomography simulation with motion artefacts
The tomography simulation was coded in Python, following a procedure illustrated in Fig. 3 for the case of spherical reinforcements. For this purpose, two 3D ideal phantoms mimicking the shape (sphere or fibre) and average size of real samples’ heterogeneities were firstly designed. More specifically:
-
(i)
a sphere with a dimensionless diameter \(d_0^* = d_0/L_{vx}\) was generated thanks to the module Kalisphera from the spam software57,64. In particular, a sphere with \(d_0^*=4\) was designed centered in a field of view (FOV) of 11\(\times\)11\(\times\)31 vx (black background).
-
(ii)
a fibre-shaped phantom with a dimensionless diameter of \(d_0^*\) and a dimensionless length of \(l_0^* = 25 d_0^*\) was designed and oriented perpendicularly to the rotation axis (z axis). In particular, a fibre with \(d_0^*=2\) and \(l_0^*=50\) was designed centered in a FOV of 61\(\times\)61\(\times\)31 vx (see Supplementary Fig. S1).
Note that for both cases, a specific caution was paid on the particle-matrix interface, to simulate the partial-volume effect64 which arises in volumetric images when more than one material occurs in a voxel, and which is more pronounced when the heterogeneity size \(d_0\) is close to \(L_{vx}\), i.e., when \(d_0^* \approx 1\).
Then, for each case, a blurred 3D phantom with given motion artefacts (\(\beta _1\), \(\beta _2\)) was designed, as illustrated in Fig. 3 for the case of a sphere. To do so:
-
At first, an initially ideal and smooth 3D particle was designed at a given position \({\textbf {X}}_i\)(0,0,\(z_i\)), whose height \(z_i\) was randomly chosen within a \(\beta _2\)-interval. From this ideal particle, \(10\times \beta _1\) sub-phantoms were replicated and evenly distributed along the z-axis, over a \(\beta _1\)-interval centered on \(z_i\) (see Fig. 3a). Therefrom, a first blurred 3D phantom was generated by averaging all the sub-phantoms to simulate a given motion blur \(\beta _1\), as illustrated in Fig. 3b.
-
Then, the Astra-Toolbox65,66,67 package was used to generate a single projection of this preliminary blurred phantom, considering a parallel beam (see Fig. 3c). This projection was chosen at an angular position \(\theta _i\), \(i \in [1..360^{\circ }]\). Note that, in order to focus only on the effect of the motion blur on image quality and to avoid other artefacts, we chose to oversample the projection domain (360 projections) and to not restrain artificial numeric noise.
-
Finally, steps (a) to (c) were repeated for all \(z_i\) in the \(\beta _2\)-interval and \(\theta _i\), yielding to a series of 360 projections in total. Thus, a 3D volume simulating both target blur descriptors \(\beta _1\) and \(\beta _2\) could be reconstructed, using a filtered backprojection algorithm with the same package (see Fig. 3d).
The motion blurs \(\beta _1\) and \(\beta _2\) were both varied between 0 and 10 px with a 0.5 px step, resulting in a total of 441 simulated tomographies for each phantom.

Procedure used for tomography simulation on a spherical phantom for a given couple of motion blur descriptors. The effect of \(\beta _1\) is visible when generating the projections whereas the one of \(\beta _2\) is only observable after the reconstruction.
Experimental developments
Sample preparation
We fabricated composite samples made of a soft deformable silicone matrix (a two component addition-cure rubber compound EcoflexTM 00-30, Smooth-On; relative density 1.07) reinforced with either solid glass beads (\(\text {Silibeads}^{\circledR }\) SOLID, Sigmund Lindner, density \(\approx\) 2.5 with a mean diameter \(d_0\) \(\approx ~40~\upmu \hbox {m}\); Fig. 4d), or chopped fibreglass (\(\text {Conrad}^{\circledR }\), ref. 2101101, with mean dimensions \(d_0^*=20~\upmu \hbox {m}\) and \(l_0^*\approx 10~d_0^*\)). In any case, the volume fraction of particles was prescribed at \(\approx\) 5%. Samples were prepared as follows. Firstly, the two compounds of the liquid silicone were mixed with a 1A:1B mixing ratio by weight. Then, particles were added and mixed at the defined volume fraction. The resulting mixture was poured in a Petri dish to obtain a 2 mm-thick bulk, and immediately degassed in a vacuum environment for 5 min at \(8\times 10^{3}\) Pa to eliminate air bubbles. Afterwards, it was left for curing at room temperature (T \(\approx\) \({21}^{\circ }\hbox {C}\)) during 24 h, covered to prevent external pollution, and laid on a flat surface to obtain a uniform thickness. Right before the X-ray experiment, the specimens were cut from the bulk using a scalpel to obtain cuboid samples of edge size \(L = 2\) mm, as shown in Fig. 4c.
Vibratory setup

(a) Schematic view of the vibratory setup and its simplified wiring diagram during in situ testing on the PSICHE beamline. (b) Picture of the setup on the motorised rotation stage. To deal with space requirement the setup was inserted inside the hollow stage. (c) 3D rendering of the imaged sample. (d) Optical microscopy image of a representative distribution of the glass beads filling the sample.
A custom vibro-mechanical setup was designed to subject samples to sinusoidal rigid body translation by controlling oscillation frequency \(f_0\) and amplitude A (Fig. 4). The excitation was performed by a small electromechanical shaker (Fig. 4a-i) with embedded amplifier (SmartshakerTM K2007E01, The Modal Shop), able to oscillate in a wide range of frequency (1–1500 Hz). The apparatus was clamped in the test bench with two layers of rubber damping mats in between (Fig. 4a-ii) to prevent the spreading of vibrations in the whole setup. At the output of the shaker, two linear plain bearings (\(\text {drylin}^{\circledR }\) Q, Igus) coupled with a square profile were added to ensure a translation of the exciter tip along z (Fig. 4a-iii). For each oscillation frequency of interest (\(f_0\) varied from 1 to 400 Hz), the amplitude response of the setup was calibrated as a function of the input sinusoidal voltage (variations within ± 1 V) with a laser doppler vibrometer (\(\text {VibroFlex}^{\circledR }\) Xtra VFX-I-120, Polytec). The oscillatory amplitude could be tuned between a few \(\upmu \hbox {m}\) up to 13 mm at lowest frequencies. The control of the applied sine wave was made through a LabView program, and a National Instruments device (NI myDAQ). An acquisition device (NI 9215) was used to acquire the control signal at 100 kHz and the Transistor-Transistor Logic (TTL) signal that came from the microtomograph’s detector which provides the time of projections for synchronisation purpose (see Fig. 4a).
