
Abstract
For the purpose of this article, we introduce a new problem using the concept of equilibrium problem and prove the strong convergence theorem for finding a common element of the set of fixed points of an infinite family of -strictly pseudo contractive mappings and of a finite family of the set of solutions of equilibrium problem and variational inequalities problem. Furthermore, we utilize our main theorem for the numerical example.
Similar content being viewed by others

1 Introduction
Let C be a nonempty closed convex subset of a real Hilbert space H with the inner product and the norm . Let A be a strongly positive linear bounded operator on H if there is a constant with the property
We now recall some well-known concepts and results as follows.
Definition 1.1 Let be a mapping. Then B is called
-
(i)
monotone if
-
(ii)
υ-strongly monotone if there exists a positive real number υ such that
-
(iii)
ξ-inverse-strongly monotone if there exists a positive real number ξ such that
Definition 1.2 Let be a mapping. Then
-
(i)
an element is said to be a fixed point of T if and denotes the set of fixed points of T;
-
(ii)
a mapping T is called nonexpansive if
-
(iii)
T is said to be κ-strictly pseudo-contractive if there exists a constant such that
(1.1)
Note that the class of κ-strict pseudo-contractions strictly includes the class of nonexpansive mappings.
Fixed point problems arise in many areas such as the vibration of masses attached to strings or nets (see the book by Cheng [1]) and a network bandwidth allocation problem [2] which is one of the central issues in modern communication networks. In applications to neural networks, fixed point theorems can be used to design a dynamic neural network in order to solve steady state solutions [3]. For general information on neural networks, see the books by Robert [4] or by Haykin [5].
Let . The variational inequality problem is to find a point such that
for all . The set of solutions of the variational inequality is denoted by .
Variational inequalities were introduced and investigated by Stampacchia [6] in 1964. It is now well known that variational inequalities cover as diverse disciplines as partial differential equations, optimal control, optimization, mathematical programming, mechanics and finance; see [7–9].
Let be a bifunction. The equilibrium problem for F is to determine its equilibrium point, i.e., the set
Equilibrium problems, which were introduced by [10] in 1994, have had a great impact and influence on the development of several branches of pure and applied sciences. Numerous problems in physics, optimization and economics are related to seeking some elements of ; see [10, 11]. Many authors have studied an iterative scheme for the equilibrium problem; see, for example, [11–14].
In 2005, Combettes and Hirstoaga [11] introduced some iterative schemes for finding the best approximation to the initial data when is nonempty and proved the strong convergence theorem.
In 2007, Takahashi and Takahashi [14] proved the following theorem.
Theorem 1.1 Let C be a nonempty closed convex subset of H. Let F be a bifunction from to ℝ satisfying
-
(A1)
for all ;
-
(A2)
F is monotone, i.e., for all ;
-
(A3)
For each ,
-
(A4)
For each , is convex and lower semicontinuous;
and let S be a nonexpansive mapping of C into H such that . Let f be a contraction of H into itself, and let and be sequences generated by and
for all , where and satisfy some control conditions. Then and converge strongly to , where .
For , let be bifunctions and with . Define the mapping . The combination of equilibrium problem is to find such that
The set of solutions (1.4) is denoted by
If , , then (1.4) reduces to (1.3).
Motivated by Theorem 1.1 and (1.4), we prove the strong convergence theorem for finding a common element of the set of fixed points of an infinite family of -strictly pseudo-contractive mappings and a finite family of the set of solutions of equilibrium problem and variational inequalities problem.
2 Preliminaries
Let H be a real Hilbert space and C be a nonempty closed convex subset of H. We denote weak convergence and strong convergence by ‘⇀’ and ‘→’, respectively. In a real Hilbert space H, it is well known that
for all and .
Recall that the (nearest point) projection from H onto C assigns to each the unique point satisfying the property
The following lemmas are needed to prove the main theorem.
