
Abstract
In this paper, the differential transformation method is applied by providing new theorems to develop exact and approximate solutions of nonlinear differential and integro-differential equations with proportional delays represented by nonlinear multi-pantograph equations. Some examples are given to demonstrate the validity and applicability of the present method and a comparison is made with existing results.
Similar content being viewed by others

1 Introduction
In this paper, we consider the following nonlinear differential and integro-differential equations with proportional delays:
where ℱ,  , K are given functions with appropriate domains of definition, , , , .
, K are given functions with appropriate domains of definition, , , , .
Functional differential and integro-differential equations with proportional delays are usually referred to as pantograph equations or generalized equations, and, as well, they are often used to model some problems with aftereffect in mechanics and the related scientific fields [1–13]. Many typical examples such as stress-strain states of materials, motion of rigid bodies and models of polymer crystallization can be found in Kolmanovskii and Myshkis’s monograph [14] and the references therein.
2 Differential transformation method
The method that is developed in this work depends on the differential transformation method (DTM) introduced by Zhou [15] in a study of electric circuits. This method constructs a semi-analytical numerical technique that uses Taylor series for the solution of differential equations in the form of polynomials. It is different from the high-order Taylor series method which requires symbolic computation of the necessary derivatives of the data functions.
There is no need for linearization or perturbations, large computational work and round-off errors are avoided. It has been used to solve effectively, easily and accurately a large class of linear and nonlinear problems with approximations [16–25].
The differential transformation of the k th derivative of function is defined as follows:
where is the original function and is the transformed function. Differential inverse transformation of is defined as follows:
In fact, inverse transformation (2) implies that the concept of differential transformation is derived from the Taylor series expansion. Although DTM is not able to evaluate the derivatives symbolically, relative derivatives can be calculated in an iterative way which is described by the transformed equations of the original function.
From definitions (1), (2) we can derive the following.
Theorem 1 Assume that , , and , , are the differential transformations of the functions , , and , , respectively, then:
The proof of Theorem 1 is given in [26].
3 Main results
In this section, we state the fundamental theorems of this paper.
Theorem 2 Assume that , and are the differential transformations of the functions , and , respectively, and , . Then:
Proof (i) From equation (1), we get
where , thus
and using (1) we have
where .
-
(ii)
Using the Leibnitz formula, we obtain
where , , and hence
From equation (1), we have
-
(iii)
From the proof of formula (i), we get
Then
-
(iv)
Analogously, from to previous part of the proof, we get
where , ; therefore
Then from (1), we have
The proof is complete. □
Theorem 3 Assume that , and are the differential transformations of the functions , and , respectively, and , . Then:
where .
Proof (I) It is obvious that
then
From here and equation (1), we get
-
(II)
Similarly as in previous part (I), we have
where , . Then
Using equation (1), we obtain
-
(III)
Put , then from the previous part we get
(3)
where , and
where , . From (3) and (4), we obtain
but for we get . Then, using equation (1), we get
The proof is complete. □
Some above mentioned formulae were proved by Abazari and Kilicman [27] or Mirzaee and Lafiti [28] but with many mistakes and in incorrect way, respectively.
4 Numerical examples
Example 1 As a practical example, we consider the following pantograph delay equation:
Using the differential transformation method, the differential transform version of equation (5) is
and the differential transform version of the initial condition has the form . From equation (6), we obtain the recurrence system of equations
From system (7), we have
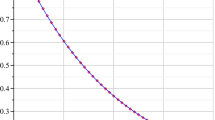
Using the inverse transformation rule (2), we obtain the following series solution:
The closed form of the above series solution is , which is the exact solution of equation (5).
The same equation was solved by Evans and Raslan [29] using the Adomian decomposition method with complicated calculations of Adomian’s polynomials. Ghomanjani and Farahi [30] solved equation (5) using the Bezier control points method and obtained only approximation solution in the form
Example 2 Consider the following delay differential equation of the third order:
Using the differential transformation method, the differential transform version of equation (8), we get
and the differential transform version of the initial conditions , , gives
From (9) we have
Solving recurrence equations (10), we get
Thus
where . From here and using the inverse transformation rule (2), we obtain series solution in the form
which is the exact solution of equation (8). Evans and Raslan [29] solved equation (8) using the Adomian decomposition method and obtained a sequence of approximate solutions in the form of triple integrals with Adomian’s polynomials that required many symbolic calculations to obtain approximate solutions of (8). Saeed and Rahman [31] also solved equation (8) using the differential transformation method, but they transformed equation (8) into a system of three differential equations, which is a uselessly complicated approach to solving equation (8).