Mechanical tests
As a first step, in order to assess the degradation of image quality due to motion artefacts, tests were carried out on a single composite reinforced with spherical glass beads, vibrating at a fixed frequency \(f_0=100\) Hz, but with different amplitudes \(A^*\) as derived from the theoretical guidelines detailed above. More specifically, three experimental cases (C1, C2, C3) were considered sequentially, while progressively increasing the critical pairs (\(\beta _1^*\), \(\beta _2^*\)) from about (2.5 px, 1 px) up to (8.5 px, 3.5 px), and thus, the prescribed amplitude \(A^*\) from 11 to 34 px (i.e. 105 to \(326~\upmu \hbox {m}\) for a pixel size \(L_{vx}\) \(\approx\) \(9.58~\upmu \hbox {m}\) - see details below on the imaging setup). The experimental parameters for each case are resumed in Table 1.
In a second step, in order to assess the relevance of the measurement strategy more widely, other vibration tests were extended to another particle shape (fibre) and to a higher oscillation frequency \(f_0 = 400\) Hz.
Acquisition procedure and synchrotron X-ray instrumentation
Samples were imaged at the PSICHE beamline of the SOLEIL synchrotron68 (Saint-Aubin, France). The optical setups were chosen to image each composite sample both at rest (scans named as static reference in the following) and while vibrating with a target number of \(N=30\) phases to be captured.
Beamline configuration—High-energy photons (15–100 keV) were produced from a in-vacuum wiggler (fixed gap 4.5 mm) and filtered using an X-ray mirror (Ir surface, 1.9 mrad angle)69, combined with a set of filters to adjust the energy spectrum for pink beam illumination. The imaging configuration leads to a pixel size of \(L_{vx}~=~9.58~\upmu \hbox {m}\), with a FOV = 400\(\times\)400\(\times\)320 vx. The exposure time per projection \(t_e\), was set to 0.2 or 0.8 ms depending on the case under study. The mean photon energy was set to \(E=30.3\) keV (wavelength = 0.409 Å) with a flux of \(2.30\times 10^{12}\) photon \(\hbox {mm}^{-2}\hbox {s}^{-1}\) (obtained with 3.5 mm Al and 0.735 mm Sn filters) for \(t_e\approx 0.2\) ms, and a flux of \(0.96\times 10^{12}\) photon \(\hbox {mm}^{-2}\hbox {s}^{-1}\) (with 3.5 mm Al and 0.608 mm Sn filters) for \(t_e\approx 0.8\) ms. To convert the transmitted X-rays into visible light, a \(250~\upmu \hbox {m}\)-thick Ce-doped LuAG scintillator was placed behind the sample at a propagation distance of 700 mm which resulted in an optimal combination of absorption and phase contrast. Radiographic projections were acquired with a pco.Dimax CMOS HS4 (pixel size = 11\(\times 11~\upmu \hbox {m}^{2}\)) detector mounted on a tandem optic composed of two Hasselblad HC 2.2 / 100 mm lenses.
Gated-CT acquisition procedure—The acquisition procedure consisted of a continuous \(360^{\circ }\)-rotation of the sample stage along the z-axis (Fig. 4a), while acquiring \(n^{tot}\) = 10,000 projections. In practice, the rotation velocity \(\omega\) was about \({37}^{\circ }\hbox {s}^{-1}\), which corresponds to 10 s for the acquisition of a complete gated-CT with \(N=30\) (i.e., \(\approx\) 330 ms to scan a single 3D volume). The optimised projection sampling rate \(f_s^*\) was calculated at 1,033 Hz (Table 1), based on Eq. 1 and selecting case III in Fig. 2. Besides, although a \(180^{\circ }\)-rotation is a priori sufficient to capture a stable oscillation, a multi-rotation approach was chosen here as scanning strategy (i.e., two successive half-turns), to reduce the risk of too many missing views in the event of periodic oscillation being interrupted during the experiment, which would compromise the feasibility of 3D image reconstruction21. As shown by Walker et al.38, this multi-rotation strategy is especially relevant to capture transient phenomena. In our study, unexpected transient events can result from instrumentation failure, material damage or thermal expansion due to the X-ray dose. Finally, this full-turn acquisition was a trade-off between the aforementioned aspect, the technical limit of the rotation stage, the avoidance of inertial effects due to the rotation velocity19,21, and the limitation of rotational motion during X-ray exposures.
Data post-processing
Retrospective gating and projections sorting
After scanning, all projections were sorted according to the current oscillation phase at the time of their exposure, so as to redistribute them into \(N = 30\) phases of one periodic cycle (Fig. 1b). This step relies on the measurement of the duration of successive cycles of a gating signal representative of the motion temporal evolution. In practice, we used the control sinusoidal voltage of the electromechanical shaker as gating signal, and cycles were arbitrarily defined between consecutive valleys of the gating sine wave. Of course, a constant phase shift may exist between the gating signal and the actual motion, albeit without any consequences for the following steps. The phase-based sorting algorithm we employed is illustrated in Fig. 1c.
Tomographic reconstruction
The reconstruction of each 3D volume relative to one temporal phase was performed with the PyHST software70 using a filtered backprojection algorithm coupled with Paganin’s method for phase retrieval41 with a kernel length of 7 px. The center of rotation (COR) of the N datasets was defined manually, using the one given by an automatic COR detection algorithm performed on the corresponding static reference 3D image.
Quality of the 3D images
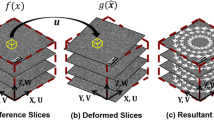
Rigid volume registration—In order to perform a reliable pairwise comparison of the quality of the images obtained by scanning the same sample at rest and in vibration, a one-to-one correspondence was established between the coordinates of the N images of a reconstructed gated-CT and those of its corresponding static reference. The registration of the images to be compared was achieved using the spam software57, which includes a global volume registration function. The registration algorithm minimises the error between the reference volume and the one deformed by \(\Phi\), a linear deformation function. The function \(\Phi\) is an extension of the transformation gradient tensor, taking into account also the translation vector \((t_x, t_y, t_z)\), which together with the rotation describes the rigid-body motion of the sample. The registration for the first phase was unsupervised, whereas the computed function \(\Phi\) was given recursively as a guess for the following phases. The convergence of the registration algorithm was validated according to the criterion57 \(|\delta \Phi | \le 10^{-3}\). The same image processing was also used to measure the 3D displacement (i.e., translations and rotations) of the sample over the 30 phases of the oscillation. In this case, the first phase was consistently considered to be at the initial position: \((t_x, t_y, t_z) = (0, 0, 0).\)
Quality indices of the CT-scans – Two metrics were investigated to assess the image quality, i.e., one based on greyscale images, and the other on thresholded images. They were chosen as representative of typical quantitative image analyses carried out on CT data45.
-
Pearson Correlation Coefficient (PCC): the PCC71 is a global measurement of the linear correlation between two greyscale images. It is defined as the covariance of the two images X and Y, divided by the product of their standard deviations (\(\sigma _X, \sigma _Y\)): \(\text {PCC} = \sigma _{XY}/(\sigma _X \sigma _Y)\). It is based on the same concept as the error of digital volume correlation (DVC), but computed on the whole images. Besides, this index has the benefit of being insensitive to uniform variations in brightness or contrast that could be caused by the low variability of the number of projection n in each phase. PCC values range from -1 to 1. An absolute value of 1 means that the grey level intensities of the two 3D images are perfectly linearly related, and the sign is determined by the regression slope. On the contrary, a value of 0 means that there is no linear dependency between the images. For the specific case of simulated tomographic data, the masked ROI was defined as a centered 6 px diameter cylinder oriented along the translation axis for the 4 px diameter sphere, and a centered \(53\times 5\times 31\) box for the fibre.