Lemma 2.1 [15]
For given and ,
It is well known that is a firmly nonexpansive mapping of H onto C and satisfies
Lemma 2.2 [16]
Each Hilbert space H satisfies Opial’s condition, i.e., for any sequence with , the inequality
holds for every with .
Lemma 2.3 [17]
Let be a sequence of nonnegative real numbers satisfying
where is a sequence in and is a sequence such that
-
(1)
,
-
(2)
or .
Then .
Lemma 2.4 Let H be a real Hilbert space. Then
for all .
Lemma 2.5 [15]
Let H be a Hilbert space, let C be a nonempty closed convex subset of H, and let A be a mapping of C into H. Let . Then, for ,
where is the metric projection of H onto C.
Lemma 2.6 [18]
Let C be a nonempty closed convex subset of a real Hilbert space H, and let be a self-mapping of C. If S is a κ-strictly pseudo-contractive mapping, then S satisfies the Lipschitz condition
For solving the equilibrium problem for a bifunction , let us assume that F and C satisfy the following conditions:
-
(A1)
for all ;
-
(A2)
F is monotone, i.e., for all ;
-
(A3)
For each ,
-
(A4)
For each , is convex and lower semicontinuous.
By using the concept of equilibrium problem, we have Lemma 2.7.
Lemma 2.7 Let C be a nonempty closed convex subset of a real Hilbert space H. For , let be bifunctions satisfying (A1)-(A4) with . Then
where for every and .
Proof It is easy to show that .
Let and . Then we have
and
From (2.2) and , we have
for all . From (2.3) and (A2), we obtain
Since , it follows from (2.1) that
Applying (2.5), for each , we obtain
From (2.3), (2.6) and (A2), it follows that
Inequalities (2.7) and (2.4) guarantee that
By using (2.8) and (A1), deduce that
It implies that
Therefore,
Hence, we have
□
Example 2.8 Let ℝ be the set of real numbers, and let bifunctions , , be defined by
It is easy to check that satisfy (A1)-(A4) for every and
By choosing , and , we obtain
From (2.10), we have
From (2.9) and (2.11), we obtain
Remark 2.9 By using Lemma 2.7, we can guarantee the result of Example 2.8.
Lemma 2.10 [10]
Let C be a nonempty closed convex subset of H, and let F be a bifunction of into ℝ satisfying (A1)-(A4). Let and . Then there exists such that
Lemma 2.11 [11]
Assume that satisfies (A1)-(A4). For , define a mapping as follows:
for all . Then the following hold:
-
(i)
is single-valued;
-
(ii)
is firmly nonexpansive, i.e., for any ,
-
(iii)
;
-
(iv)
is closed and convex.
Remark 2.12 From Lemma 2.7, it is easy to see that satisfies (A1)-(A4). By using Lemma 2.11, we obtain
where , for each , and .
Definition 2.1 [19]
Let C be a nonempty convex subset of a real Hilbert space. Let , , be mappings of C into itself. For each , let , where , . For every , we define the mapping as follows:
This mapping is called S-mapping generated by and .
Lemma 2.13 [19]
Let C be a nonempty closed convex subset of a real Hilbert space H. Let be -strictly pseudo-contractive mappings of C into itself with and , and let , where , , and for all . For every , let be an S-mapping generated by and . Then, for every and , exists.
For every and , Kangtunyakarn [19] defined the mapping and as follows:
and
Such a mapping S is called S-mapping generated by and .
Remark 2.14 [19]
For every , is nonexpansive and for every bounded subset D of C.
Lemma 2.15 [19]
Let C be a nonempty closed convex subset of a real Hilbert space H. Let be -strictly pseudo-contractive mappings of C into itself with and , and let , where , , and for all . For every , let and S be S-mappings generated by and and and , respectively. Then .
Lemma 2.16 Let C be a nonempty closed convex subset of a real Hilbert space H. For every , let be a strongly positive linear bounded operator on a Hilbert space H with coefficient and . Let with . Then the following properties hold:
-
(i)
and is a nonexpansive mapping for every ().