Example 3 Consider the following delay differential equation of the second order:
Applying the differential transformation method to equation (11), we get
and for initial conditions , we have . From (12), we obtain recurrence equations
Solving recurrence equations (13), we have
Thus , . Using the inverse transformation rule (2), we obtain the exact solution .
Example 4 Consider the nonlinear pantograph-type integro-differential equation of the first order
subject to the initial condition . Substituting in integro-differential equation (14), we get . Then the differential transformed version of equation (14) has the form
Solving recurrence equations (15), we get
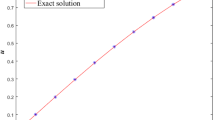
From here and using the inverse transformation rule (2), we obtain a series solution in the form
The closed form of the above series solution is , which is the exact solution of equation (14).
Abazari and Abazari [32] solved equation (14) but as the pantograph differential equation of the second order without using an integral transformation formula.
Example 5 Consider the following nonhomogeneous first-order integro-differential equation with proportional delay:
subject to initial condition . Substituting in equation (16), we obtain the second condition . Now, applying the differential transformation method to equation (16), we get
and for initial conditions , , we have , . Following the same procedure as in the above mentioned examples, we get
Similarly, we obtain , . Using the inverse transformation rule (2), we get the exact solution . A homogeneous form of equation (16) subject to initial conditions was solved by Abazari and Kilicman [27]. They obtained the closed form of a series solution in the form .
5 Conclusion
In the present paper, we have shown that the differential transformation method can be successfully used for solving nonlinear differential and integro-differential equations with proportional delays. New theorems are introduced with their proofs, and as application some examples are carried out. The main advantage of this method is that it can be applied directly to functional differential and integro-differential equations without requiring linearization, discretization or perturbation. Another important advantage is that this method is capable of greatly reducing the size of computational work and, moreover, the proposed method reduces the solution of a problem to the solution of a system of recurrence algebraic equations.
References
Ockendon JR, Tayler AB: The dynamics of a current collection system for an electric locomotive. Proc. R. Soc. Lond. Ser. A 1971, 332: 447-468.
Vanani K, Aminataci A: On the numerical solution of delay differential systems. J. Appl. Funct. Anal. 2010, 5: 169-176.
Kuang Y Mathematics in Science and Engineering 191. In Delay Differential Equations with Applications in Population Dynamics. Academic Press, San Diego; 1993.
Celik E, Karaduman E, Bayram M: Numerical solution of chemical differential algebraic equations. Appl. Math. Comput. 2003, 139: 259-264. 10.1016/S0096-3003(02)00178-9
Brunner H: Collocation Methods for Volterra Integral and Related Functional Differential Equations. Cambridge University Press, Cambridge; 2004.
Brunner H, Hu QY, Lin Q: Geometric meshes in collocation methods for Volterra integral equations with proportional delays. IMA J. Numer. Anal. 2001, 21: 783-798. 10.1093/imanum/21.4.783
Čermák J: The stability and asymptotic properties of the Θ-methods for the pantograph equation. IMA J. Numer. Anal. 2011, 31(4):1533-1551. 10.1093/imanum/drq021
Čermák J: On a differential equation with power coefficients and proportional delays. Tatra Mt. Math. Publ. 2007, 38: 57-69.
Čermák J: On a linear differential equation with a proportional delay. Math. Nachr. 2007, 280(5-6):495-504. 10.1002/mana.200410498
Ali I, Brunner H, Tang T: Spectral methods for pantograph-type differential and integral equations with multiple delays. Front. Math. China 2009, 4: 49-61. 10.1007/s11464-009-0010-z
Iserles A, Liu YK: On pantograph integro-differential equations. J. Integral Equ. Appl. 1994, 6: 213-237. 10.1216/jiea/1181075805
Ali I: Convergence analysis of spectral methods for integro-differential equations with vanishing proportional delays. J. Comput. Math. 2011, 29: 49-60.