-
Segmentation Error on the Volume of Particles (SEVP): we define the SEVP based on the thresholded images, as the error made on the estimation of the particles volume between blurred image, \(V_{blur}\), and its associated static reference, \(V_{ref}\), so that \(\text {SEVP} = |V_{blur}-V_{ref} |/ V_{ref}\). Both volumes were calculated using an Otsu threshold72. This metric is sensitive to \(d_0/L_{vx}\), as small \(d_0\) will lead to higher SEVP73.
Results and discussion
Guidelines provided by the simulation
Identification of critical values for motion blur descriptors
The simulated 3D images of a single ideal sphere (\(d_0^*=4\)) when subjected to a series of motion blurs (\(\beta _1\), \(\beta _2\)) are illustrated in Fig. 5a. The reconstructed slices obviously show a loss of image quality when increasing the motion blur descriptors, compared to the case predicted under static conditions, i.e., with \({\beta }_1 = {\beta }_2 = 0\). To better quantify this, Fig. 5b shows the evolution of PCC and SEVP with (\(\beta _1\), \(\beta _2\)). Several trends are highlighted:
-
Whatever the index, for \(\beta _i\) \(\le\) 3 px, the two maps reported in Fig. 5b exhibit a near-plateau area where the increase of (\(\beta _1\), \(\beta _2\)) seems to have a limited effect on the quality degradation (see the lightest yellow area in the PCC map, and the darkest blue area in the SEVP one). For larger values of \(\beta _i\), the PCC (resp. SEVP) sharply decreases (resp. increases). The decrease in PCC is related to a loss of global spatial correlation due to the expansion of the blur-affected background regions, while the growth of SEVP is the result of a systematic overestimation of the particle volume as the motion artefacts change it from an ideal sphere to an oblong ellipse. Note that by definition, \({\beta }_2\) induces a random aspect to the spread of projections over a motion interval (see Figs. 1d, 3). This, combined with the 0.5 px sampling step of the (\(\beta _1\), \(\beta _2\)) plane, could explain the observed fluctuations of the PCC and SEVP indices around their global trends.
-
Besides, comparing the impact of one motion blur parameter versus the other on image degradation (i.e., \(\beta _1\) vs. \(\beta _2\)), proves that there is no straightforward clue that one blur descriptor should be restricted more than the other.
-
In addition, the errors induced after segmentation (SEVP) are much higher than those reported by accounting for the whole information of the greyscale native image (PCC). Typically, for the most blurred reconstruction obtained with (\(\beta _1\), \(\beta _2\)) = (10 px, 10 px), a decay of 40% is predicted for the PCC, whereas an error of about 250% is reached for the SEVP. Such errors are exacerbated by the small value chosen for \(d_0\) and the choice of the threshold method such as Otsu’s one72.

(a) Vertical slices of 3D images of a sphere (\(d_0^*=4\)) obtained by tomography simulation, and artificially blurred to mimic various levels of motion artefacts \({\beta }_1\) and \({\beta }_2\). The orange box denotes the static reconstructed sphere (\({\beta }_1 = {\beta }_2 = 0\)). Detailed view of the slices are given extreme couples (\({\beta }_1 = {\beta }_2 = 0\)), (\({\beta }_1 = 10\) px,\(~{\beta }_2 = 0\)), (\({\beta }_1 = 0,~{\beta }_2 = 10\) px), (\({\beta }_1 = {\beta }_2 = 10\) px). (b) (top) 3D surface plot of the PCC computed between each blurred simulation and the static one. (bottom) Idem for the SEVP with switched axis for better illustration.
Similar results were obtained by simulating 3D images of a vibrating fibre-like phantom (\(d_0^*=2\), \(l_0^*=50\)), albeit with even greater error levels (\(\approx\) 80\(\%\) for the PCC, and 600\(\%\) for the SEVP for (\(\beta _1\), \(\beta _2\)) = (10 px, 10 px); Supplementary Fig. S1), as expected for particles of smallest diameter73.
From this particle-scaled numerical database, critical values of motion blur descriptors not to be exceeded for an experimental design, denoted (\(\beta _1^*\), \(\beta _2^*\)), can then be defined by thresholding the above image quality metrics (PCC and/or SEVP). More specifically, by setting these \(\beta _1^*\) and \(\beta _2^*\) values when preparing an experimental protocol, a certain level of quality indices should be expected for the acquired 4D dataset – and this, for all phases of the prescribed sinusoidal motion. For instance, Supplementary Fig. S1-c shows threshold values chosen (arbitrarily) so that the errors generated by motion artefacts do not exceed PCC \(\approx\) 0.85 and SEVP \(\approx\) 50% (red areas): this would lead to fix the critical descriptors around \(\beta _1^*\approx \beta _2^*\approx 5\) px in the case of spherical particles (\(\beta _1^*\approx \beta _2^*\approx 2\) px in the case of fibrous particles; Supplementary Fig. S1-b). Knowing this, it is possible to determine a peak-to-peak oscillation amplitude \(A^*\) that should not be exceeded during the experiment (Fig. 1d).
Determination of the optimised sampling rate
Following the aforementioned guidelines, the optimised projection sampling rate, \(f_s^*\), can also be determined for each specific configuration under study. Figure 6 displays all optimised values \(f_s^*\) predicted in the plane (\(t_e+t_l\), N) when \(f_0 = ~\)100 Hz (Eq. 1) – note that equivalent graphs for \(f_0=50\) Hz and \(f_0=400\) Hz are given in Supplementary Fig. S2. It is shown that the same frequency \(f_s^*\) can be suitable for different triplets of parameters (\(t_e\), \(t_l\), N). More particularly, the case (\(t_e\approx 0.8\) ms, \(t_l\approx 0\) ms, N = 30), which was further selected for experiments C1, C2 and C3 (Table 1), yields to \(f_s^*\approx\) 1,033 Hz, as pointed out in Fig. 6 (see black cross). Note that such a configuration requires at least \(i=3\) oscillation periods to acquire \(N = 30\) consecutive projections, and corresponds to case III in Fig. 2.

Optimised projection sampling rate \(f_s^*\) according to the number of phases N and to the minimum time between consecutive exposures \(t_l\) (typically close to \(t_e\)). Represented values correspond to case I if applicable or to case III otherwise (Fig. 2a), for \(f_0=100\) Hz. White lines depict boundaries of iso-i regions, and the black cross highlights the value of \(f_s^*/f_0\) for the presented experimental cases Ci.