-
(ii)
.
Proof To show (i), it is obvious that is a positive linear bounded operator on H, which yields that
Since is a strongly positive operator for all , we get
which implies that is a -strongly positive operator.
Let . Then, by using (2.13), we obtain
From (2.12) and (2.14), we have
Next, we show that is a nonexpansive mapping. Let . Then, using (2.15), we obtain
Hence, is a nonexpansive mapping.
To prove (ii), it is easy to see that
Let and . Then we have
From (2.16), we have . It implies that
From (2.17), (2.18) and , we obtain
and
By summing up (2.19) and (2.20), we have
It implies that .
Then we can conclude that . Therefore
Hence, we have
□
3 Main result
Theorem 3.1 Let C be a nonempty closed convex subset of a real Hilbert space H. For , let be a bifunction satisfying (A1)-(A4), and let be a strongly positive linear bounded operator on H with coefficient and . Let be an infinite family of -strictly pseudo-contractive mappings of C into itself, and let , where and , and for all . For every , let and S be the S-mappings generated by and and and , respectively. Assume that . Let the sequences and be generated by and
where and , for every , satisfy the following conditions:
-
(i)
and ,
-
(ii)
, ,
-
(iii)
,
-
(iv)
, ,
-
(v)
,
-
(vi)
, , , and .
Then the sequences and converge strongly to .
Proof Since as , without loss of generality, we may assume that , and .
The proof will be divided into five steps.
Step 1. We will show that is bounded.
Since satisfies (A1)-(A4) and
by Lemma 2.11 and Remark 2.12, we have and .
Let . Since , by Lemma 2.5 and Lemma 2.16, we have
From Lemma 2.16 and nonexpansiveness of , we have
By induction on n, for some , we have , . It implies that is bounded and so is a bounded sequence.
Step 2. We will show that .
Putting , from the definition of , we have
By using the same method as in step 2 of Theorem 3.1 in [20], we have
Since , by utilizing the definition of , we obtain
and
From (3.4) and (3.5), it follows that
and
From (3.6) and (3.7) and the fact that satisfies (A2), we have
which implies that
It follows that
From (3.8), we obtain
which yields that
From (3.9), we have
By substituting (3.3) and (3.10) into (3.2), we obtain
where . From (3.11), conditions (i), (ii), (vi) and Lemma 2.3, we obtain
Step 3. We will show that , where .
To show this, let . Since and is a firmly nonexpansive mapping, then we obtain
which yields that
By nonexpansiveness of , (3.13) and the definition of , we have
which implies that
By (3.12), (3.14), conditions (i) and (ii), we have
Put . By the definition of and , we obtain
which yields that
By (3.12) and conditions (i) and (ii), we have
By the definition of , we obtain
By (3.18) and the definition of , we have
From (3.12), (3.15) and (3.17), we have
Since
by using (3.15) and (3.19), we have
By the definition of , we obtain
from which it follows that
From (3.12), (3.20), conditions (i) and (ii), we have
Step 4. We will show that , where .
To show this, choose a subsequence of such that
Without loss of generality, we can assume that as , where . From (3.15), we obtain as .
Assume that . Since , we have , where .
By nonexpansiveness of , (3.19) and Opial’s condition, we obtain
This is a contradiction. Then we have
Next, we will show that .
By Lemma 2.15, we have . Assume that . Using Opial’s condition, (3.21) and Remark 2.14, we obtain
This is a contradiction. Then we have
Next, we will show that .
Since
and satisfies conditions (A1)-(A4), we obtain
In particular, it follows that
From (3.15), (3.25) and (A4), we have
Put , , we have . By using (A1), (A4) and (3.26), we have
It implies that
From (3.27), taking and using (A3), we can conclude that
Therefore, . By Lemma 2.7, we obtain . It follows that
From (3.23), (3.24) and (3.28), we can deduce that .
Since and , then, by Lemma 2.1, we can conclude that
Step 5. Finally, we will show that the sequence converges strongly to .