Brunner H, Hu QY: Optimal superconvergence results for delay integro-differential equations of pantograph type. SIAM J. Numer. Anal. 2007, 45: 986-1004. 10.1137/060660357
Kolmanovskii V, Myshkis A: Introduction to the Theory and Applications of Functional Differential Equations. Kluwer Academic, Dordrecht; 1999.
Zhou JK: Differential Transformation and Its Applications for Electrical Circuits. Huazhong University Press, Wuhan; 1986. (in Chinese)
Arikoglu A, Ozkol I: Solution of boundary value problems for integrodifferential equations by using differential transform method. Appl. Math. Comput. 2005, 168: 1145-1158. 10.1016/j.amc.2004.10.009
Bert CV, Zeng H: Analysis of axial vibration of compound bars by differential transformation method. J. Sound Vib. 2004, 275: 641-647. 10.1016/j.jsv.2003.06.019
Chen CK, Chen SS: Application of the differential transformation method to a non-linear conservative system. Appl. Math. Comput. 2004, 154: 431-441. 10.1016/S0096-3003(03)00723-9
Kuo BL: Thermal boundary-layer problems in a semi-infinite flat plate by the differential transformation method. Appl. Math. Comput. 2004, 150: 303-320. 10.1016/S0096-3003(03)00233-9
Kuo BL: Heat transfer analysis for the Falkner-Skan wedge flow by the differential transformation method. Int. J. Heat Mass Transf. 2005, 48: 5036-5046. 10.1016/j.ijheatmasstransfer.2003.10.046
Malik M, Allali M: Characteristic equations of rectangular plates by differential transformation. J. Sound Vib. 2000, 233(2):359-366. 10.1006/jsvi.2000.2828
Arikoglu A, Özkol I: Inner-outer matching solution of Blasius equation by DTM. Aircr. Eng. Aerosp. Technol. 2005, 77: 298-301. 10.1108/00022660510606367
Khan Y, Svoboda Z, Šmarda Z: Solving certain classes of Lane-Emden type equations using differential transformation method. Adv. Differ. Equ. 2012., 2012: Article ID 174 10.1186/1687-1847-2012-174
Mukherjee S, Roy B, Chaterjee PK: Solution of Lane-Emden equation by differential transform method. Int. J. Nonlinear Sci. 2011, 12(4):478-484.
Hetmaniok E, Nowak I, Slota D, Witula R: A study of the convergence of error estimation for the homotopy perturbation method for the Volterra-Fredholm integral equations. Appl. Math. Lett. 2013, 26(1):165-169. 10.1016/j.aml.2012.08.005
Jang MJ, Chen CL, Liy YC: On solving the initial-value problems using the differential transformation method. Appl. Math. Comput. 2000, 115: 145-160. 10.1016/S0096-3003(99)00137-X
Abazari R, Kilicman A: Application of differential transformation method on nonlinear integro-differential equations with proportional delays. Neural Comput. Appl. 2012. 10.1007/s00521-012-1235-4
Mirzaee F, Lafiti L: Numerical solution of delay differential equations by differential transform method. J. Sci. Islam. Azad Univ. 2011, 20(78/2):83-88.
Evans DJ, Raslan KR: The Adomian decomposition method for solving delay differential equation. Int. J. Comput. Math. 2005, 82(1):49-54. 10.1080/00207160412331286815
Ghomanjani F, Farahi MH: The Bezier control points method for solving delay differential equation. Intell. Control Autom. 2012, 3: 188-196. 10.4236/ica.2012.32021
Saeed RK, Rahman BM: Differential transform method for solving of delay differential equation. Aust. J. Basic Appl. Sci. 2011, 5(4):201-206.
Abazari N, Abazari R: Solution of nonlinear second-order pantograph equations via differential transformation method. 58. Proceedings of World Academy of Science, Engineering and Technology 2009, 1052-1056.
Acknowledgements
The first author is supported by the Grant FEKT-S-11-2-921 of Faculty of Electrical Engineering and Communication, Brno University of Technology. The second author is supported by the Grant P201/11/0768 of the Czech Grant Agency (Prague).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
The authors have made the same contribution. All authors read and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Šmarda, Z., Diblík, J. & Khan, Y. Extension of the differential transformation method to nonlinear differential and integro-differential equations with proportional delays. Adv Differ Equ 2013, 69 (2013). https://doi.org/10.1186/1687-1847-2013-69
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2013-69