Experimental validation
General experimental trends
Figure 7 shows typical 2D slices of the composite reinforced with spherical glass beads, scanned under reference static conditions (panel a), tracked over \(N=\) 30 phases of its 100 Hz-vibration after gated-CT reconstruction (panel b), along with the quantitative analyses of the recorded 4D dataset (graphs c–e). An animation of the reconstructed slices over time is also available in Supplementary Video “C2_Sphere_100Hz_MR.gif”. Results are here illustrated for case C2 (Table 1), characterised by intermediate kinematics and motion blurs, i.e., with \(A^*\) \(\approx\) 24 px and (\(\beta _1^*\), \(\beta _2^*\)) \(\approx\) (6 px, 2.5 px). Similar results are shown in Supplementary Figs. S3 and S4 for cases C1 (amplitude \(A^*\) divided by half compared to C2) and C3 (\(A^*\) increased by a factor of \(\approx\) 1.5), respectively. Whatever the case, we were able to acquire, reconstruct and process the 30 phases of the sample’s motion. Several general trends can be highlighted, as detailed below.

Example of typical optimised result for case study C2. (a) Vertical slice of the static reference. (b) 10 out of 30 vertical slices of the vibrating sample, and corresponding polar histograms of the angular sampling of projections (bin width = \(1^{\circ }\)). The supplementary Video “C2_Sphere_100Hz_MR.gif” provides a dynamic version of the vertical slices. (c) Plots of the measured 3D translation using rigid registration. Black arrows denote maximum slopes of the sinusoidal motion. d. Image quality metrics between the static reference and each of the 30 registered phases. Grey boxes depict phases with minimal image quality. (e) Barplot of the number of projections per phase n.
Angular sampling of projections—One of the main objectives of the optimisation procedure was to ensure a uniform angular distribution of projections for 3D dataset. The barplot of the actual number of projections per phase, reported in Fig. 7e, shows that this number varies little along the 30 phases, staying close to the initial target of \(n \approx 330\). This first result evidences that a reasonable phase sampling was achieved. In addition, the polar histograms displayed in Fig. 7b provide an overview of the projection space. They confirm that the angular distribution of the projections for each phase remains almost uniform with minor clustering74 as expected by the use of case III in Fig. 2. These results validate the proposed guideline.
Sample motion—The rigid translations in each direction estimated from the registration (see “Methods” section Quality of the 3D images) are plotted in Fig. 7c, relative to the phase number. Although a small shift of few micrometers can be noticed in the x and y axis direction due to the mechanical backlash of the system, most of the translation is measured along the z axis as a sine wave-like profile in agreement with the imposed excitation motion.
Image quality—The different CT-scans quality indices (PCC and SEVP) are presented in Fig. 7d for case C2, and in Supplementary Figs. S3-d and S4-d for cases (C1, C3). The detailed mean and extreme values of the indices are reported in Table 2 for each case.
Whether for PCC or SEVP, the poorest image quality is obtained when the translation speed approaches \(v_{max}\) (see shaded areas), thus when \(A^*\), \({\beta }_1^*\) and \({\beta }_2^*\) are maximum, as shown by PCC (resp. SEVP) going from 0.84 to 0.67 (resp. 0.41 to 0.91) in average when \(A^*\) is tripled. Nakamura et al.51 measured similar trends with a larger spherical phantom (\(d_0^*=16\)), correlating volumetric error to the phantom maximum velocity.

(Top) Vertical slices of registered volumes at maximum motion speed for each case studies. Orange outlines denote the boundaries of the ROI for PCC and SEVP computations. (Bottom) Boxplots of the result of image quality metrics between the static reference and each of the 30 registered phases for the three case studies, as a function of the blur descriptors. Crosses show the value for the specific phase that happened at the maximum speed, for which the blur descriptors are defined. The points denote the interpolated results of the tomography simulation for these specific couples \(\beta _1\), \(\beta _2\).
For all case studies, Fig. 8 summarises the evolution of the two quality indices measured over the 30 phases of the sinusoidal translation, by means of box plots highlighting the statistical values detailed in Table 2. The degradation of the metrics along with the increase of blur descriptors is clearly observed, which are, by definition, relative to the phase with maximum motion speed (see crosses). Besides, the maximum values of PCC (respectively the minimum ones of SEVP), which correspond to oscillation phase with minimal motion speed, stay almost constant along the three case studies (i.e., max PCC \(\approx\) 0.88). This observation suggests that the motion blur is presumably the main cause of image quality degradation. However, other sources could also enhance this gap: the registration uncertainties, the angular distribution of the projections which is not as perfect as for the static reference (Fig. 7b), and the inherent random electronic noise.
Comparison between experimental data and numerical predictions
Figure 8 also presents the comparison between experimental results and numerical predictions of the image quality indices PCC and SEVP, as derived from particle-scale simulations (Fig. 5). In both approaches, the size of spherical heterogeneities were deliberately kept in the same range (\(d_0^*\approx 4\)) to allow suitable comparison.
Experimental and numerical data follow interestingly the same qualitative trends over the 30 phases. From a quantitative point of view, despite a reasonable agreement overall, the simulations overestimate image quality for almost all the screened couples (\({\beta }_1^*\), \({\beta }_2^*\)). The uncertainty factors mentioned in the previous section could explain such a discrepancy, notably the measurement noise linked to the acquisition and which has not been simulated.
In addition, with regards to SEVP, image degradation increases more rapidly with blur according to numerical predictions than experimentally. The fact that the contrast ratio between particles and background is about three times higher in the phantom than in real gated-CT’s ROI may partly explain these differences. Choosing a lower contrast between particles and image background in the phantom would have led to a rapid combination of grey levels with the blur. In this case, the histogram-based segmentation would have been more ambiguous, and the derived volume of heterogeneities less overestimated.
In summary, despite all assumptions, for bead-reinforced composites with moderate vibrating amplitudes (up to \(\approx ~250~\upmu \hbox {m}\)) and frequencies (up to 100 Hz), the proposed modeling gives relevant guidelines to predict how much the motion blur affects the final image quality of most critical phases, and to select suitable acquisition parameters.
Performances of the optimisation guidelines
The performances of the optimisation guidelines detailed above and validated for a limited set of kinematical, geometrical and X-ray scanning parameters (cases Ci, \(i = \{1,2,3\}\)) were further assessed for wider configurations. In particular, a selection of three other cases pushing each set of parameters towards extreme values is illustrated in Supplementary Fig. S5 (see Supplementary Methods for technical details), showing the versatility of the measurement strategy and optimisation procedure:
-
the case of a higher oscillation frequency (\(f_0=400\) Hz), which required optimal values \(A^*\approx 9\) px (\(\approx 86~\upmu \hbox {m}\) with unchanged pixel size), \(\beta _1^*\approx 2\) px, \(\beta _2^*\approx 1\) px, \(f_s^*\approx\) 4,133 Hz (see Supplementary Video “Sphere_400Hz_MR.gif”);
-
the case of other heterogeneous media owning a structural anisotropy (fibrous particles), which required optimal values \(A^*\approx 30\) px (\(\approx 287~\upmu \hbox {m}\) with unchanged pixel size), \(\beta _1^*\approx 7.5\) px, \(\beta _2^*\approx 3\) px, \(f_s^*\approx\)1,033 Hz (see Supplementary Video “Fibre_100Hz_MR.gif”);
-
the case of higher magnification (\(L_{vx}=2.17~\upmu \hbox {m}\)) with optimal values \(A^*\approx 105\) px (\(\approx 228~\upmu \hbox {m}\)), \(\beta _1^*\approx 5\) px, \(\beta _2^*\approx 11\) px, \(f_s^*\approx\) 3,000 Hz (see Supplementary Video “Sphere_100Hz_HR.gif”).