By nonexpansiveness of and , we have
From (3.29), conditions (i), (ii) and Lemma 2.3, we can conclude that converges strongly to . By (3.15), we have converges strongly to . This completes the proof. □
4 Application
In this section, we apply our main theorem to prove strong convergence theorems involving equilibrium problem, variational inequality problem and fixed point problem.
Theorem 4.1 Let C be a nonempty closed convex subset of a real Hilbert space H. For , let be a bifunction satisfying (A1)-(A4), and let be a strongly positive linear bounded operator on H with coefficient . Let be an infinite family of -strictly pseudo-contractive mappings of C into itself, and let , where and , and for all . For every , let and S be the S-mappings generated by and and and , respectively. Assume that . Let the sequences and be generated by and
where and , for every , satisfy the following conditions:
-
(i)
and ,
-
(ii)
, ,
-
(iii)
,
-
(iv)
, ,
-
(v)
, , , and .
Then the sequences and converge strongly to .
Proof Take and , . By Theorem 3.1, we obtain the desired conclusion. □
Theorem 4.2 Let C be a nonempty closed convex subset of a real Hilbert space H. For every , let be a strongly positive linear bounded operator on H with coefficient and . Let be an infinite family of -strictly pseudo-contractive mappings of C into itself, and let , where and , and for all . For every , let and S be the S-mappings generated by and and and , respectively. Assume that . Let the sequences and be generated by and
where satisfy the following conditions:
-
(i)
and ,
-
(ii)
, ,
-
(iii)
,
-
(iv)
, ,
-
(v)
,
-
(vi)
, , , and .
Then the sequences and converge strongly to .
Proof Put , . Then we have , . Therefore the conclusion of Theorem 4.2 can be obtained from Theorem 3.1. □
Theorem 4.3 Let C be a nonempty closed convex subset of a real Hilbert space H. For , let be a bifunction satisfying (A1)-(A4). Let be an infinite family of nonexpansive mappings of C into itself, and let , where and , and for all . For every , let and S be the S-mappings generated by and and and , respectively. Assume that . Let the sequences and be generated by and
where and , for every , satisfy the following conditions:
-
(i)
and ,
-
(ii)
, ,
-
(iii)
,
-
(iv)
, ,
-
(v)
,
-
(vi)
, , , and .
Then the sequences and converge strongly to .
Proof Put , . Let , then is a nonexpansive mapping for every . The result of Theorem 4.3 can be obtained by Theorem 3.1. □
5 Example and numerical results
In this section, an example is given to support Theorem 3.1.
Example 5.1 Let ℝ be the set of real numbers, and let the mapping be defined by , and for every . For , let the mapping be defined by
and let be defined by
Furthermore, let for every . Then we have
where . It is easy to check that satisfies all the conditions of Theorem 3.1 and . Let and be the sequences generated by (3.1). By the definition of F, we have
Let . is a quadratic function of y with coefficient , , and . Determine the discriminant Δ of G as follows:
We know that , . If it has at most one solution in ℝ, then , so we obtain
For every , and , then we have is a nonexpansive mapping. It implies that T is 0-strictly pseudo-contractive for every . For every , let , , . Then for all . Since is an S-mapping generated by and , we obtain
From the definition of , we obtain
From (5.2) and the definitions of and , we have
Put , , , , . For every , from (5.1) we rewrite (3.1) as follows:
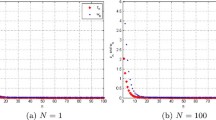
It is clear that the sequences , , and satisfy all the conditions of Theorem 4.1. From Theorem 3.1, we can conclude that the sequences and converge strongly to 0.
Table 1 shows the values of sequences and , where and and .

References
Cheng SS: Partial Difference Equations. Taylor & Francis, London; 2003.