Spatiotemporal resolution expressed as pixel size versus phase width for state of the art CT applied to the imaging of periodic systems. The current limit for conventional time-resolved X-ray tomography was proposed by García-Moreno et al.19. Boundaries for laboratory and clinical-CT were approximated from the latter trend. The database on which this figure is based is available in Supplementary Table S1. (1) Drangova et al.28, (2) Guo et al.32, (3) Murrie et al.33, (4) Schuler et al.40, (5) Dubsky et al.46, (6) Walker et al.38, (7) Mokso et al.21, (8) Hoshino et al.47, (9) Hoshino et al.75, (10) Tekawade et al.49, (11) Wu et al.42, (12) Fardin et al.29, (13) Maiditsch et al.4, (14) Matsubara et al.48, (15) Dejea et al.3, (16) Schmeltz et al.5.
The methodology was successfully applied to all cases, enabling the efficient reconstruction of 4D images of fast vibrating structures with controlled and limited blur artefacts, i.e., an essential step for future multi-scale quantitative analyses57. However, several limitations were observed for most extreme cases. To achieve the case at \(f_0=400\) Hz, the exposure time was first reduced by a factor of 4 (\(t_e~\approx\) 0.2 ms) so as to maintain a blur motion \(\beta _1^*\)-level (and therefore, a vibratory amplitude \(A^*\)) nearly constant compared to previous cases Ci at \(f_0=100\) Hz (see Supplementary Fig. S2 in case \(f_0\) = 400 Hz). However, given the lower vibration amplitudes allowed by the electromechanical shaker at \(f_0=400\) Hz, we were forced to reduce \(A^*\) even further in this case (by a few pixels), thus reaching the upper limit possible. Besides, this configuration brought us close to the capacity limits of the detector used in this study. In practice, if the method were to be extended to even higher oscillation frequencies, the use of a detector allowing shorter exposure times would be recommended44,76. At highest magnification, the X-ray flux was increased almost by an order of magnitude, inducing obvious material damage after a few scans on the same composite. For such cases, the use of dose-attenuation equipment, such as synchronised rotating X-ray shutter42,48, could be evaluated if the methodology leads to relatively long latency time \(t_l^{*}\) between projections. Future optical and detector systems that can better convert photons into signal will also be helpful in reducing the dose. Overall, these results obtained with relatively simple microstructured soft composites are transferable to materials with a more complex structure such as biological tissues.
Finally, Fig. 9 displays a range of reference studies conducted to image structures and systems likely to evolve periodically over time using microtomography, accounting for various X-ray sources (medical, laboratory or synchrotron) and scanning strategies (prospective gating, retrospective gating or no gating). Each study can be characterised by its spatiotemporal resolution, based on the prescribed pixel size of the acquisition, and the achieved temporal resolution (or equivalent scan rate). It is important to keep in mind that this map does not display the velocity of the captured motion, nor the sensitivity of the sample to the radiation dose, the degree of quantitativeness of the resulting 4D images or the achieved FOV. However, it gives meaningful insights for the current limits of gated-CT for periodic or quasi-periodic motions. In particular, the areas that are currently accessible using conventional equipment and/or conventional time-resolved X-ray tomography are highlighted. Hence, Fig. 9 shows that the present measurement strategy has made it possible to image a multiscale oscillator in a simple rigid body motion, but reaching the spatiotemporal limits currently acquired by gated-CT, with equivalent scan rates from 3000 up to 12,000 tomographies per second. Our approach now offers a validated method for optimising the acquisition of 4D images of fast-oscillating structures scanned in this high-performance region in terms of spatiotemporal resolution (see red region in Fig. 9), and for predicting their quality using quantitative metrics. By providing a solid basis for imaging heterogeneous 3D structures oscillating at high frequency during simple, controlled translation, this work paves the way for a wide range of research aimed at characterising the 3D deformations of more complex vibrators.
Conclusion
The general objective of this work was to improve the acquisition and reconstruction procedures of retrospectively gated X-ray CT in order to image and study the 3D motion of structures oscillating at high frequencies. More specifically, our approach aimed to minimise streaking and blurring artefacts typically obtained when imaging a moving structure. To this end, numerical guidelines are provided for optimising the acquisition parameters, by predicting on the one hand the conditions for quasi-regular angular sampling of projections with minor clustering, and on the other hand the level of image quality degradation as a function of two main types of motion blur. It is shown that these conditions highly depend on the triplet formed by the vibrating-structure mean frequency, the beam exposure time per projection, and the number of temporal phases to be reconstructed in order to obtain a discrete sequence of oscillation cycle. The guidelines were validated experimentally by a series of synchrotron experiments, which made it possible to image rigid-body motions of elastomers reinforced with microparticles while vibrating at 100 Hz up to 400 Hz, achieving an equivalent rate of 3000 up to 12,000 tomographies per second with controlled and limited blurring artefacts.
This work opens the way to a number of methodological perspectives and research applications. Image quality can be improved by coupling the technique to reconstruction algorithms using deep learning assisted methods77,78,79. The proposed methodology can be extended to lab microtomography with cone beam X-ray sources, although the achievable spatiotemporal resolution decreases by several orders of magnitude in this case (due to a typical projection sampling rate of the order of a few tens of Hz at most, depending on the configuration)33,40. These developments can be combined with kinematic field measurements to further characterize the 3D deformation of microstructured oscillators48,57.
Data availability
The datasets generated and/or analysed during the current study are available from the corresponding author upon request.
References
Ford, N. L. et al. Prospective respiratory-gated micro-CT of free breathing rodents. Med. Phys. 32, 2888–2898. https://doi.org/10.1118/1.2013007 (2005).
Lovric, G. et al. Tomographic in vivo microscopy for the study of lung physiology at the alveolar level. Sci. Rep. 7, 12545. https://doi.org/10.1038/s41598-017-12886-3 (2017).
Dejea, H. et al. A tomographic microscopy-compatible Langendorff system for the dynamic structural characterization of the cardiac cycle. Front. Cardiovasc. Med. 9, 1023483. https://doi.org/10.3389/fcvm.2022.1023483 (2022).
Maiditsch, I. P., Ladich, F., Heß, M., Schlepütz, C. M. & Schulz-Mirbach, T. Revealing sound-induced motion patterns in fish hearing structures in 4D: A standing wave tube-like setup designed for high-resolution time-resolved tomography. J. Exp. Biol. 225, jeb243614. https://doi.org/10.1242/jeb.243614 (2022).
Schmeltz, M. et al. The human middle ear in motion: 3D visualization and quantification using dynamic synchrotron-based X-ray imaging. Commun. Biol. 7, 157. https://doi.org/10.1038/s42003-023-05738-6 (2024).
Titze, I. R. Principles of voice production 2nd edn. (National Center for Voice and Speech, 2000).
Luizard, P. et al. Flow-induced oscillations of vocal-fold replicas with tuned extensibility and material properties. Sci. Rep. 13, 22658. https://doi.org/10.1038/s41598-023-48080-x (2023).
Timcke, R. Die Synchron-Stroboskopie von menschlichen Stimmlippen bzw. ähnlichen Schallquellen und Messung der Offnungszeit [Synchronous stroboscopy of the vocal cords in man and analogous sources of sound and the duration of opening]. Laryngol. Rhinol. Otol. 35, 331–5 (1956).
Švec, J. G. & Schutte, H. K. Videokymography: High-speed line scanning of vocal fold vibration. J. Voice 10, 201–205. https://doi.org/10.1016/S0892-1997(96)80047-6 (1996).
Schutte, H. K., Svec, J. G. & Sram, F. First results of clinical application of videokymography. Laryngoscope 108, 1206–10. https://doi.org/10.1097/00005537-199808000-00020 (1998).
Deliyski, D. D. & Hillman, R. E. State of the art laryngeal imaging: Research and clinical implications. Curr. Opin. Otolaryngol. Head Neck Surg. 18, 147–152. https://doi.org/10.1097/MOO.0b013e3283395dd4 (2010).
Baken, R. & Orlikoff, R. F. Clinical measurement of speech and voice (Singular, 2000).
Ziethe, A., Patel, R., Kunduk, M., Eysholdt, U. & Graf, S. Clinical analysis methods of voice disorders. Curr. Bioinform. 6, 270–285. https://doi.org/10.2174/157489311796904682 (2011).
Andrade-Miranda, G., Stylianou, Y., Deliyski, D. D., Godino-Llorente, J. I. & Henrich Bernardoni, N. Laryngeal image processing of vocal folds motion. Appl. Sci. 10, 1556. https://doi.org/10.3390/app10051556 (2020).
Bailly, L. et al. 3D multiscale imaging of human vocal folds using synchrotron X-ray microtomography in phase retrieval mode. Sci. Rep. 8, 14003. https://doi.org/10.1038/s41598-018-31849-w (2018).
Olbinado, M. P., Vagovič, P., Yashiro, W. & Momose, A. Demonstration of stroboscopic X-ray talbot interferometry using polychromatic synchrotron and laboratory X-ray sources. Appl. Phys. Express 6, 096601. https://doi.org/10.7567/APEX.6.096601 (2013).
Schulz-Mirbach, T. et al. In-situ visualization of sound-induced otolith motion using hard X-ray phase contrast imaging. Sci. Rep. 8, 3121. https://doi.org/10.1038/s41598-018-21367-0 (2018).
Schulz-Mirbach, T. et al. Auditory chain reaction: Effects of sound pressure and particle motion on auditory structures in fishes. PLoS ONE 15, e0230578. https://doi.org/10.1371/journal.pone.0230578 (2020).
García-Moreno, F. et al. Tomoscopy: Time-resolved tomography for dynamic processes in materials. Adv. Mater. 33, 2104659. https://doi.org/10.1002/adma.202104659 (2021).
dos Santos Rolo, T., Ershov, A., van de Kamp, T. & Baumbach, T. In vivo X-ray cine-tomography for tracking morphological dynamics. Proc. Natl. Acad. Sci. 111, 3921–3926. https://doi.org/10.1073/pnas.1308650111 (2014).
Mokso, R. et al. Four-dimensional in vivo X-ray microscopy with projection-guided gating. Sci. Rep. 5, 8727. https://doi.org/10.1038/srep08727 (2015).
Maire, E., Le Bourlot, C., Adrien, J., Mortensen, A. & Mokso, R. 20 Hz X-ray tomography during an in situ tensile test. Int. J. Fract. 200, 3–12. https://doi.org/10.1007/s10704-016-0077-y (2016).
Laurencin, T. et al. 3D real-time and in situ characterisation of fibre kinematics in dilute non-Newtonian fibre suspensions during confined and lubricated compression flow. Compos. Sci. Technol. 134, 258–266. https://doi.org/10.1016/j.compscitech.2016.09.004 (2016).
Ferré Sentis, D. et al. 3D in situ observations of the compressibility and pore transport in Sheet Moulding Compounds during the early stages of compression moulding. Compos. A Appl. Sci. Manuf. 92, 51–61. https://doi.org/10.1016/j.compositesa.2016.10.031 (2017).
Laurencin, T. et al. 3D real time and in situ observation of the fibre orientation during the plane strain flow of concentrated fibre suspensions. J. Nonnewton. Fluid Mech. 312, 104978. https://doi.org/10.1016/j.jnnfm.2022.104978 (2023).
Amedewovo, L. et al. Deconsolidation of carbon fiber-reinforced PEKK laminates: 3D real-time in situ observation with synchrotron X-ray microtomography. Compos. A Appl. Sci. Manuf. 177, 107917. https://doi.org/10.1016/j.compositesa.2023.107917 (2024).
Keall, P. J., Kini, V. R., Vedam, S. S. & Mohan, R. Potential radiotherapy improvements with respiratory gating. Australas. Phys. Eng. Sci. Med. 25, 1–6. https://doi.org/10.1007/BF03178368 (2002).
Drangova, M., Ford, N. L., Detombe, S. A., Wheatley, A. R. & Holdsworth, D. W. Fast retrospectively gated quantitative four-dimensional (4D) cardiac micro computed tomography imaging of free-breathing mice. Invest. Radiol. 42, 85–94. https://doi.org/10.1097/01.rli.0000251572.56139.a3 (2007).
Fardin, L. et al. Imaging atelectrauma in ventilator-induced lung injury using 4D X-ray microscopy. Sci. Rep. 11, 4236. https://doi.org/10.1038/s41598-020-77300-x (2021).
Badea, C., Hedlund, L. W. & Johnson, G. A. Micro-CT with respiratory and cardiac gating: Micro-CT with respiratory and cardiac gating. Med. Phys. 31, 3324–3329. https://doi.org/10.1118/1.1812604 (2004).
Badea, C. T., Fubara, B., Hedlund, L. W. & Johnson, G. A. 4-D micro-CT of the mouse heart. Mol. Imaging 4, 153535002005041. https://doi.org/10.1162/15353500200504187 (2005).
Guo, X., Johnston, S. M., Qi, Y., Johnson, G. A. & Badea, C. T. 4D micro-CT using fast prospective gating. Phys. Med. Biol. 57, 257–271. https://doi.org/10.1088/0031-9155/57/1/257 (2012).