Iiduka H: Fixed point optimization algorithm and its application to network bandwidth allocation. J. Comput. Appl. Math. 2012, 236: 1733–1742. 10.1016/j.cam.2011.10.004
Wang GQ, Cheng SS: Fixed point theorems arising from seeking steady states of neural networks. Appl. Math. Model. 2009, 33: 499–506. 10.1016/j.apm.2007.11.013
Roberts JS: Artificial Neural Networks. McGraw-Hill, Singapore; 1997.
Haykin S: Neural Networks: A Comprehensive Foundation. Macmillan Co., Englewood Cliffs; 1994.
Stampacchia G: Formes bilineaires coercitives sur les ensembles convexes. C. R. Math. Acad. Sci. Paris 1964, 258: 4414–4416.
Ceng LC, Yao JC: Iterative algorithm for generalized set-valued strong nonlinear mixed variational-like inequalities. J. Optim. Theory Appl. 2005, 124: 725–738. 10.1007/s10957-004-1182-z
Yao JC, Chadli O: Pseudomonotone complementarity problems and variational inequalities. In Handbook of Generalized Convexity and Monotonicity. Kluwer Academic, Dordrecht; 2005:501–558.
Glowinski R: Numerical Methods for Nonlinear Variational Problems. Springer, New York; 1984.
Blum E, Oettli W: From optimization and variational inequalities to equilibrium problems. Math. Stud. 1994, 63(14):123–145.
Combettes PL, Hirstoaga SA: Equilibrium programming in Hilbert spaces. J. Nonlinear Convex Anal. 2005, 6(1):117–136.
Plubtieng S, Punpaeng R: A general iterative method for equilibrium problems and fixed point problems in Hilbert spaces. J. Math. Anal. Appl. 2007, 336(1):455–469. 10.1016/j.jmaa.2007.02.044
Takahashi W, Shimoji K: Convergence theorems for nonexpansive mappings and feasibility problems. Math. Comput. Model. 2000, 32: 1463–1471. 10.1016/S0895-7177(00)00218-1
Takahashi S, Takahashi W: Viscosity approximation methods for equilibrium problems and fixed point problems in Hilbert spaces. J. Math. Anal. Appl. 2007, 331(1):506–515. 10.1016/j.jmaa.2006.08.036
Takahashi W: Nonlinear Functional Analysis. Yokohama Publishers, Yokohama; 2000.
Opial Z: Weak convergence of the sequence of successive approximation of nonexpansive mappings. Bull. Am. Math. Soc. 1967, 73: 591–597. 10.1090/S0002-9904-1967-11761-0
Xu HK: An iterative approach to quadric optimization. J. Optim. Theory Appl. 2003, 116: 659–678. 10.1023/A:1023073621589
Marino G, Xu HK: Weak and strong convergence theorem for strict pseudo-contractions in Hilbert spaces. J. Math. Anal. Appl. 2007, 329: 336–346. 10.1016/j.jmaa.2006.06.055
Kangtunyakarn A: Strong convergence theorem for a generalized equilibrium problem and system of variational inequalities problem and infinite family of strict pseudo-contractions. Fixed Point Theory Appl. 2011., 2011: Article ID 23
Kangtunyakarn A:A new iterative scheme for fixed point problems of infinite family of -pseudo contractive mappings, equilibrium problem, variational inequality problems. J. Glob. Optim. 2013, 56: 1543–1562. 10.1007/s10898-012-9925-0
Acknowledgements
The authors are greatly thankful to the referees for their useful comments and suggestions which improved the content of this paper. This research was supported by Science Achievement Scholarship of Thailand and the Research Administration Division of King Mongkut’s Institute of Technology Ladkrabang.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
Both authors contributed equally and significantly to this research article. Both authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
{kind=link}
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Suwannaut, S., Kangtunyakarn, A. The combination of the set of solutions of equilibrium problem for convergence theorem of the set of fixed points of strictly pseudo-contractive mappings and variational inequalities problem. Fixed Point Theory Appl 2013, 291 (2013). https://doi.org/10.1186/1687-1812-2013-291
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1812-2013-291