Murrie, R. P. et al. Real-time in vivo imaging of regional lung function in a mouse model of cystic fibrosis on a laboratory X-ray source. Sci. Rep. 10, 447. https://doi.org/10.1038/s41598-019-57376-w (2020).
Manzke, R., Köhler, Th., Nielsen, T., Hawkes, D. & Grass, M. Automatic phase determination for retrospectively gated cardiac CT: Automatic phase determination for retrospectively gated cardiac CT. Med. Phys. 31, 3345–3362. https://doi.org/10.1118/1.1791351 (2004).
Hu, J., Haworth, S. T., Molthen, R. C. & Dawson, C. A. Dynamic small animal lung imaging via a postacquisition respiratory gating technique using micro-cone beam computed tomography1. Acad. Radiol. 11, 961–970. https://doi.org/10.1016/j.acra.2004.05.019 (2004).
Sonke, J.-J., Zijp, L., Remeijer, P. & van Herk, M. Respiratory correlated cone beam CT: Respiratory correlated cone beam CT. Med. Phys. 32, 1176–1186. https://doi.org/10.1118/1.1869074 (2005).
Ford, N. L., Wheatley, A. R., Holdsworth, D. W. & Drangova, M. Optimization of a retrospective technique for respiratory-gated high speed micro-CT of free-breathing rodents. Phys. Med. Biol. 52, 5749–5769. https://doi.org/10.1088/0031-9155/52/19/002 (2007).
Walker, S. M. et al. In vivo time-resolved microtomography reveals the mechanics of the blowfly flight motor. PLoS Biol. 12, e1001823. https://doi.org/10.1371/journal.pbio.1001823 (2014).
Fardin, L. In-vivo dynamic 3D phase-contrast microscopy: A novel tool to investigate the mechanisms of ventilator induced lung injury. Ph.D. thesis, Université Grenoble Alpes (2019).
Schuler, J., Neuendorf, L. M., Petersen, K. & Kockmann, N. Micro-computed tomography for the 3D time-resolved investigation of monodisperse droplet generation in a co-flow setup. AIChE J.https://doi.org/10.1002/aic.17111 (2021).
Paganin, D., Mayo, S. C., Gureyev, T. E., Miller, P. R. & Wilkins, S. W. Simultaneous phase and amplitude extraction from a single defocused image of a homogeneous object. J. Microsc. 206, 33–40. https://doi.org/10.1046/j.1365-2818.2002.01010.x (2002).
Wu, Y., Takano, H. & Momose, A. Time-resolved x-ray stroboscopic phase tomography using Talbot interferometer for dynamic deformation measurements. Rev. Sci. Instrum. 92, 043702. https://doi.org/10.1063/5.0030811 (2021).
Lovric, G., Mokso, R., Schlepütz, C. M. & Stampanoni, M. A multi-purpose imaging endstation for high-resolution micrometer-scaled sub-second tomography. Physica Med. 32, 1771–1778. https://doi.org/10.1016/j.ejmp.2016.08.012 (2016).
Mokso, R. et al. GigaFRoST: The gigabit fast readout system for tomography. J. Synchrotron Radiat. 24, 1250–1259. https://doi.org/10.1107/S1600577517013522 (2017).
Maire, E. & Withers, P. J. Quantitative X-ray tomography. Int. Mater. Rev. 59, 1–43. https://doi.org/10.1179/1743280413Y.0000000023 (2014).
Dubsky, S., Hooper, S. B., Siu, K. K. W. & Fouras, A. Synchrotron-based dynamic computed tomography of tissue motion for regional lung function measurement. J. R. Soc. Interface 9, 2213–2224. https://doi.org/10.1098/rsif.2012.0116 (2012).
Hoshino, M., Uesugi, K. & Yagi, N. 4D x-ray phase contrast tomography for repeatable motion of biological samples. Rev. Sci. Instrum. 87, 093705. https://doi.org/10.1063/1.4962405 (2016).
Matsubara, M. et al. Dynamic observation of a damping material using micro X-ray computed tomography coupled with a phase-locked loop. Polym. Test.https://doi.org/10.1016/j.polymertesting.2022.107810 (2022).
Tekawade, A. et al. Time-resolved 3D imaging of two-phase fluid flow inside a steel fuel injector using synchrotron X-ray tomography. Sci. Rep. 10, 8674. https://doi.org/10.1038/s41598-020-65701-x (2020).
Herrmann, J., Hoffman, E. A. & Kaczka, D. W. Frequency-selective computed tomography: Applications during periodic thoracic motion. IEEE Trans. Med. Imaging 36, 1722–1732. https://doi.org/10.1109/TMI.2017.2694887 (2017).
Nakamura, M. et al. Impact of motion velocity on four-dimensional target volumes: A phantom study: Impact of motion velocity on 4D target volumes. Med. Phys. 36, 1610–1617. https://doi.org/10.1118/1.3110073 (2009).
Li, T. et al. Four-dimensional cone-beam computed tomography using an on-board imager. Med. Phys. 33, 3825–3833. https://doi.org/10.1118/1.2349692 (2006).
Yamamoto, T., Langner, U., Loo, B. W., Shen, J. & Keall, P. J. Retrospective analysis of artifacts in four-dimensional CT images of 50 abdominal and thoracic radiotherapy patients. Int. J. Radiat. Oncol. Biol. Phys. 72, 1250–1258. https://doi.org/10.1016/j.ijrobp.2008.06.1937 (2008).
Rueckel, J., Stockmar, M., Pfeiffer, F. & Herzen, J. Spatial resolution characterization of a X-ray microCT system. Appl. Radiat. Isot. 94, 230–234. https://doi.org/10.1016/j.apradiso.2014.08.014 (2014).
McCullough, E. C. et al. Performance evaluation and quality assurance of computed tomography scanners, with illustrations from the EMI, ACTA, and delta scanners. Radiology 120, 173–188. https://doi.org/10.1148/120.1.173 (1976).
García-Moreno, F. et al. Using X-ray tomoscopy to explore the dynamics of foaming metal. Nat. Commun. 10, 3762. https://doi.org/10.1038/s41467-019-11521-1 (2019).
Stamati, O. et al. Spam: Software for practical analysis of materials. J. Open Source Softw. 5, 2286. https://doi.org/10.21105/joss.02286 (2020).
Stamati, O. et al. Advanced analysis of the bias-extension of woven fabrics with X-ray microtomography and Digital Volume Correlation. Compos. A Appl. Sci. Manuf. 175, 107748. https://doi.org/10.1016/j.compositesa.2023.107748 (2023).
Barrett, J. F. & Keat, N. Artifacts in CT: Recognition and avoidance. Radiographics 24, 1679–1691. https://doi.org/10.1148/rg.246045065 (2004).
Depriester, D. et al. Individual fibre separation in 3D fibrous materials imaged by X-ray tomography. J. Microsc. 286, 220–239. https://doi.org/10.1111/jmi.13096 (2022).
O’Brien, R. T., Cooper, B. J. & Keall, P. J. Optimizing 4D cone beam computed tomography acquisition by varying the gantry velocity and projection time interval. Phys. Med. Biol. 58, 1705–1723. https://doi.org/10.1088/0031-9155/58/6/1705 (2013).
Park, J. C. et al. Four dimensional digital tomosynthesis using on-board imager for the verification of respiratory motion. PLoS ONE 9, e115795. https://doi.org/10.1371/journal.pone.0115795 (2014).
Withers, P. J. et al. X-ray computed tomography. Nat. Rev. Methods Primers 1, 18. https://doi.org/10.1038/s43586-021-00015-4 (2021).
Tengattini, A. & Andò, E. Kalisphera: An analytical tool to reproduce the partial volume effect of spheres imaged in 3D. Meas. Sci. Technol. 26, 095606. https://doi.org/10.1088/0957-0233/26/9/095606 (2015).
Palenstijn, W., Batenburg, K. & Sijbers, J. Performance improvements for iterative electron tomography reconstruction using graphics processing units (GPUs). J. Struct. Biol. 176, 250–253. https://doi.org/10.1016/j.jsb.2011.07.017 (2011).
van Aarle, W. et al. The ASTRA Toolbox: A platform for advanced algorithm development in electron tomography. Ultramicroscopy 157, 35–47. https://doi.org/10.1016/j.ultramic.2015.05.002 (2015).
van Aarle, W. et al. Fast and flexible X-ray tomography using the ASTRA toolbox. Opt. Express 24, 25129. https://doi.org/10.1364/OE.24.025129 (2016).
King, A. et al. Tomography and imaging at the PSICHE beam line of the SOLEIL synchrotron. Rev. Sci. Instrum. 87, 093704. https://doi.org/10.1063/1.4961365 (2016).
King, A. et al. Recent tomographic imaging developments at the PSICHE beamline. Integrating Mater. Manuf. Innov. 8, 551–558. https://doi.org/10.1007/s40192-019-00155-2 (2019).
Mirone, A., Brun, E., Gouillart, E., Tafforeau, P. & Kieffer, J. The PyHST2 hybrid distributed code for high speed tomographic reconstruction with iterative reconstruction and a priori knowledge capabilities. Nucl. Instrum. Methods Phys. Res. Sect. B 324, 41–48. https://doi.org/10.1016/j.nimb.2013.09.030 (2014).
Rodgers, J. L. & Nicewander, W. A. Thirteen ways to look at the correlation coefficient. Am. Stat. 42, 59. https://doi.org/10.2307/2685263 (1988) arXiv:2685263.
Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 9, 62–66. https://doi.org/10.1109/TSMC.1979.4310076 (1979).
Rietzel, E., Pan, T. & Chen, G. T. Y. Four-dimensional computed tomography: Image formation and clinical protocol: 4D computed tomography. Med. Phys. 32, 874–889. https://doi.org/10.1118/1.1869852 (2005).
Cooper, B. J., O’Brien, R. T., Balik, S., Hugo, G. D. & Keall, P. J. Respiratory triggered 4D cone-beam computed tomography: A novel method to reduce imaging dose: RT 4DCBCT: A novel method reducing imaging dose. Med. Phys. 40, 041901. https://doi.org/10.1118/1.4793724 (2013).
Hoshino, M., Uesugi, K., Yagi, N. & Tsukube, T. Improvement of scanning procedure for 4D-X-ray phase tomography. Microscopy and Microanalysis. 24(S2), 130–131. https://doi.org/10.1017/S1431927618013041 (2018).
Pfaff, J. et al. In Situ chamber for studying battery failure using high-speed synchrotron radiography. J. Synchrotron Radiat. 30, 192–199. https://doi.org/10.1107/S1600577522010244 (2023).
Pelt, D., Batenburg, K. & Sethian, J. Improving tomographic reconstruction from limited data using mixed-scale dense convolutional neural networks. J. Imaging 4, 128. https://doi.org/10.3390/jimaging4110128 (2018).
Hendriksen, A. A., Pelt, D. M. & Batenburg, K. J. Noise2Inverse: Self-supervised deep convolutional denoising for tomography. IEEE Trans. Comput. Imaging 6, 1320–1335. https://doi.org/10.1109/TCI.2020.3019647 (2020).
Liu, Z. et al. TomoGAN: Low-dose synchrotron x-ray tomography with generative adversarial networks: Discussion. J. Opt. Soc. Am. A 37, 422. https://doi.org/10.1364/JOSAA.375595 (2020).
Acknowledgements
We acknowledge SOLEIL (PSICHE beamline, proposal \(\hbox {n}^{\circ }\)20210430) and ESRF (ID19 beamline, proposal MA-5278) for provision of synchrotron radiation facilities, and for their scientific and financial support to develop the methodology. The ANATOMIX beamline (SOLEIL) is acknowledged for the loan of the PCO camera used for this study. Alexander Rack is acknowledged for the access to the ID19 beamline (ESRF) for preliminary tests. This work was also supported by the ANR MicroVoice (Grant No. ANR-17-CE19-0015-01). The 3SR Lab is part of the LabEx Tec 21 (Investissements d’Avenir—Grant Agreement No. ANR-11-LABX-0030) and the Carnot PolyNat Institute (Investissements d’Avenir—Grant Agreement No. ANR-16-CARN-0025-01). We also would like to thank Nicolas Lenoir (Research engineer, CNRS, 3SR Lab), Pascal Charrier (Design Engineer, Univ. Grenoble Alpes, 3SR Lab) and Xavier Laval (Design Engineer, Grenoble INP, GIPSA-lab) for their helpful assistance and expertise in instrumentation and synchrotron data collection.
Author information
Authors and Affiliations
Contributions
L.Ba., S.R.R., L.O. and N.H.B. conceptualised the research, and co-supervised the study. A.Kl. developed the theoretical framework, designed and built the experimental setup. He conducted the experiments, conceived and performed simulations, and was the main investigator for post-processing and data analysis. L.Br. and A.Ki. provided technical expertise in beamline instrumentation and data post-processing. A.Ki. configured the imaging setup and operated the synchrotron beamline. L.Br. and A.Kl. coded the post-processing of the data to make the tomographic reconstruction available on the beamline during the experiments. All authors participated in the collection of experimental data. L.Ba., S.R.R., L.O. and N.H.B. contributed to the theoretical framework, to the data analysis, and to the interpretation of results. L.Ba. directed the project and was the main investigator for funding acquisition. A.Kl. drafted the manuscript and designed the figures. All authors contributed to manuscript revision, read, and approved the submitted version.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.






Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Cite this article
Klos, A., Bailly, L., Rolland du Roscoat, S. et al. Optimising 4D imaging of fast-oscillating structures using X-ray microtomography with retrospective gating. Sci Rep 14, 20499 (2024). https://doi.org/10.1038/s41598-024-68684-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-024-68684-1
- Springer Nature Limited